
13. Deriving Machine Attention from Human Rationales (2018)
목차
- Abstract
- Introduction
- Related Work
- Method
- Multi-task Learning
- Domain-invariant encoder
- Attention generation
- Pipeline
Abstract
Attention based models are widely used in NLP
In this paper, show that even in low-resource scenario, attention can be learned effectively
Start with discrete human annotated rationales and map them into continuous attention
1. Introduction
Propose an approach to “map human rationales to high-performing attention”
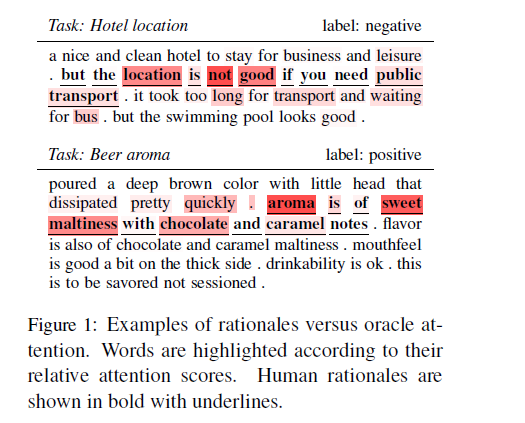
Machine-generated attention should mimic human rationales.
But, rationales on their own are NOT adequate substitutes for attention!
( \(\because\) instead of soft distn, human rationales only provide binary indication )
Propose R2A ( mapping from rationales \(\rightarrow\) attention )
- generalizable across tasks!
Consists of three components
- 1) attention-based model
- 2) domain-invariant representation
- 3) combine invariant representation & rationales
\(\rightarrow\) trained jointly to optimize the overall objective!
2. Related Work
-
1) Attention-based models
-
2) Rationale-based models
-
3) Transfer learning
-
transfer the knowledge by either
(1) fine-tuning an encoder (trained on source tasks)
(2) multi-task learning on all tasks (with shared encoder)
-
3. Method
(1) Problem formulation
-
Source Task ( \(\left\{\mathcal{S}_{i}\right\}_{i=1}^{N}\) ) : sufficient label
-
Target Task ( \(\mathcal{T}\) ) : scarce label
(2) Overview
-
Goal : improve classification performance on target tasks by learning a mapping from R2A
-
view R2A mapping as a meta model, that produces PRIOR over the attention distn
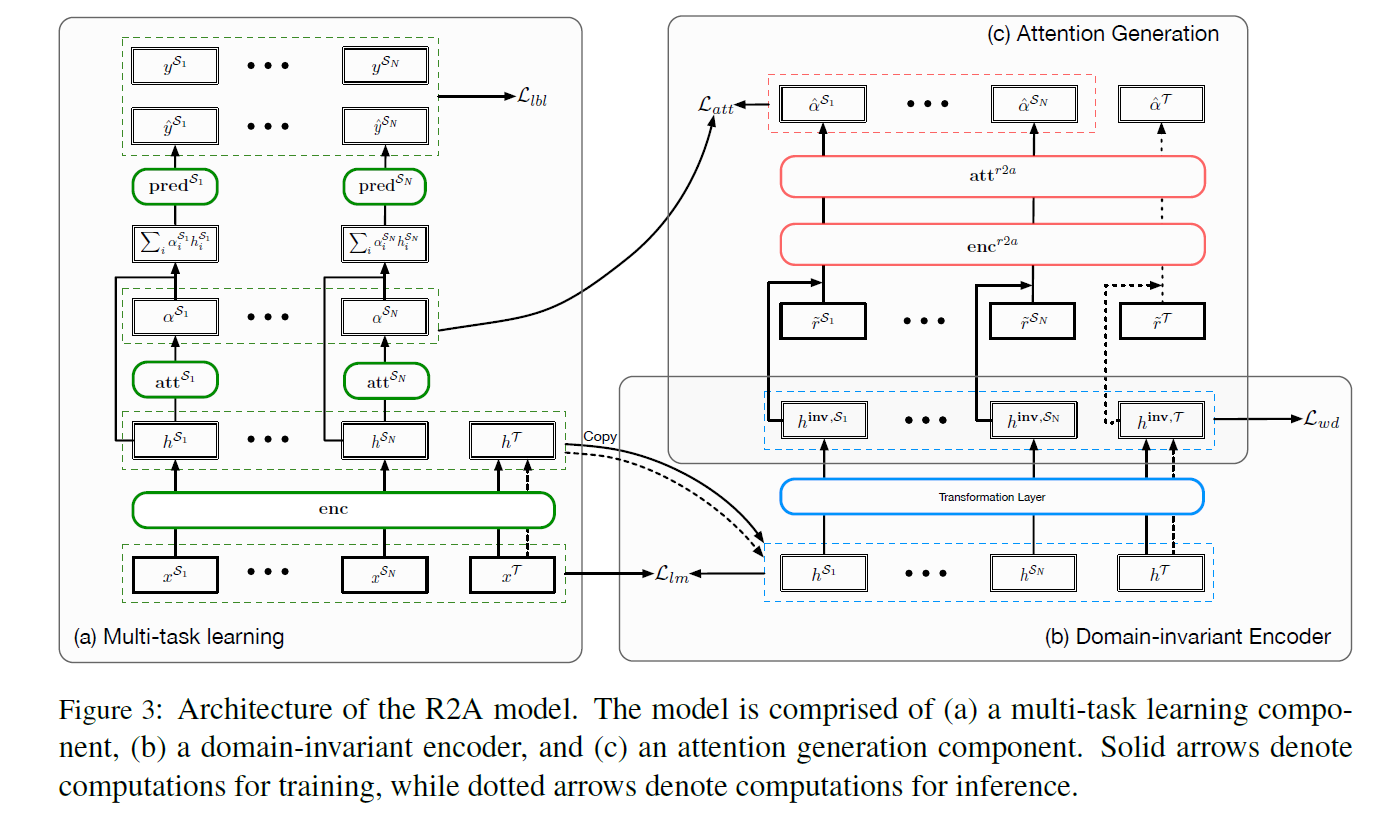
(3) Model Architecture
- Multi-task Learning
- generated high-quality attention as an intermediate result
- Domain-invariant encoder
- transform the contextualized representation (which is obtained from first module) into domain-invariant version
