Normalizing Flows - MAF, IAF, RealNVP
( 참고 : coursera : Probabilistic Deep Learning with Tensorflow2, Tensorflow official website )
Contents
- Review of Normalizing Flow
- Autoregressive Flow
- Masked Autoregressive Flow (MAF)
- Inverse Autoregressive Flow (IAF)
- Real-NVP & NICE
- Training MAF
- [ADVANCED] compose multiple bijectors
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import tensorflow as tf
import tensorflow_probability as tfp
tfd = tfp.distributions
tfb = tfp.bijectors
tfpl = tfp.layers
1. Review of Normalizing Flow
(1) base distribution :
- \(\mathbf{z} \sim N(0, \mathbf{I})\) .
(2) Normalizing Flow :
- \(\mathbf{z}_0 = \mathbf{z}\).
- \(\mathbf{z}_k = \mathbf{f}_k(\mathbf{z}_{k-1}) \quad k=1, \ldots, K.\).
(3) Log probability :
- \(\log p(\mathbf{x}) = \log p(\mathbf{z}) - \sum_{k=1}^K \log \left(\mid \det \left( \frac{\partial \mathbf{f}_k}{\partial \mathbf{z}_{k-1}}(\mathbf{z}_{k-1}) \right) \mid \right)\).
- 위 식에서, 우리는 determinant of Jacobian을 구해야 한다.
2. Autoregressive Flow
( Autoregressive flow 및 이를 활용한 알고리즘들( MAF, IAF, MADE 등) 에 대한 구체적인 내용은, 이전에 포스트한 논문 리뷰들을 참고하길 바란다. )
핵심은, autoregressive한 형태를 가정하게 될 경우에, Jacobian이 triangular해지고, 따라서 determinant를 쉽게 구할 수 있다 ( by 대각 원소들의 곱으로 )
간단히 수식만 적자면, 아래와 같다.
\(\begin{align} p(x_i \mid\mathbf{x}_{1:i-1}) &= \mathcal{N}(x_i\mid\mu_i, \exp(\sigma_i)^2),\\ \text{where}\qquad \mu_i &= f_{\mu_i}(\mathbf{x}_{1:i-1})\\ \text{and}\qquad \sigma_i &= f_{\sigma_i}(\mathbf{x}_{1:i-1}). \end{align}\).
\(x_i = \mu_i(\mathbf{x}_{1:i-1}) + \exp(\sigma_i(\mathbf{x}_{1:i-1})) z_i \quad \quad i=1, \ldots, D\).
where \(z_i \sim N(0, 1)\)
2-1. Masked Autoregressive Flow (MAF)
\(x\)는 아래와 같은 과정으로 생성(sample)된다.
- \(x_1 = f_{\mu_1} + \exp(f_{\sigma_1})z_1\) for \(z_1 \sim N(0, 1)\)
- \(x_2 = f_{\mu_2}(x_1) + \exp(f_{\sigma_2}(x_1))z_2\) for \(z_2 \sim N(0, 1)\)
- \(x_3 = f_{\mu_3}(x_1, x_2) + \exp(f_{\sigma_3}(x_1, x_2))z_3\) for \(z_3 \sim N(0, 1)\)
여기서 \(f_{\mu_i}\) and \(f_{\sigma_i}\)를 구현하는데에 있어서 MADE(masked autoencoder for distribution estimation)가 사용된다.
- weight에 마스킹을 해서 autoregressive한 형태를 만든다
- network간의 weight는 서로 공유되어, 총 파라미터수를 줄일 수 있다.
위 식을 바꿔쓰면, 아래와 같이 쓸 수 있다,
\(z_i = \frac{x_i - f_{\mu_i}}{\exp(f_{\sigma_i})} \quad \quad i=0, \ldots, D-1\).
이를 통해 알 수 있는 것은, \(z_i\)는 이전의 \(z\)들에 의존하지 않기 떄문에 한번에 (one-pass로) density evaluation을 할 수 있다.
