MTS-Mixers: Multivariate Time Series Forecasting via Factorized Temporal and Channel Mixing
Contents
- Abstract
- Introduction
- Preliminary
- MTS-Mixers
- Experiments
0. Abstract
Role of attention modules is not clear!!
Findings
- (1) Attention is not necessary for capturing temporal dependencies
- (2) Entanglement and redundancy in the capture of temporal and channel interaction affect the forecasting performance
- (3) It is important to model the mapping between the input and the prediction.
Propose *MTS-Mixers
- Two factorized modules to capture temporal and channel dependencies.
1. Introduction
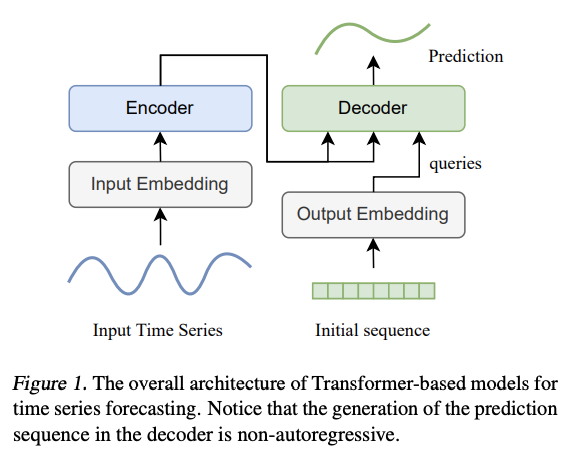
Transformer-based models
- Perform well on LTSF … Still some problems!
Limitation
-
(1) Lack of explanation about the attention mechanism for capturing temporal dependency
- (2) Heavily rely on additional positional or date-specific encoding
- May disturb the capture of temporal interaction
- (3) Bulk of additional operations beyond attention
Findings
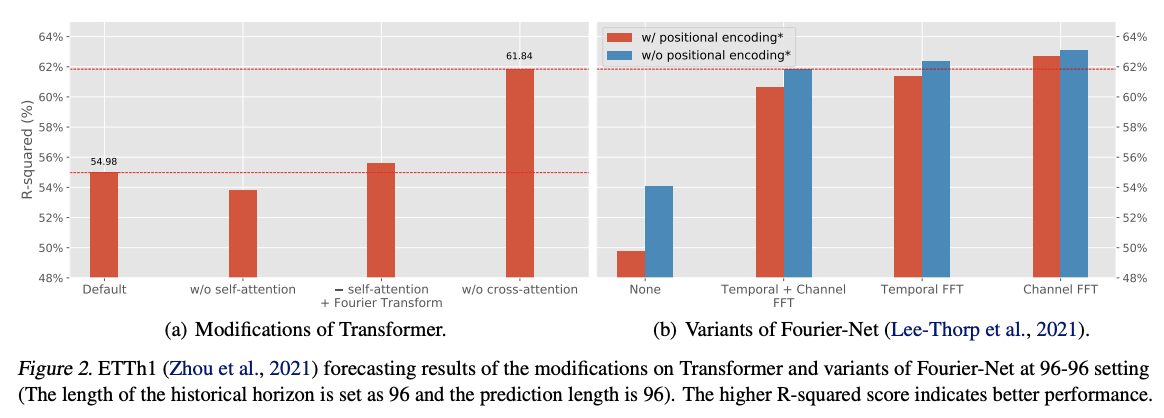
- (1) Replacing the attention layer with Fourier Transform maintains the forecasting performance
- (2) Removing the cross-attention significantly improves it.
\(\rightarrow\) Attention mechanism on TS forecasting tasks may not be that effective
Due to the difference in the sampling rate & # of sensors
\(\rightarrow\) MTS from different scenarios often vary greatly & serious redundancy
Example) \(\mathcal{X} \in \mathbb{R}^{n \times c}\)
- \(n\) : length of \(\mathcal{X}\)
- \(c\) : dimension size
\(\rightarrow\) uncertain which one (\(n,c\)) is bigger or smaller!
Generally has the low-rank property, such that \(\operatorname{rank}(\mathcal{X}) \ll \min (n, c)\).