- Attention generation
- predict the intermediate attention, obtained from the first module
3-1. Multi-task Learning
Goal : learn good attention for each source task
Notation : \(\left(x^{t}, y^{t}\right)\) = training instance, from any source task \(t \in\left\{\mathcal{S}_{1}, \ldots \mathcal{S}_{N}\right\}\).
Step
- step 1) encode the input sequence \(x^{t}\) into hidden states : \(h^{t}=\operatorname{enc}\left(x^{t}\right)\)
- enc : bi-directional LSTM
- \(h_{i}^{t}\) encodes the content and context information of the word \(x_{i}^{t}\)
- step 2) pass \(h^{t}\) on to a task-specific attention module & produce attention \(\alpha^{t}=\operatorname{att}^{t}\left(h^{t}\right)\)
- \(\begin{aligned} \tilde{h}_{i}^{t} &=\tanh \left(W_{\text {att }}^{t} h_{i}^{t}+b_{\text {att }}^{t}\right) \\ \alpha_{i}^{t} &=\frac{\exp \left(\left\langle\tilde{h}_{i}^{t}, q_{\text {att }}^{t}\right\rangle\right)}{\sum_{j} \exp \left(\left\langle\tilde{h}_{j}^{t}, q_{\mathbf{a t t}}^{t}\right\rangle\right)} \end{aligned}\).
- step 3) predict label of \(x^t\)
- using weighted sum of its contextualized representation
- \(\hat{y}^{t}=\operatorname{pred}^{t}\left(\sum_{i} \alpha_{i}^{t} h_{i}^{t}\right)\).
Train this module to minimize the loss \(\mathcal{L}_{l b l}\) ( loss between prediction & annotated label )
3-2. Domain-invariant encoder
This module has 2 goals
- 1) learning a general encoder for both (1) source & (2) target corpora
- 2) learning domain-invariant representation
Notation
- \(x\) : input sequence
- \(h \triangleq[\vec{h} ; \overleftarrow{h}]\) : contextualized representation obtained from encoder
In order to support transfer, encoder should be GENERAL enough to represent both (1) source & (2) target corpora
Representation \(h\) is domain-specific.
Thus, apply transformation layer to obtain invariant representation!
- \(h_{i}^{\mathrm{inv}}=W_{\mathrm{inv}} h_{i}+b_{\mathrm{inv}}\).