장/단점
- 장점) \(x\)로부터 “\(z\)를 구하는 것은 빠르다” ( density evaluation은 빠르다 )
- 단점) \(z\)로부터 “\(x\)를 구하는 것은 느리다” ( sampling은 느리다 )
(1) MADE 네트워크
- 기본 데이터 및 parameter 설정
params = 2
event_shape = 3
h = 16
n = 1000
data = tf.random.normal([n,event_shape])
- 아래와 같이
tfb.AutoregressiveNetwork를 사용하여 MADE를 만든다.
made = tfb.AutoregressiveNetwork(params=params,
event_shape=[event_shape],
hidden_units=[h,h],
activation='sigmoid')
- data를 집어넣은 결과 출력되는 output의 size는 다음과 같다.
made(data).shape
TensorShape([1000, 3, 2])
(2) MAF bijector
tfb.MaskedAutoregressiveFlow함수
MAF_bij = tfb.MaskedAutoregressiveFlow(shift_and_log_scale_fn=MADE)
(3) MAF
tfd.TransformedDistribution함수
base_normal = tfd.Normal(loc=0,scale=1)
MAF = tfd.TransformedDistribution(base_normal,MAF_bij,event_shape=[event_shape])
2-2. Inverse Autoregressive Flow
Autoregressive Flow의 식 :
- \(x_i = \mu_i + \exp(\sigma_i) z_i \quad \quad i=1, \ldots, D\).
하지만, scale/shift function이, \(x_i\)의 함수가 아닌 ’\(z_i\)의 함수’라는 점이 큰 차이점이다.
\(\mu_i = f_{\mu_i}(z_1, \ldots, z_{i-1}) \quad \quad \sigma_i = f_{\sigma_i}(z_1, \ldots, z_{i-1})\).
장/단점
- 장점) \(z\)로부터 “\(x\)를 구하는 것은 빠르다” ( sampling은 빠르다 )
- 단점) \(x\)로부터 “\(z\)를 구하는 것은 느리다” ( density evaluation은 느리다 )
(1) MADE 네트워크
- 앞과 동일
(2) IAF bijector
tfb.Invert&tfb.MaskedAutoregressiveFlow함수
IAF_bij = tfb.Invert(tfb.MaskedAutoregressiveFlow(shift_and_log_scale_fn=MADE))
(3) IAF
tfd.TransformedDistribution함수
base_normal = tfd.Normal(loc=0,scale=1)
IAF = tfd.TransformedDistribution(base_normal,IAF_bij,event_shape=[event_shape])
3. Real-NVP & NICE
\(\begin{align} x_i &= z_i \qquad &i = 1, \ldots, d \\ x_i &= \mu_i + \exp(\sigma_i) z_i \qquad &i = d+1, \ldots D \end{align}\).
where \(\mu_i = f_{\mu_i}(z_1, \ldots, z_{d})\) & \(\sigma_i = f_{\sigma_i}(z_1, \ldots, z_{d})\).
- 앞의 \(d\)차원은 transform X , 뒤에 \(D-d\)차원은 transform O
- forward and backward pass 둘 다 parallel하게 처리 가능
( NICE는 Real-NVP에서 scale=1인 version이다 )
(1) NETWORK
tfb.real_nvp_default_template: Build a scale-and-shift function using a multi-layer neural network.
shift_and_log_scale_fn = tfb.real_nvp_default_template(
hidden_layers=[h,h],activation=tf.nn.relu)
# NICE로 하고 싶으면 ( scale = 1)
shift_and_log_scale_fn = tfb.real_nvp_default_template(
hidden_layers=[h,h],activation=tf.nn.relu, shift_only=True)
(2) RealNVP_bijector
# (1) masking - 비율로 지정해주기
RealNVP_bij = tfb.RealNVP(
fraction_masked=0.5,shift_and_log_scale_fn=shift_and_log_scale_fn)
# (2) masking - 차원 개수로 지정해주기
d = int(0.5*D)
RealNVP_bij = tfb.RealNVP(
num_maksed=d,shift_and_log_scale_fn=shift_and_log_scale_fn)
(3) RealNVP
base_mvn = tfd.MultivariateNormalDiag(loc=[0.,0.,0.])
