
Self-supervised Label Augmentation via Input Transformations
Contents
- Abstract
- Introduction
- Self-supervised Label Augmentation (SLA)
- Multi-task Learning with Self-supervision
- Eliminating Invariance via Joint-label Classifier
0. Abstract
self-supervised learning
- constructs artificial labels
This paper :
-
constructing artifical labels works well even under fully labeled datasets
-
main idea : learn a single unified task w.r.t joint distn of the (1) original labels & (2) self-supervised labels
( augment these 2 labels )
-
propose a novel knowledge transfser technique ( = self-distillation )
\(\rightarrow\) faster inference!
1. Introduction
Contribution
-
multi-task approach :
-
enforcing invariance to transformation
\(\rightarrow\) may lead to bad result in some cases
-
-
propose a simple & effective algorithm
- learn a single unified task
- use joint distribution of original & self-supervised labels
Self-supervised Label Augmentation (SLA)
-
proposed label augmentation method
-
do not force any invariance to tranfsormation
-
assign different labels for each transformation
\(\rightarrow\) possible to make a prediction by aggregation
( act as an ensemble )
-
propose a self-distillation technique
( transfers knowledge of the multiple inferences into a single inference )
2. Self-supervised Label Augmentation (SLA)
( setting : fully-supervised scenario )
-
problems of conventional multi-task learning approach
-
introduce proposed algorithm
( + 2 additional techniques : (1) aggregation & (2) self-distillation )
-
(1) aggregation :
-
uses all differently augmented samples
-
provide an ensemble effect, using a single model
-
-
(2) self-distillation :
- transfers the aggregated knowledge into the model itself for acceleration
-
Notation