Training objective :
- \(\begin{array}{rl} \mathcal{L}_{w d}=\sup _{ \mid \mid f \mid \mid _{L} \leq K} & \mathbb{E}_{h^{\text {inv }} \sim \mathbb{P}_{\mathcal{S}}}\left[f\left(\left[h_{1}^{\text {inv }} ; h_{L}^{\text {inv }}\right]\right)\right] -\mathbb{E}_{h^{\operatorname{inv}} \sim \mathbb{P}_{\mathcal{T}}}\left[f\left(\left[h_{1}^{\text {inv }} ; h_{L}^{\text {inv }}\right]\right)\right] \end{array}\).
3-3. Attention generation
Goal : generate high-quality attention for each task
\(r^t\) : task-specific rationales, corresponding to the input text \(x^t\)
Algorithm :
\(\begin{aligned} u^{t} &=\operatorname{enc}^{r 2 a}\left(\left[h^{\operatorname{inv}, t} ; \tilde{r}^{t}\right]\right) \\ \tilde{u}_{i}^{t} &=\tanh \left(W_{\mathbf{a t t}}^{r 2 a} u_{i}^{t}+b_{\mathbf{a t t}}^{r 2 a}\right), \\ \hat{\alpha}_{i}^{t} &=\frac{\exp \left(\left\langle\tilde{u}_{i}^{t}, q_{\mathbf{a t t}}^{r 2 a}\right\rangle\right)}{\sum_{j} \exp \left(\left\langle\tilde{u}_{j}^{t}, q_{\mathbf{a t t}}^{r 2 a}\right\rangle\right)} \end{aligned}\).
Minimize the distance between \(\hat{\alpha}^{t}\) and the \(\alpha^{t}\)
-
( \(\alpha^{t}\) = obtained from first multi-task learning module )
-
\(\mathcal{L}_{a t t}=\sum_{\left(\alpha^{t}, \hat{\alpha}^{t}\right), t \in\left\{\mathcal{S}_{i}\right\}_{i=1}^{N}} \mathrm{~d}\left(\alpha^{t}, \hat{\alpha}^{t}\right)\).
where \(\mathrm{d}(a, b) \triangleq \max (0,1-\cos (a, b)-0.1)\).
3-4. Pipeline
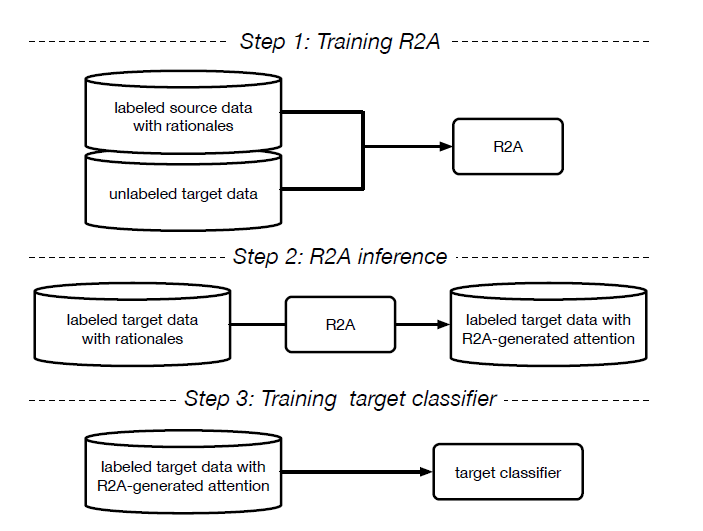
(1) Training R2A
- overall objective function : \(\mathcal{L}=\mathcal{L}_{l b l}+\lambda_{a t t} \mathcal{L}_{a t t}+\lambda_{l m} \mathcal{L}_{l m}+\lambda_{w d} \mathcal{L}_{w d}\).
(2) R2A inference
- after training R2A, generate attention for each labeld target
(3) Training target classifier
- when testing, neither provided with labels, nor rationales
- minimize prediction loss \(\mathcal{L}_{l b l}^{\mathcal{T}}\) & cosine-distance \(\mathcal{L}_{a t t}^{\mathcal{T}}\)
- objective of target classifier : \(\mathcal{L}=\mathcal{L}_{l b l}^{\mathcal{T}}+\lambda_{a t t}^{\mathcal{T}} \mathcal{L}_{a t t}^{\mathcal{T}}\).