RealNVP = tfd.TransformedDistribution(distribution=base_mvn,bijector=RealNVP_bij)
(4) Combine multiple RealNVP layer
permute = tfp.bijectors.Permute(permutation=[1,2,0])
RealNVP_bij1 = tfb.RealNVP(
fraction_masked=0.5,shift_and_log_scale_fn=tfb.real_nvp_default_template(hidden_layers=[h,h]))
RealNVP_bij2 = tfb.RealNVP(
fraction_masked=0.5,shift_and_log_scale_fn=tfb.real_nvp_default_template(hidden_layers=[h,h]))
RealNVP_bij3 = tfb.RealNVP(
fraction_masked=0.5,shift_and_log_scale_fn=tfb.real_nvp_default_template(hidden_layers=[h,h]))
chained_bijs = tfb.Chain([RealNVP_bij3,permute,RealNVP_bij2,permute,RealNVP_bij1])
mvn = tfd.MultivariateNormalDiag(loc=[0.,0.,0.])
RealNVP = tfd.TransformedDistribution(distribution=mvn,bijector=chained_bijs)
4. Training MAF
사이킷선의 make_moons 데이터셋을 사용해서 위에서 배운 MAF (Masked Autoregressive Flow)에 적용해볼 것이다.
(1) Import Dataset
from sklearn import datasets
from sklearn.preprocessing import StandardScaler
n_samples = 1000
noisy_moons = datasets.make_moons(n_samples=n_samples, noise=.05)
X, y = noisy_moons
X_data = StandardScaler().fit_transform(X)
xlim, ylim = [-2, 2], [-2, 2]
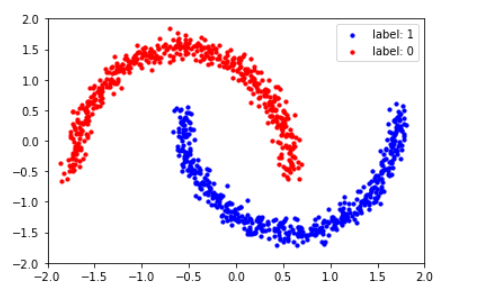
- 데이터의 모습을 시각화하면 아래와 같다.
y_label = y.astype(np.bool)
X_train, Y_train = X_data[..., 0], X_data[..., 1]
plt.scatter(X_train[y_label], Y_train[y_label], s=10, color='blue')
plt.scatter(X_train[y_label == False], Y_train[y_label == False], s=10, color='red')
plt.legend(['label: 1', 'label: 0'])
plt.xlim(xlim)
plt.ylim(ylim)
(2) MAF 생성
MAF (Masked Autoregressive Flow)를 만들기 위해, 아래의 것들을 생성해야 한다.
- 1) base distribution
- 2) MAF bijector
- 3) trainable distribution
(a) Base distribution
- 기본 base distribution으로, 평균=0,표준편차=1의 Normal distribution을 잡는다.
base_distn = tfd.Normal(loc=0,scale=1)
(b) MAF bijector
- step 1)
tfb.AutoregressiveNetwork를 사용하여 MADE (Masked Autoencoder for Distribution Estimation)를 만든다 - step 2)
tbf.MaskedAutoregressiveFlow의shift_and_log_scale_fn의 값으로 step1)에서 생성한 MADE를 넣는다.
def make_MAF(hidden_units=[16,16],activation='relu'):
MADE = tfb.AutoregressiveNetwork(
params=2,event_shape=[2],
hidden_units=hidden_units,activation=activation)
return tfb.MaskedAutoregressiveFlow(shift_and_log_scale_fn=MADE)
(c) Trainable distribution
tfd.TransformedDistribution을 사용하여, base distribution에 bijector를 적용하여 생성한다.
trainable_dist = tfd.TransformedDistribution(base_distn,make_MAF(),
event_shape=[2])
(3) Functions for Visualization
plot_contour_prob : (여러 개의) distribution의 contour plot을 Grid 형식으로 그리는 함수이다.
