SelfAugment : Automatic Augmentation Policies for Self-Supervised Learning
Contents
- Abstract
- Introduction
- Background & Related Work
- Self-supervised RL
- Learning data augmentation policies
- Self-supervised Evaluation & Data Augmentation
- Self-supervised evaluation
- Self-supervised DA policies
0. Abstract
(common practice) Unsupervised Representation Learning
\(\rightarrow\) use labeled data to evaluate the quality of representation
- this evaluation : guide line to data augmentation policy
But in real world …. NO LABELS!
This paper :
-
evaluating the learned representation with a SELF-supervised image rotation task
is highly correlated with SUPERVISED evaluations
( rank correlation > 0.94 )
-
propose Self-Augment
Self-Augment
automatically & efficiently select augmentation policies, without using supervised evaluations
1. Introduction
Recent works :
- used extensive supervised evaluations to choose data augmentation policies
- best policies = sweet spot
- makes it difficult to determine the corresponding image pair , while retaining salient features
\(\rightarrow\) in reality, hard to obtain labeled data!
Question :
How to evaluate, w.o labeled data??
Contributions
-
Linear image-rotation-prediction evaluation task
= highly correlated with downstream supervised task
-
Adapt 2 automatic Data Augmentation algorithms ( for instance CL )
-
Linear image-rotation-prediction :
- works across network architectures
- stronger CORR than jigsaw, color prediction task
Conclusion : IMAGE ROTATION PREDICTION is a strong & unsupervised evalaution criteria for evaluating & selecting data augmentations ( for instance CL )
2. Background & Related Work
(1) Self-supervised RL
Common loss : InfoNCE
\(\mathcal{L}_{N C E}=-\mathbb{E}\left[\log \frac{\exp \left(\operatorname{sim}\left(\mathbf{z}_{1, \mathbf{i}}, \mathbf{z}_{2, \mathbf{i}}\right)\right.}{\sum_{j=1}^{K_{d}} \exp \left(\operatorname{sim}\left(\mathbf{z}_{1, \mathbf{i}}, \mathbf{z}_{2}, \mathbf{j}\right)\right)}\right]\).
- has been shown to maximize a lower bound on the mutual information \(I\left(\mathbf{h}_{\mathbf{1}} ; \mathbf{h}_{\mathbf{2}}\right)\)
Algorithms :
-
SimCLR : relies on large batch size
-
MoCo : maintains a large queue of contrasting images
\(\rightarrow\) this paper focus on using MoCo for experiment!
Self-supervised model evaluation : done by..
- (1) separability
- Network = frozen
- Training data : trains a supervised linear model
- (2) transferability
- Network = frozen / fine-tuned
- Transfer Task Model ( fine-tuned using different dataset )
- (3) semi-supervised
- Network = frozen / fine-tuned
- either “separability” or “transferability” tasks
This paper seeks label-free & task-agnostic evaluation
(2) Learning data augmentation policies
this paper : use a self-supervised evaluation to automatically learn an augmentation policy for instance contrastive models
FAA (Fast Auto Augment)
- search based automatic augmentation framework
RandomAugment
- sampling-based approach
3. Self-supervised Evaluation & Data Augmentation
Central Goals
-
(1) establish a strong correlation between SELF-supervised & SUPERVISED task
-
(2) develop a practical algorithm for SELF-supervised DA selection
(1) Self-supervised evaluation
LABELED data augmentation policy selection
- can directly optimize
UN-LABELED data augmentation policy selection
- seek an evaluation criteria, that is highly correlated with supervised performance without requiring labels
Self-supervised tasks
- (1) rotation : \(\left\{0^{\circ}, 90^{\circ}, 180^{\circ}, 270^{\circ}\right\}\)
- (2) jigsaw : 4-way rotation prediction ( \(4 !=24\) )
- (3) colorization
- input : grayscale image
- output : pixel-wise classification ( on pre-defined color classes )
\(\rightarrow\) These self-supervised tasks were originally used to learn representations themselves, but in this work, we evaluate the representations using these tasks.
(2) Self-supervised DA policies
(1) Rand Augment ( = sampling-based strategy )
(2) Fast Auto Augment(FAA) ( = search-based strategy )
Notation
-
each transformation : \(\mathcal{O}\)
cutout, autoContrast, equalize, rotate, solarize, color, posterize, contrast, brightness, sharpnes, shear-x, shear-y, translate-x, translate-y, invert -
2 parameters of \(\mathcal{O}\) :
- (1) magnitude \(\lambda\)
- (2) probability of applying the transformation \(p\)
-
\(\mathcal{S}\) : set of augmentation sub-policies
-
subpolicy \(\tau \in \mathcal{S}\) : sequential application of \(N_{\tau}\) consecutive transformation
( \(\left\{\overline{\mathcal{O}}_{n}^{(\tau)}\left(x ; p_{n}^{(\tau)}, \lambda_{n}^{(\tau)}\right): n=1, \ldots, N_{\tau}\right\}\) for \(n=1, \ldots, N_{\tau})\)
- each operation is applied with prob \(p\)
-
a) SelfRandAugment
Assumption of RandAugment
-
all transformations share a single, discrete magnitude, \(\lambda \in[1,30]\)
-
all sub-policies apply the same number of transformations, \(N_{\tau}\)
-
all transformations are applied with uniform probability, \(p=K_{T}^{-1}\) for the \(K_{T}= \mid \mathbb{O} \mid\) transformations.
