
[Paper Review] 27. Toward Multimodal Image-to-Image Translation
Contents
- Abstract
- Introduction
- Related Work
- Image-to-Image Translation
- Unpaired Image-to-Image Translation
- Cycle Consistency
- Neural Style Transfer
- Formulation
- Adversarial Loss
- Cycle Consistency Loss
- Full Objective
0. Abstract
single input image may correspond to MULTIPLE possible outputs
\(\rightarrow\) aim to model a distribution of possible outputs in a conditional generative modeling setting
1. Introduction
common problem in existing methods : mode collapse
- this paper solves this!
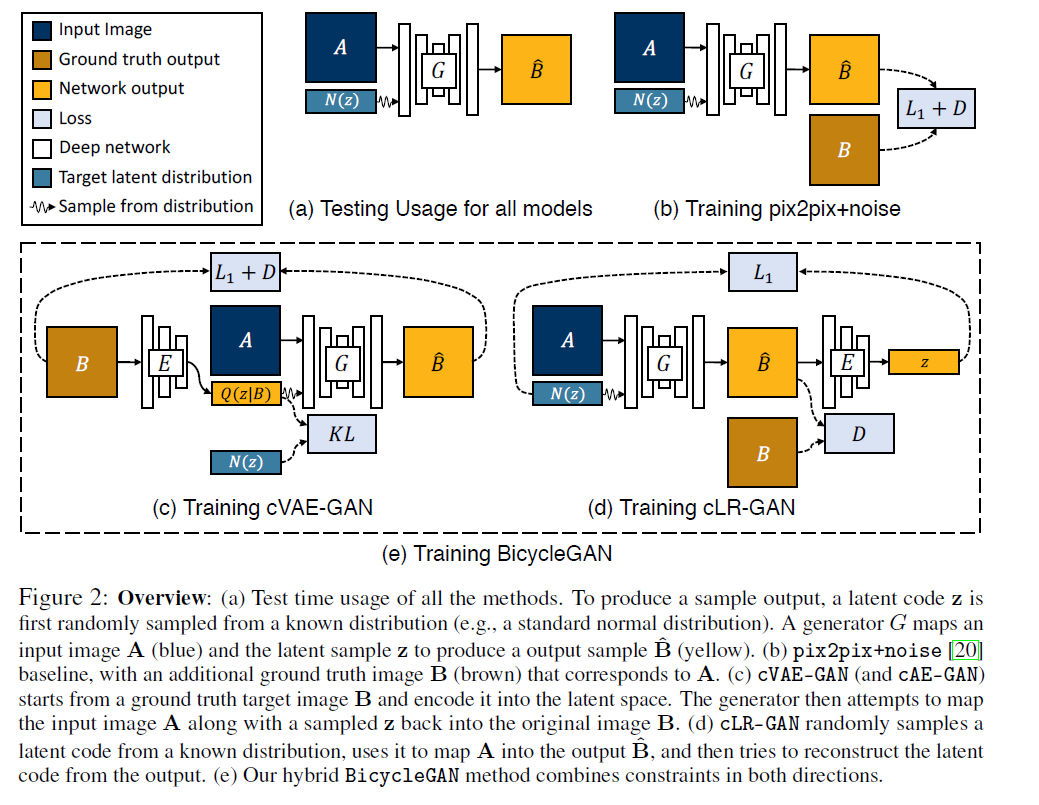
Starts with pix2pix framework
- trains a \(G\), conditioned on the input image, with 2 losses
- 1) regression loss : to produce similar output to the known paired ground truth image
- 2) learned discriminator loss : to encourage realism
propose encouraging a bijection between the output & latent space
Explore several objective functions!
- 1) cVAE-GAN ( Conditional Variational Autoencoder GAN)
- encoding the “ground truth image” to “latent space”
- along with “input image”, the generator should be able to reconstruct the specific output image
- 2) cLR-GAN ( Conditional Latent Regressor GAN )
- first, provide a randomly drawn latent vector
- encoder then attempts to recover the latent vector from the output image
- 3) BicycleGAN
- combine 1) & 2)
2. Related Works
3. Multimodal Image-to-Image Translation
Goal : learn a multi-modal mapping, between 2 image domains
-
input domain : \(\mathcal{A} \subset \mathrm{R}^{H \times W \times 3}\)
-
output domain : \(\mathcal{B} \subset \mathbb{R}^{H \times W \times 3}\)
-
given a dataset of paired instances from these domains
( = representative of joint dinst \(p(A,B)\) )
-
should be able to generate a diverse set of output \(\widehat{B}\) ‘s
( first discuss a simple extension of existing methods )
1) Baseline : pix2pix + noise ( \(z \rightarrow \hat{\mathbf{B}}\) )
- conditional adversarial networks
- randomly drawn noise \(z\) is added for stochasticity
- Loss Function :
- 1) \(\mathcal{L}_{\mathrm{GAN}}(G, D)=\mathbb{E}_{\mathbf{A}, \mathbf{B} \sim p(\mathbf{A}, \mathbf{B})}[\log (D(\mathbf{A}, \mathbf{B}))]+\mathbb{E}_{\mathbf{A} \sim p(\mathbf{A}), \mathbf{z} \sim p(\mathbf{z})}[\log (1-D(\mathbf{A}, G(\mathbf{A}, \mathbf{z})))]\).