- dist : 그리고자하는 분포들 ( list 형태 )
- rows : 시각화할 Grid의 row 개수
def plot_contour_prob(dist, rows=1, title=[''], scale_fig=4):
cols = int(len(dist) / rows)
xx = np.linspace(-5.0, 5.0, 100)
yy = np.linspace(-5.0, 5.0, 100)
X, Y = np.meshgrid(xx, yy)
fig, ax = plt.subplots(rows, cols, figsize=(scale_fig * cols, scale_fig * rows))
fig.tight_layout(pad=4.5)
i = 0
for r in range(rows):
for c in range(cols):
Z = dist[i].prob(np.dstack((X, Y)))
if len(dist) == 1:
axi = ax
elif rows == 1:
axi = ax[c]
else:
axi = ax[r, c]
# Plot contour
p = axi.contourf(X, Y, Z)
# Add a colorbar
divider = make_axes_locatable(axi)
cax = divider.append_axes("right", size="5%", pad=0.1)
cbar = fig.colorbar(p, cax=cax)
# Set title and labels
axi.set_title('Filled Contours Plot: ' + str(title[i]))
axi.set_xlabel('x')
axi.set_ylabel('y')
i += 1
plt.show()
_plot : 샘플들의 산점도를 그리는 함수이다
def _plot(results, rows=1, legend=False):
cols = int(len(results) / rows)
f, arr = plt.subplots(rows, cols, figsize=(4 * cols, 4 * rows))
i = 0
for r in range(rows):
for c in range(cols):
res = results[i]
X, Y = res[..., 0].numpy(), res[..., 1].numpy()
if rows == 1:
p = arr[c]
else:
p = arr[r, c]
p.scatter(X, Y, s=10, color='red')
p.set_xlim([-5, 5])
p.set_ylim([-5, 5])
p.set_title(names[i])
i += 1
compare_samples_A_B : samples에 담긴 2개의 sample ( 1.정답 샘플 & 2.예측 샘플 )을 시각적으로 비교해보는 함수이다.
def compare_samples_A_B(samples):
f, arr = plt.subplots(1, 2, figsize=(15, 6))
names = ['Data', 'Trainable']
samples = [tf.constant(X_data), samples[-1]]
for i in range(2):
res = samples[i]
X, Y = res[..., 0].numpy(), res[..., 1].numpy()
arr[i].scatter(X, Y, s=10, color='red')
arr[i].set_xlim([-2, 2])
arr[i].set_ylim([-2, 2])
arr[i].set_title(names[i])
visualize_training_data(samples)
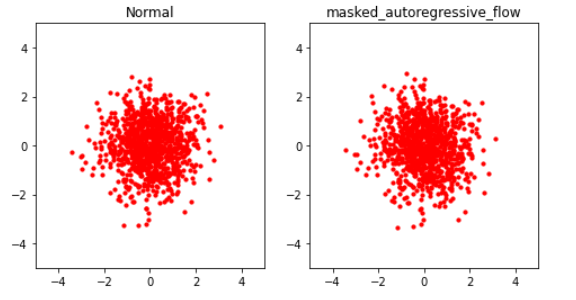
(4) BEFORE train
base distribution에서 (1000,2) shape의 샘플을 뽑은 뒤, (학습되기 이전의) MAF에 적용하여 어떻게 생겼는지 그려보자.
-
sampling & pass through bijector
trainable_dist.bijector.forward(x)를 통해, 원하는 샘플을 bijector에 통과시킬 수 있다.
x = base_distn.sample((1000,2))
names = [base_distn.name,trainable_dist.bijector.name]
samples = [x,trainable_dist.bijector.forward(x)]
- Visualization
_plot(samples, names,rows=1, legend=False)
(5) Train
from tensorflow.keras.layers import Input
from tensorflow.keras import Model
from tensorflow.keras.callbacks import LambdaCallback
MAF를 학습하기 위한 train_flow함수는 아래와 같다.
- optimizer : Adam optimizer
- loss : NLL
def train_flow(trainable_distribution,target_X, n_epochs=200, batch_size=None, n_disp=100):
######## (1) Define data shape ########################
n = target_X.shape[0]
dim = target_X.shape[1]
######## (2) Make model ################################
x_ = Input(shape=(dim,), dtype=tf.float32)
log_prob_ = trainable_distribution.log_prob(x_)
model = Model(x_, log_prob_)
model.compile(optimizer=tf.optimizers.Adam(),
loss=lambda _, log_prob: -log_prob)
if batch_size is None:
batch_size = n
######## (3) Call back ################################
epoch_callback = LambdaCallback(
on_epoch_end=lambda epoch, logs:
print('\n Epoch {}/{}'.format(epoch+1, n_epochs, logs),
'\n\t ' + (': {:.4f}, '.join(logs.keys()) + ': {:.4f}').format(*logs.values()))
if epoch % n_disp == 0 else False)
######## (4) Train model ################################
history = model.fit(x=target_X, y=np.zeros((n, 0), dtype=np.float32),
batch_size=batch_size, epochs=n_epochs,
validation_split=0.2,shuffle=True,
verbose=False,callbacks=[epoch_callback])
return history
epoch을 600으로해서 학습시킨 결과는 아래와 같다.
