
[Paper Review] 26. Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks
Contents
- Abstract
- Introduction
- Related Work
- Image-to-Image Translation
- Unpaired Image-to-Image Translation
- Cycle Consistency
- Neural Style Transfer
- Formulation
- Adversarial Loss
- Cycle Consistency Loss
- Full Objective
0. Abstract
image-to-image translation
- learn the mapping between “input image” & “output image”
- ex) pix2pix
HOWEVER, for many tasks, paired training data will not be available
Goal :
-
learn a mapping \(G\) : \(X \rightarrow Y\)
such that, the distn of images from \(G(X)\) is indistinguishable from distn \(Y\)
-
couple it with an inverse mapping \(F : Y \rightarrow X\)
-
introduce a cycle consistency loss to enforce \(F(G(X)) \approx X\)
1. Introduction
seek an algorithm, that can learn to translate between domains,
WITHOUT paired input-output examples
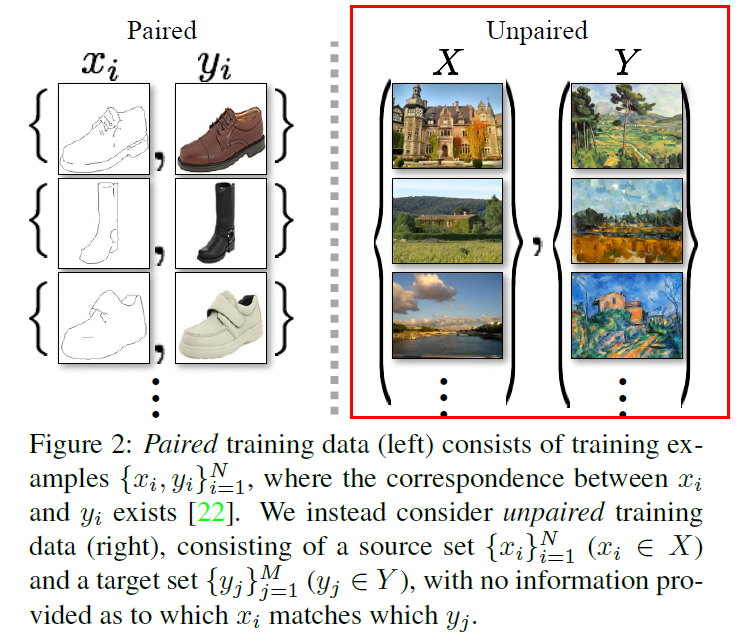
although lack supervision in the form of paired examples..
still have supervision at the level of setes!
- given one “set” of images in domain \(X\)
- and a different “set” in domain \(Y\)
Train a mapping \(G : X \rightarrow Y\)
- such that \(\hat{y} = G(x)\) is indistinguishable from images \(y \in Y\)
- induce a output distn over \(\hat{y}\), that matches the empirical distn \(p_{data}(y)\)
Optimal \(G\)
- translates the domain \(X\) to a domain \(\hat{Y}\) distn identically to \(Y\)
BUT problem : mode collapse
Solution :
-
exploit the property that translation should be “cycle consistent”
( = should arrive back! )
-
[mathematically]
- if we have translator \(G : X \rightarrow Y\)
- and another translator \(F : Y \rightarrow X\)
- \(G\) and \(F\) should be inverses of each other
-
add a cycle consistency loss that encourages..
- \(F(G(x)) \approx x\) and \(G(F(y)) \approx y\)
2. Related Work
1) Image-to-Image Translation
-
our approach builds upon “pix2pix”
( use conditional adversarial network )
2) Unpaired Image-to-Image Translation
-
relate two data domains : \(X\) & \(Y\)
-
does not rely on any task-specific, predefined similarity function between input & output
\(\rightarrow\) general-purpose solution
3) Cycle Consistency
- “back translation and reconciliation”
4) Neural Style Transfer
- one way to perform image-to-image translation
- combine..