\(\rightarrow\) selects the best result from a grid seach over \(\left(N_{\tau}, \lambda\right)\)
Evaluate the searched \(\left(N_{\tau}, \lambda\right)\) State, using a self-supervised evaluation
- (1) rotation, (2) jigsaw, (3) colorization
\(\rightarrow\) SelfRandAugment
b) FAA algorithm
Notation
- \(\mathcal{D}\) : distribution on the data \(\mathcal{X}\)
- \(\mathcal{M}(\cdot \mid \theta): \mathcal{X}\) : model
- \(\mathcal{L}(\theta \mid D)\) : supervised loss
FAA (Fast AutoAugment)?
-
given pair of \(D_{\text {train }}\) and \(D_{\text {valid }}\), select augmentation policies that approximately align the density of \(D_{\text {train }}\) with the density of the augmented \(\mathcal{T}\left(D_{\text {valid }}\right)\).
-
split \(D_{\text {train }}\) into \(D_{\mathcal{A}}\) , \(D_{\mathcal{M}}\)
-
train the model with \(D_{\mathcal{A}}\)
-
determine the policy with \(D_{\mathcal{M}}\)
\(\rightarrow\) \(\mathcal{T}^{*}=\underset{\mathcal{T}}{\operatorname{argmin}} \mathcal{L}\left(\theta_{\mathcal{M}} \mid \mathcal{T}\left(D_{\mathcal{A}}\right)\right)\)
-
-
obtains final policy \(\mathcal{T}^{*}\) by exploring \(B\) candidate policies \(\mathcal{B}=\left\{\mathcal{T}_{1}, \ldots, \mathcal{T}_{B}\right\}\) with BayesOpt
-
Samples a sequence of sub-policies from \(S\)
-
adjuts the …
- (1) probabilities \(\left\{p_{1}, \ldots, p_{N_{\mathcal{T}}}\right\}\)
- (2) magnitudes \(\left\{\lambda_{1}, \ldots, \lambda_{N_{\mathcal{T}}}\right\}\)
to minimize \(\mathcal{L}(\theta \mid \cdot)\) on \(\mathcal{T}\left(D_{\mathcal{A}}\right)\)
-
-
top \(P\) policies from each data split are merged into \(\mathcal{T}^{*}\)
\(\rightarrow\) retrain using this policy on all training data to obtain the final network parameters \(\theta^{*}\)
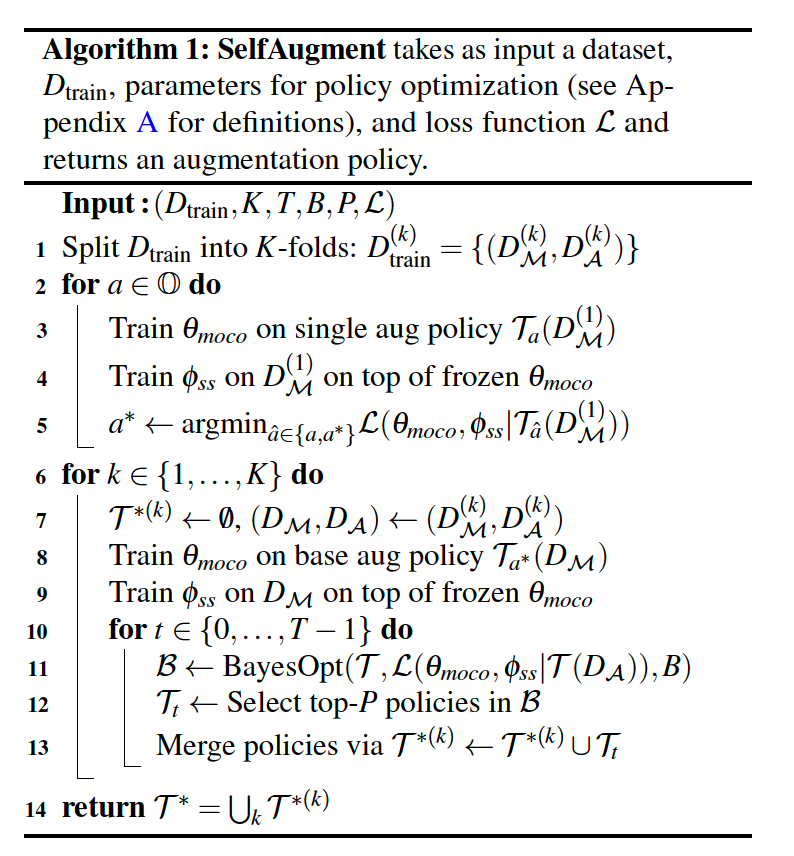
c) SelfAugment
SelfAugment = adapt the search-based FAA algorithm
[ 3 main differences from FAA ]
-
(1) Select the base policy
- (2) Search augmentation policies
- (3) Retrain MoCo using the full training dataset and augmentation policy