history = train_flow(trainable_dist,X_data,n_epochs=600,n_disp=60)
Epoch 1/600
loss: 2.8013, val_loss: 2.7621
Epoch 61/600
loss: 2.6654, val_loss: 2.6097
Epoch 121/600
loss: 2.6282, val_loss: 2.5701
Epoch 181/600
loss: 2.5682, val_loss: 2.5110
Epoch 241/600
loss: 2.4571, val_loss: 2.4109
Epoch 301/600
loss: 2.2855, val_loss: 2.2625
Epoch 361/600
loss: 2.1901, val_loss: 2.1973
Epoch 421/600
loss: 2.1479, val_loss: 2.1778
Epoch 481/600
loss: 2.1173, val_loss: 2.1621
Epoch 541/600
loss: 2.0901, val_loss: 2.1504
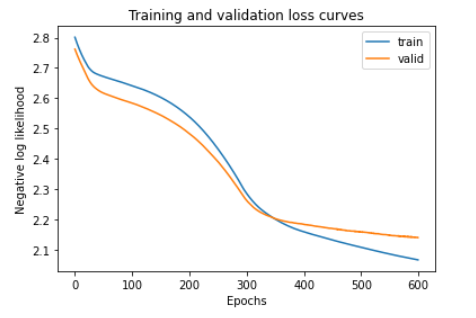
(6) AFTER train
학습 과정에서의 loss가 어떻게 떨어졌는지 확인해보자.
train_losses = history.history['loss']
valid_losses = history.history['val_loss']
plt.plot(train_losses, label='train')
plt.plot(valid_losses, label='valid')
plt.legend()
plt.xlabel("Epochs")