- 2) \(\mathcal{L}_{1}^{\text {image }}(G)=\mathbb{E}_{\mathbf{A}, \mathbf{B} \sim p(\mathbf{A}, \mathbf{B}), \mathbf{z} \sim p(\mathbf{z})} \mid \mid \mathbf{B}-G(\mathbf{A}, \mathbf{z}) \mid \mid _{1}\).
- Final Loss Function :
- \(G^{*}=\arg \min _{G} \max _{D} \quad \mathcal{L}_{\mathrm{GAN}}(G, D)+\lambda \mathcal{L}_{1}^{\mathrm{image}}(G)\).
2) Conditional Variational Autoencoder GAN : cVAE-GAN \((\mathrm{B} \rightarrow \mathrm{z} \rightarrow \widehat{\mathrm{B}})\)
- one way to force \(z\) to be “useful” :
- directly map ground truth \(B\) to \(z\), using encoding function \(E\)
- \(G\) uses both (1) latent code & (2) input image \(A\)
- to make a desired output \(\hat{\mathbf{B}}\)
- Loss Function
- 1) \(\mathcal{L}_{\mathrm{GAN}}^{\mathrm{VAE}}=\mathbb{E}_{\mathbf{A}, \mathbf{B} \sim p(\mathbf{A}, \mathbf{B})}[\log (D(\mathbf{A}, \mathbf{B}))]+\mathbb{E}_{\mathbf{A}, \mathbf{B} \sim p(\mathbf{A}, \mathbf{B}), \mathbf{z} \sim E(\mathbf{B})}[\log (1-D(\mathbf{A}, G(\mathbf{A}, \mathbf{z})))]\).
- 2) \(\mathcal{L}_{1}^{\mathrm{VAE}}(G)=\mathbb{E}_{\mathbf{A}, \mathbf{B} \sim p(\mathbf{A}, \mathbf{B}), \mathbf{z} \sim E(\mathbf{B})} \mid \mid \mathbf{B}-G(\mathbf{A}, \mathbf{z}) \mid \mid _{1}\).
- 3) \(\mathcal{L}_{\mathrm{KL}}(E)=\mathbb{E}_{\mathbf{B} \sim p(\mathbf{B})}\left[\mathcal{D}_{\mathrm{KL}}(E(\mathbf{B}) \mid \mid \mathcal{N}(0, I))\right]\).
- Final Loss Function :
- \(G^{*}, E^{*}=\arg \min _{G, E} \max _{D} \quad \mathcal{L}_{\mathrm{GAN}}^{\mathrm{VAE}}(G, D, E)+\lambda \mathcal{L}_{1}^{\mathrm{VAE}}(G, E)+\lambda_{\mathrm{KL}} \mathcal{L}_{\mathrm{KL}}(E)\).
3) Conditional Latent Regressor GAN : cLR-GAN \((\mathbf{z} \rightarrow \widehat{\mathbf{B}} \rightarrow \widehat{\mathbf{Z}})\)
- enforce \(G\) to use \(z\), while staying close to the actual test time distn \(p(z)\)
- Loss Function
- 1) \(\mathcal{L}_{\mathrm{GAN}}(G, D)=\mathbb{E}_{\mathbf{A}, \mathbf{B} \sim p(\mathbf{A}, \mathbf{B})}[\log (D(\mathbf{A}, \mathbf{B}))]+\mathbb{E}_{\mathbf{A} \sim p(\mathbf{A}), \mathbf{z} \sim p(\mathbf{z})}[\log (1-D(\mathbf{A}, G(\mathbf{A}, \mathbf{z})))]\).
- 2) \(\mathcal{L}_{1}^{\text {latent }}(G, E)=\mathbb{E}_{\mathbf{A} \sim p(\mathbf{A}), \mathbf{z} \sim p(\mathbf{z})} \mid \mid \mathbf{z}-E(G(\mathbf{A}, \mathbf{z})) \mid \mid _{1}\)
- Final Loss Function :
- \(G^{*}, E^{*}=\arg \min _{G, E} \max _{D} \quad \mathcal{L}_{\mathrm{GAN}}(G, D)+\lambda_{\text {latent }} \mathcal{L}_{1}^{\text {latent }}(G, E)\).
4) Our Hybrid Model : BicycleGAN
combine “cVAE-GAN” & “cLR-GAN” objectives!
\(\begin{aligned} G^{*}, E^{*}=\arg \min _{G, E} \max _{D} & \mathcal{L}_{\mathrm{GAN}}^{\mathrm{VAE}}(G, D, E)+\lambda \mathcal{L}_{1}^{\mathrm{VAE}}(G, E) \\ &+\mathcal{L}_{\mathrm{GAN}}(G, D)+\lambda_{\text {latent }} \mathcal{L}_{1}^{\text {latent }}(G, E)+\lambda_{\mathrm{KL}} \mathcal{L}_{\mathrm{KL}}(E) \end{aligned}\).