- input : \(\boldsymbol{x} \in \mathbb{R}^d\)
- number of classes : \(N\)
- Cross entropy loss : \(\mathcal{L}_{\mathrm{CE}}\)
- softmax classifier : \(\sigma(\cdot ; \boldsymbol{u})\)
- \(\sigma_i(\boldsymbol{z} ; \boldsymbol{u})=\exp \left(\boldsymbol{u}_i^{\top} \boldsymbol{z}\right) / \sum_k \exp \left(\boldsymbol{u}_k^{\top} \boldsymbol{z}\right)\).
- embedding vector : \(\boldsymbol{z}=f(\boldsymbol{x} ; \boldsymbol{\theta})\)
- augmented sample : \(\tilde{\boldsymbol{x}}=t(\boldsymbol{x})\)
- embedding vector of augmented sample : \(\tilde{\boldsymbol{z}}=f(\tilde{\boldsymbol{x}} ; \boldsymbol{\theta})\)
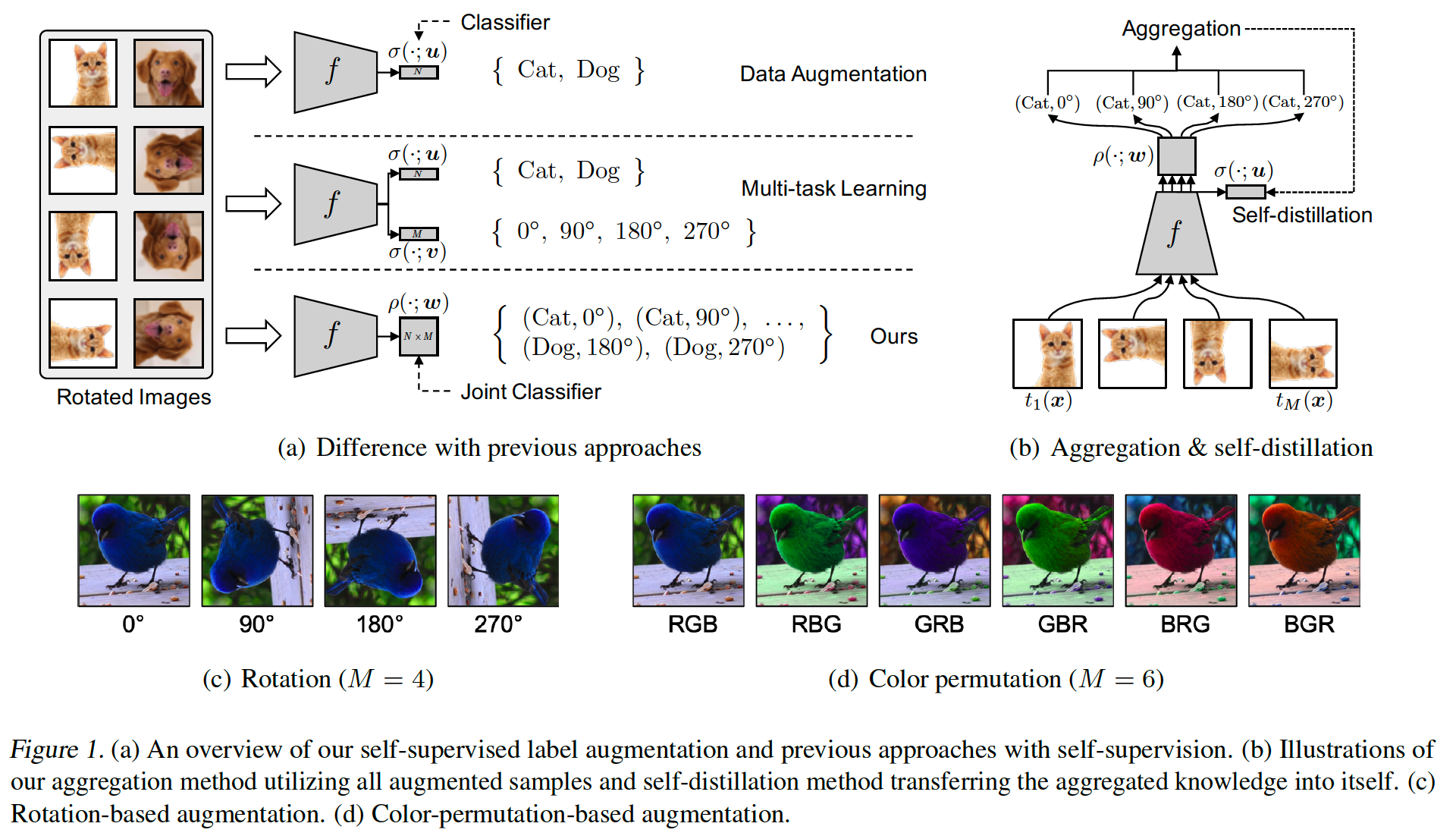
(1) Multi-task Learning with Self-supervision
transformation-based self-supervised learning
- learn to predict which transformation is applied
- usually use 2 losses (multi-task learning)
Loss function :
\(\begin{aligned} &\mathcal{L}_{\mathrm{MT}}(\boldsymbol{x}, y ; \boldsymbol{\theta}, \boldsymbol{u}, \boldsymbol{v}) =\frac{1}{M} \sum_{j=1}^M \mathcal{L}_{\mathrm{CE}}\left(\sigma\left(\tilde{\boldsymbol{z}}_j ; \boldsymbol{u}\right), y\right)+\mathcal{L}_{\mathrm{CE}}\left(\sigma\left(\tilde{\boldsymbol{z}}_j ; \boldsymbol{v}\right), j\right) \end{aligned}\).
- \(\left\{t_j\right\}_{j=1}^M\) : pre-defined transformations
- \(\tilde{\boldsymbol{x}}_j=t_j(\boldsymbol{x})\) : transformed sample by \(t_j\)
- \(\tilde{\boldsymbol{z}}_j=f\left(\tilde{\boldsymbol{x}}_j ; \boldsymbol{\theta}\right)\) : embedding
- \(\sigma(\cdot ; \boldsymbol{u})\) : classifier ( for primary task )
- \(\sigma(\cdot ; \boldsymbol{v})\) : classifier ( for self-supervised task )
\(\rightarrow\) forces the primary classifier to be invariant to transformation
LIMITATION
-
depending on the type of transformation….