plt.ylabel("Negative log likelihood")
plt.title("Training and validation loss curves")
plt.show()
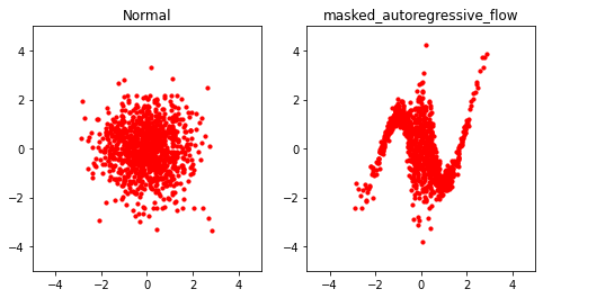
(7) Result & Visualization
임의로 (1000,2) shape의 샘플을 뽑은 뒤, 이를 (학습이 완료된) 우리의 trainable_dist의 bijector에 forward pass를 해봤다.
x = base_distn.sample((1000,2))
names = [base_distn.name,trainable_dist.bijector.name]
samples = [x,trainable_dist.bijector.forward(x)]
그 결과, make_moons 데이터셋과 유사한 모양을 가짐을 알 수 있다. ( 어느정도 학습이 잘 되어 보인다. )
_plot(samples, names,rows=1, legend=False)
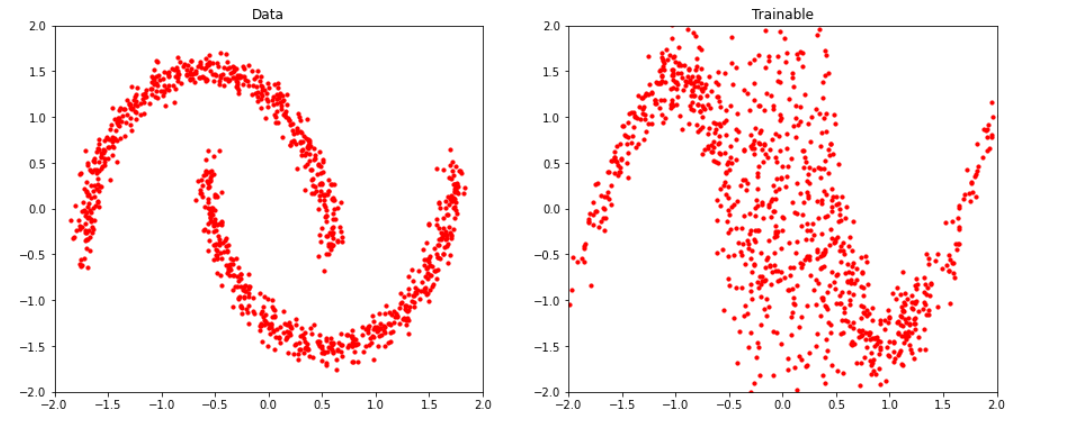
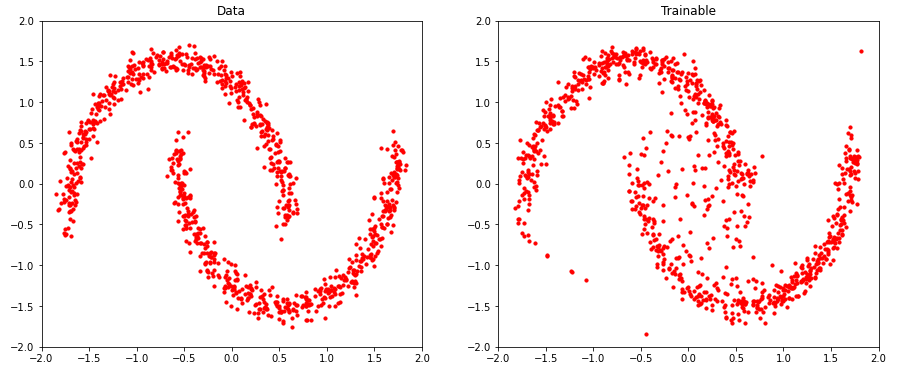
(1) 실제 정답 데이터와, (2) base distn에서 뽑은 뒤 학습시킨 bijector에 통과시킨 우리의 데이터를 비교해보면 아래와 같다.
compare_samples_A_B(samples)
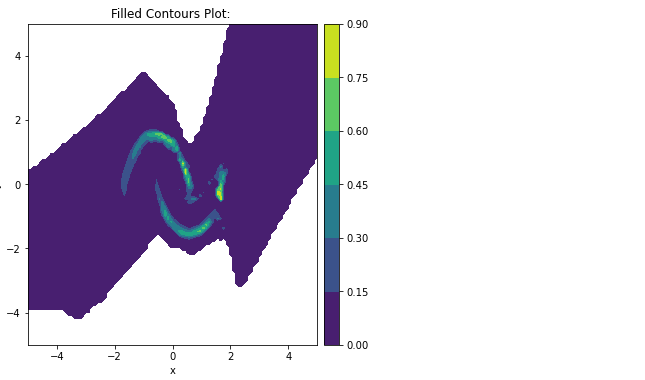
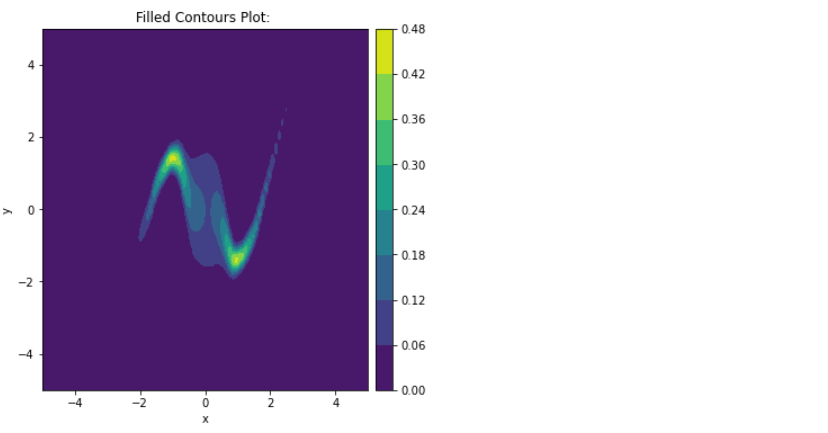
Contour plot을 그려봐도 이와 유사함을 확인할 수 있다.