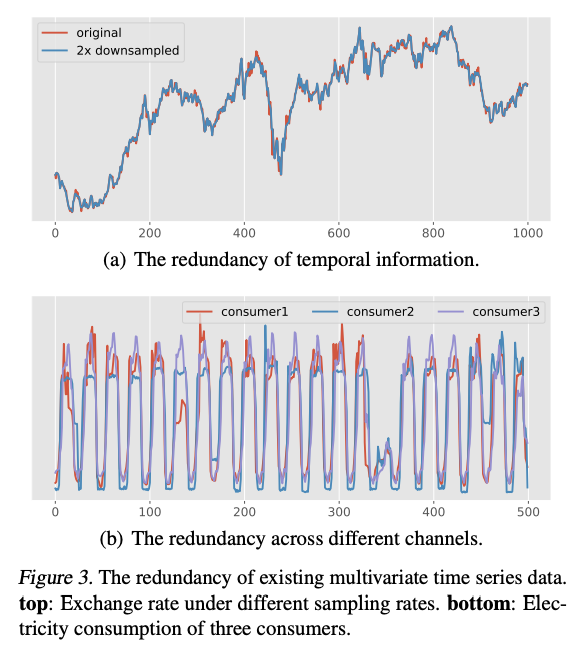
- Redundancy of temporal and channel information.
Solution: propose MTS-Mixers
Contributions
-
Investigate the attention mechanism in TS forecasting
& Propose MTS-Mixers
- which respectively capture temporal and channel dependencies
-
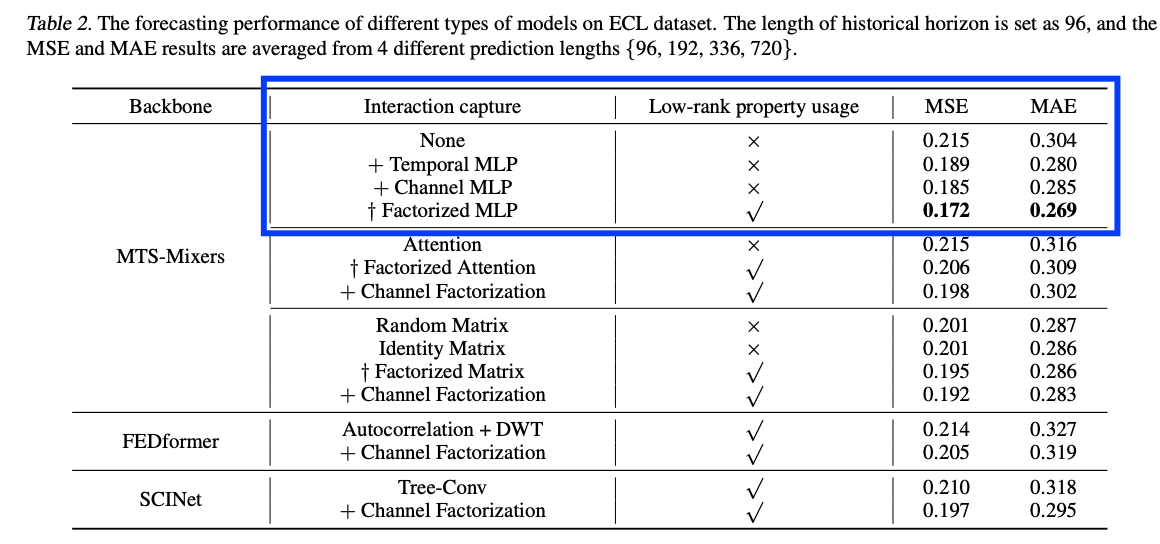
Leverage the low-rank property of existing TS via factorized temporal and channel mixing
-
Experiments
2. Preliminary
(1) Problem definition
Input TS: \(\mathcal{X}_h=\) \(\left[\boldsymbol{x}_1, \boldsymbol{x}_2, \ldots, \boldsymbol{x}_n\right] \in \mathbb{R}^{n \times c}\)
Output TS: \(\mathcal{X}_f=\left[\boldsymbol{x}_{n+1}, \boldsymbol{x}_{n+2}, \ldots, \boldsymbol{x}_{n+m}\right] \in \mathbb{R}^{m \times c}\)
- across all the \(c\) channels.
Forecasting tasks: learn a map \(\mathcal{F}: \mathcal{X}_h^{n \times c} \mapsto \mathcal{X}_f^{m \times c}\)
(2) Rethinking the mechanism of attention in Transformer-based forecasting models
Existing Transformer-based methods
- Step 1) 1D CNN for input embedding \(\mathcal{X}_{\text {in }} \in \mathbb{R}^{n \times d}\)
- with the positional or date-specific encoding
- Step 2) Self-attention
- Token-level temporal similarity
- \(\tilde{\mathcal{X}}=\operatorname{softmax}\left(\frac{\mathcal{X}_{\text {in }} \cdot \mathcal{X}_{\text {in }}^{\top}}{\sqrt{d}}\right) \cdot \mathcal{X}=R_1 \cdot \mathcal{X}_{\text {in }}\).