\(\rightarrow\) might hurt performance!
-
ex) rotation … number 6 & 9
(2) Eliminating Invariance via Joint-label Classifier
-
remove the unnecessary INVARIANT propoerty of the classifier \(\sigma(f(\cdot) ; \boldsymbol{u})\)
-
instead, use a JOINT softmax classifier \(\rho(\cdot ; \boldsymbol{w})\)
- joint probability : \(P(i, j \mid \tilde{\boldsymbol{x}})=\rho_{i j}(\tilde{\boldsymbol{z}} ; \boldsymbol{w})=\exp \left(\boldsymbol{w}_{i j}^{\top} \tilde{\boldsymbol{z}}\right) / \sum_{k, l} \exp \left(\boldsymbol{w}_{k l}^{\top} \tilde{\boldsymbol{z}}\right)\)
-
Loss function : \(\mathcal{L}_{\mathrm{SLA}}(\boldsymbol{x}, y ; \boldsymbol{\theta}, \boldsymbol{w})=\frac{1}{M} \sum_{j=1}^M \mathcal{L}_{\mathrm{CE}}\left(\rho\left(\tilde{\boldsymbol{z}}_j ; \boldsymbol{w}\right),(y, j)\right)\)
- \(\mathcal{L}_{\mathrm{CE}}(\rho(\tilde{\boldsymbol{z}} ; \boldsymbol{w}),(i, j))=-\log \rho_{i j}(\tilde{\boldsymbol{z}} ; \boldsymbol{w})\).
-
only increases the number of labels
( number of additional parameters are very small )
-
\(\mathcal{L}_{\mathrm{MT}}\) and \(\mathcal{L}_{\mathrm{SLA}}\) :
-
consider the same set of multi-labels
Aggregated Inference
-
do not need to consider \(N \times M\) labels
( because we already know which transformation is applied )
-
make prediction using conditional probability
- \(P\left(i \mid \tilde{\boldsymbol{x}}_j, j\right)=\exp \left(\boldsymbol{w}_{i j}^{\top} \tilde{\boldsymbol{z}}_j\right) / \sum_k \exp \left(\boldsymbol{w}_{k j}^{\top} \tilde{\boldsymbol{z}}_j\right)\).
-
for all possible transformations…
- aggregate the conditonal probabilities!
- acts as an ensemble model
- \(P_{\text {aggregated }}(i \mid \boldsymbol{x})=\frac{\exp \left(s_i\right)}{\sum_{k=1}^N \exp \left(s_k\right)}\).
Self-distillation from aggregation
-
requires to compute \(\tilde{\boldsymbol{z}}_j=f\left(\tilde{\boldsymbol{x}}_j\right)\) for all \(j\)
\(\rightarrow\) \(M\) times higher computation cost than single inference
-
Solution : perform self-distillation
-
from ) aggregated knowledge \(P_{\text {aggregated }}(\cdot \mid \boldsymbol{x})\)
-
to ) another classifier \(\sigma(f(\boldsymbol{x} ; \boldsymbol{\theta}) ; \boldsymbol{u})\)
\(\rightarrow\) can maintain the aggregated knowledge, using only \(\boldsymbol{z}=f(\boldsymbol{x})\)
-
-
objective function :
\[\begin{aligned} \mathcal{L}_{\mathrm{SLA}+\mathrm{SD}}(\boldsymbol{x}, y ; \boldsymbol{\theta}, \boldsymbol{w}, \boldsymbol{u})=& \mathcal{L}_{\mathrm{SLA}}(\boldsymbol{x}, y ; \boldsymbol{\theta}, \boldsymbol{w}) \\ &+D_{\mathrm{KL}}\left(P_{\text {aggregated }}(\cdot \mid \boldsymbol{x}) \mid \mid \sigma(\boldsymbol{z} ; \boldsymbol{u})\right) \\ &+\beta \mathcal{L}_{\mathrm{CE}}(\sigma(\boldsymbol{z} ; \boldsymbol{u}), y) \end{aligned}\]