plot_contour_prob([trainable_dist],scale_fig=6)
5. [ADVANCED] compose multiple bijectors
위의 4.Training MAF에서는 하나의 MAF bijector만을 사용하였다. 하지만 보다 complex한 distribution을 잡아내기 위해선, 더 많은 bijector을 쌓아야 한다. ( compose bijectors! )
tfb.Chain을 사용해서 여러개의 bijector들을 stacking한다.- 중간중간에
tfb.Permute을 해줘서, 모든 dimension이 고르게 transform 될 수 있도록 해준다.
num_bijectors=6
bijectors=[]
for i in range(num_bijectors):
masked_auto_i = make_MAF(hidden_units=[256,256],activation='relu')
bijectors.append(masked_auto_i)
bijectors.append(tfb.Permute(permutation=[1,0]))
flow_bijectors = tfb.Chain(list(reversed(bijectors[:-1])))
trainable_dist = tfd.TransformedDistribution(distribution=base_distn,
bijector=flow_bijectors,
event_shape=[2])
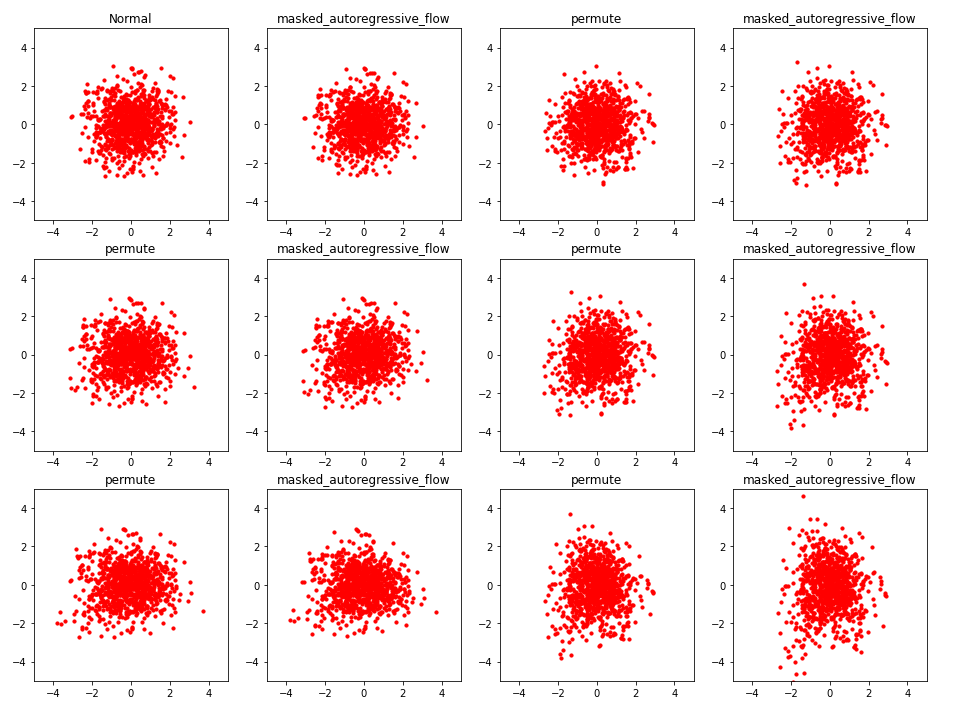
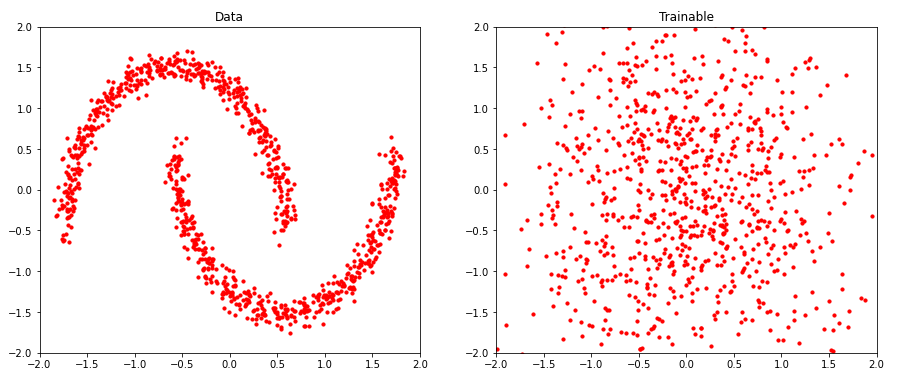
(1000,2)개의 샘플을 만든다. 그리고 이 샘플들이, 각각의 bijector를 통과하면서 그 모습이 어떻게 바뀌는지를 확인해보자.