- where \(R_1 \in \mathbb{R}^{n \times n}\) describes token-wise temporal information.
- Step 3) FFN with two linear layers and activation function
- to learn channel-wise features
- Step 4) Decoder
- Initialized query \(Q \in \mathbb{R}^{m \times d}\)
- Output: \(\tilde{\mathcal{X}}_f=\operatorname{softmax}\left(\frac{Q \cdot \tilde{\mathcal{X}}^{\top}}{\sqrt{d}}\right) \cdot \tilde{\mathcal{X}}=R_2 \cdot \tilde{\mathcal{X}},\).
- where \(R_2 \in \mathbb{R}^{m \times n}\) describes the relationship between the input & output
- Step 5) Projection layer
- applied on \(\tilde{\mathcal{X}}_f\) to obtain \(\mathcal{X}_f \in \mathbb{R}^{m \times c}\).
Summary
Contain two stages:
- (1) Learning token-wise temporal dependency across channels,
- (2) Learning a map between input & output
However, as shown in Figure 2 …
\(\rightarrow\) Removing self-attention or cross-attention is still OK
3. MTS-Mixers
Notation
- Input \(\mathcal{X}_h \in \mathbb{R}^{n \times c}\)
- Output \(\mathcal{X}_f \in \mathbb{R}^{m \times c}\).
( Input embedding module is optional )
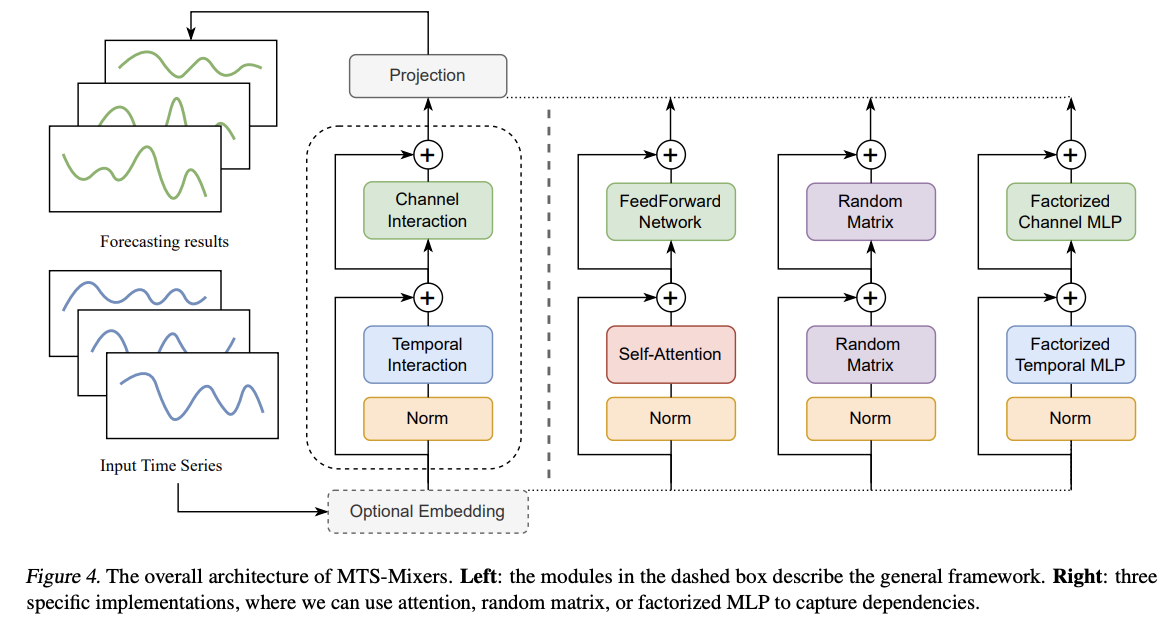
Overall Process
\(\begin{aligned} \mathcal{X}_h^{\mathcal{T}} & =\operatorname{Temporal}\left(\operatorname{norm}\left(\mathcal{X}_h\right)\right) \\ \mathcal{X}_h^{\mathcal{C}} & =\operatorname{Channel}\left(\mathcal{X}_h+\mathcal{X}_h^{\mathcal{T}}\right) \\ \mathcal{X}_f & =\operatorname{Linear}\left(\mathcal{X}_h^{\mathcal{T}}+\mathcal{X}_h^{\mathcal{C}}\right) . \end{aligned}\).