- 1) content of one image
- 2) with the style of another image
- BUT primary focus of CycleGAN :
- mapping between image collections, rather than between two specific images
3. Formulation
Goal : learn mapping function between two domains \(X\) & \(Y\)
- training samples :
- \(\left\{x_{i}\right\}_{i=1}^{N}\) where \(x_{i} \in X\)
- \(\left\{y_{j}\right\}_{j=1}^{M}\) where \(y_{j} \in Y\)
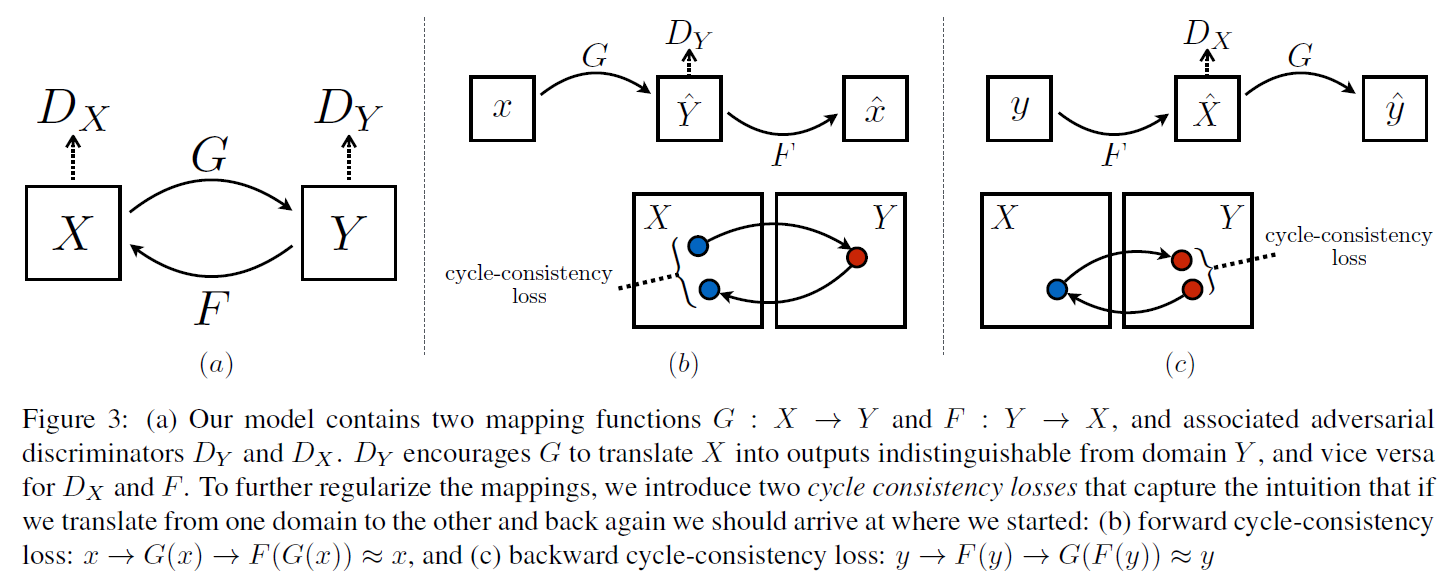
- two mappings :
- \(G: X \rightarrow Y\).
- \(F: Y \rightarrow X\).
- introduce 2 adversarial discriminators \(D_X\) and \(D_Y\)
- \(D_{X}\) : distinguish between images \(\{x\}\) and translated images \(\{F(y)\}\)
- \(D_{Y}\) : discriminate between \(\{y\}\) and \(\{G(x)\}\)
- two terms in objective
- 1) adversarial losses
- 2) cycle consistency losses
1) Adversarial Loss
a) for mapping \(G\)…
- \[\mathcal{L}_{\mathrm{GAN}}\left(G, D_{Y}, X, Y\right) =\mathbb{E}_{y \sim p_{\text {data }}(y)}\left[\log D_{Y}(y)\right] +\mathbb{E}_{x \sim p_{\text {data }}(x)}\left[\log \left(1-D_{Y}(G(x))\right]\right.\]
b) for mapping \(F\)…
- introduce similar loss for mapping \(F\)
2) Cycle Consistency Loss
Adversarial Loss ALONE cannot guarantee, that the learned function
can map an individual input \(x_i\) to desired output \(y_i\)
Learned mapping should be “cycle-consistent”
- 1) Forward Cycle Consistency
- \(x \rightarrow G(x) \rightarrow F(G(x)) \approx x\).
- 2) Backward Cycle Consistency
- \(y \rightarrow F(y) \rightarrow G(F(y)) \approx y\).
Cycle Consistency Loss :
- \(\mathcal{L}_{\text {cyc }}(G, F) =\mathbb{E}_{x \sim p_{\text {data }}(x)}\left[ \mid \mid F(G(x))-x \mid \mid _{1}\right] +\mathbb{E}_{y \sim p_{\text {data }}(y)}\left[ \mid \mid G(F(y))-y \mid \mid _{1}\right]\).
3) Full Objective
Final Objective :
- \(\begin{aligned} \mathcal{L}\left(G, F, D_{X}, D_{Y}\right) &=\mathcal{L}_{\mathrm{GAN}}\left(G, D_{Y}, X, Y\right) \\ &+\mathcal{L}_{\mathrm{GAN}}\left(F, D_{X}, Y, X\right) \\ &+\lambda \mathcal{L}_{\mathrm{cyc}}(G, F) \end{aligned}\).
Thus, aim to solve..
- \(G^{*}, F^{*}=\arg \min _{G, F} \max _{D_{x}, D_{Y}} \mathcal{L}\left(G, F, D_{X}, D_{Y}\right)\).
Can be viewed as training two “autoencoders” ! Learn
- one autoencoder \(F \circ G: X \rightarrow\) \(X\)
- jointly with another \(G \circ F: Y \rightarrow Y\)