( base distn에서 처음 뽑힌 sample과, 6개의 bijector와, 그 사이사이에 있는 5개의 permutation까지 총 12개의 sample이 생성한다 )
def make_samples():
x = base_distn.sample((1000, 2))
samples = [x]
names = [base_distn.name]
for bijector in reversed(trainable_dist.bijector.bijectors):
x = bijector.forward(x)
samples.append(x)
names.append(bijector.name)
return names, samples
names, samples = make_samples()
아직까지 학습이 이루어지지 않아서, 그 모습이 매우 noisy한 것을 확인할 수 있다.
_plot(samples, names,rows=3, legend=False)
compare_samples_A_B(samples)
이제 학습을 진행해보겠다. Loss가 잘 떨어지고 있는 것을 알 수 있다. 또한, 이전에 bijector를 1개만 사용했을 때보다 성능이 더 좋은 것을 알 수 있다.
history = train_dist_routine(trainable_dist,X_data,n_epochs=600,n_disp=100)
Epoch 1/600
loss: 2.9205, val_loss: 2.6369
Epoch 101/600
loss: 2.3190, val_loss: 2.2202
Epoch 201/600
loss: 2.0324, val_loss: 1.9915
Epoch 301/600
loss: 2.0080, val_loss: 1.9382
Epoch 401/600
loss: 1.4850, val_loss: 1.5755
Epoch 501/600
loss: 1.3063, val_loss: 1.5191
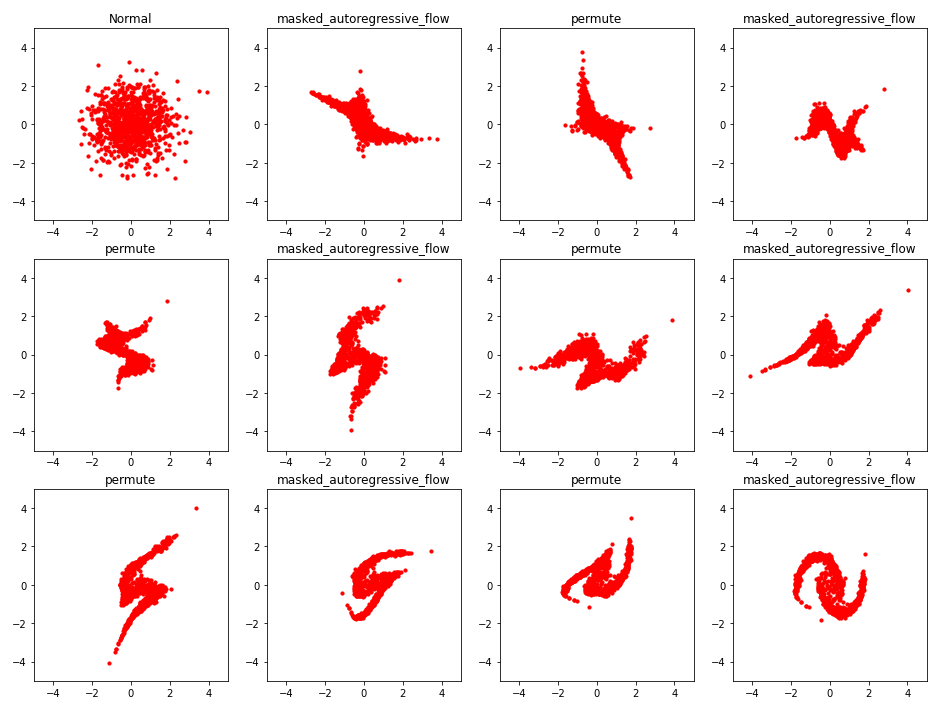
이제 다시 샘플을 뽑은 뒤, 학습이 완료된 MAF에 통과시켜 보겠다. bijector 하나하나를 지날 떄 마다, 그 모습이 어떻게 바뀌는지 확인해보면 아래와 같다.
names, samples = make_samples()
_plot(samples, names,rows=3, legend=False)
compare_samples_A_B(samples)
plot_contour_prob([trainable_dist],scale_fig=6