Three specific implementations
- (1) Attention-based MTS-Mixer
- (2) Random matrix MTS-Mixer
- (3) Factorized temporal and channel mixing
(1) Attention-based MTS-Mixer
\(\begin{aligned} \tilde{\mathcal{X}}_h & =\operatorname{norm}\left(\mathcal{X}_h\right)+\operatorname{PE}\left(\mathcal{X}_h\right) \\ \mathcal{X}_h^{\mathcal{T}} & =\operatorname{Attention}\left(\tilde{\mathcal{X}}_h, \tilde{\mathcal{X}}_h, \tilde{\mathcal{X}}_h\right) \\ \mathcal{X}_h^{\mathcal{C}} & =\operatorname{FFN}\left(\tilde{\mathcal{X}}_h+\mathcal{X}_h^{\mathcal{\tau}}\right) . \end{aligned}\).
Step 1) Add the sinusoidal positional encoding
\(\rightarrow\) Obtain the input embedding \(\tilde{\mathcal{X}}_h\)
Step 2) MHSA
- Capture temporal dependency \(\mathcal{X}_h^\tau\).
Step 3) FFN
- learn the channel interaction \(\mathcal{X}_h^{\mathcal{C}}\).
Step 4) Linear Layer ( NO decoder )
- directly learn the map between the input & output
(2) Random matrix MTS-Mixer
\(\mathcal{X}_f=F \cdot \sigma(T) \cdot \mathcal{X}_h \cdot \phi(C)\).
What we need to learn …
- (1) \(T \in \mathbb{R}^{n \times n}\) : the temporal dependency,
- (2) \(C \in \mathbb{R}^{c \times c}\) : the channel dependency
- (3) Projection \(F \in \mathbb{R}^{m \times n}\)
Because the initialization of the matrices \(F\), \(T\), and \(C\) are controllable
\(\rightarrow\) Call it a random matrix MTSMixer
(3) Factorized temporal and channel mixing
Low rank property of TS data
\(\rightarrow\) Factorized temporal and channel mixing strategies
- to capture dependencies with less redundancy
Extract the temporal dependencies as…
\(\begin{aligned} \mathcal{X}_{h, 1}, \ldots, \mathcal{X}_{h, s} & =\operatorname{sampled}\left(\operatorname{norm}\left(\mathcal{X}_h\right)\right), \\ \mathcal{X}_{h, i}^{\mathcal{T}} & =\operatorname{Temporal}\left(\mathcal{X}_{h, i}\right) \quad i \in[1, s], \\ \mathcal{X}_h^{\mathcal{T}} & =\operatorname{merge}\left(\mathcal{X}_{h, 1}^{\mathcal{T}}, \ldots, \mathcal{X}_{h, s}^{\mathcal{T}}\right) \end{aligned}\).
- Step 1) downsample the original TS
- Step 2) Utilize one temporal feature extractor
- (e.g., MLP or attention)
- Step 3) Merge them in the original order.
For TS with channel redundancy …
- Reduce the noise of tensors corresponding to the TSin channel dimension by “matrix decomposition”
\(\begin{aligned} \tilde{\mathcal{X}}_h^c & =\mathcal{X}_h+\mathcal{X}_h^{\mathcal{\tau}}, \\ \tilde{\mathcal{X}}_h^c & =\mathcal{X}_h^{\mathcal{C}}+N \approx U V+N, \end{aligned}\).
- \(N \in \mathbb{R}^{n \times c}\) : the noise
- \(\mathcal{X}_h^{\mathcal{c}} \in \mathbb{R}^{n \times c}\) : channel dependency after denoising
- \(U \in\) \(\mathbb{R}^{n \times m}\) and \(V \in \mathbb{R}^{m \times c}(m<c)\) : factorized channel interaction.
\(\mathcal{X}_h^{\mathcal{C}}=\sigma\left(\tilde{\mathcal{X}_h^{\mathcal{C}}} \cdot W_1^{\top}+b_1\right) \cdot W_2^{\top}+b_2,\).
- where \(W_1 \in \mathbb{R}^{m \times c}, W_2 \in \mathbb{R}^{c \times m}\)
4. Experiments