Diffusion-based TS Imputation and Forecasting with SSSM
Contents
- Abstract
- Introduction
- SSSD models for TS imputation
- TS imputation
- Diffusion models
- State space models
- Proposed approaches
0. Abstract
Imputation of missing values
Proposes SSSD
- Imputation model
- relies on 2 emerging technologies
- (1) (conditional) Diffusion models … as generative model
- (2) Structured state space models (SSSM) ….. as internal model architecture
- suited to capture long-term dependencies in TS
Experiment : “probabilistic” imputation and forecasting
1. Introduction
Focus on TS as a data modality, where missing data is particularly prevalent
Different missingness scenarios
- ex) TS forecasting = missingness at the end of sequence ( = future )
“PROBABILISTIC” imputation methods
- single imputation (X)
- samples of different plausible imputations (O)
TS imputation
Review : (Osman et al., 2018)
- Statistical methods (Lin & Tsai, 2020)
- AR models (Atyabi et al., 2016; Bashir & Wei, 2018)
- Generative models
However, many existing models remain limited to the RM (random missing) scenario
This paper : Address these shortcomings,
- by proposing a new GENERATIVE-model-based approach for TS imputation.
Details:
- (1) Diffusion Models
-
(2) Structured State Space Models
( instead of dilated CNN, transformer layers )
- particularly suited to handling long-term-dependencies
Contributions
- Combination of
- SSM as ideal building blocks to capture long-term dependencies
- (Conditional) diffusion models for generative modeling
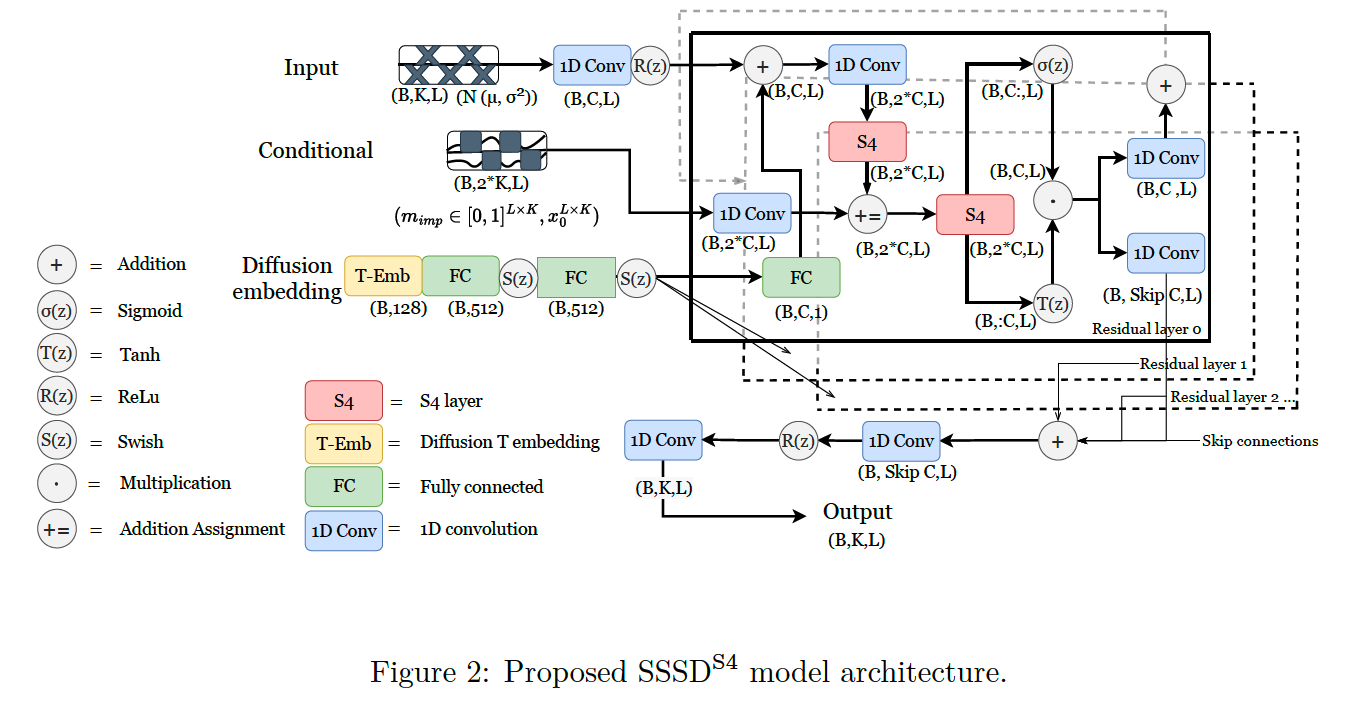
- Modifications to the contemporary diffusion model architecture DiffWave
- Experiments
2. Structured state space diffusion (SSSD) models for time series imputation
(1) TS imputation
Notation
- \(x_0\) : data sample with shape \(\mathbb{R}^{L \times K}\)
- Imputation targets : specified in terms of binary masks
- i.e., \(m_{\mathrm{imp}} \in\{0,1\}^{L \times K}\),
- 1 = condition
- 0 = target to be imputed
- if missing value also in the input … additionally requires a mask \(m_{\mathrm{mvi}}\)
- i.e., \(m_{\mathrm{imp}} \in\{0,1\}^{L \times K}\),
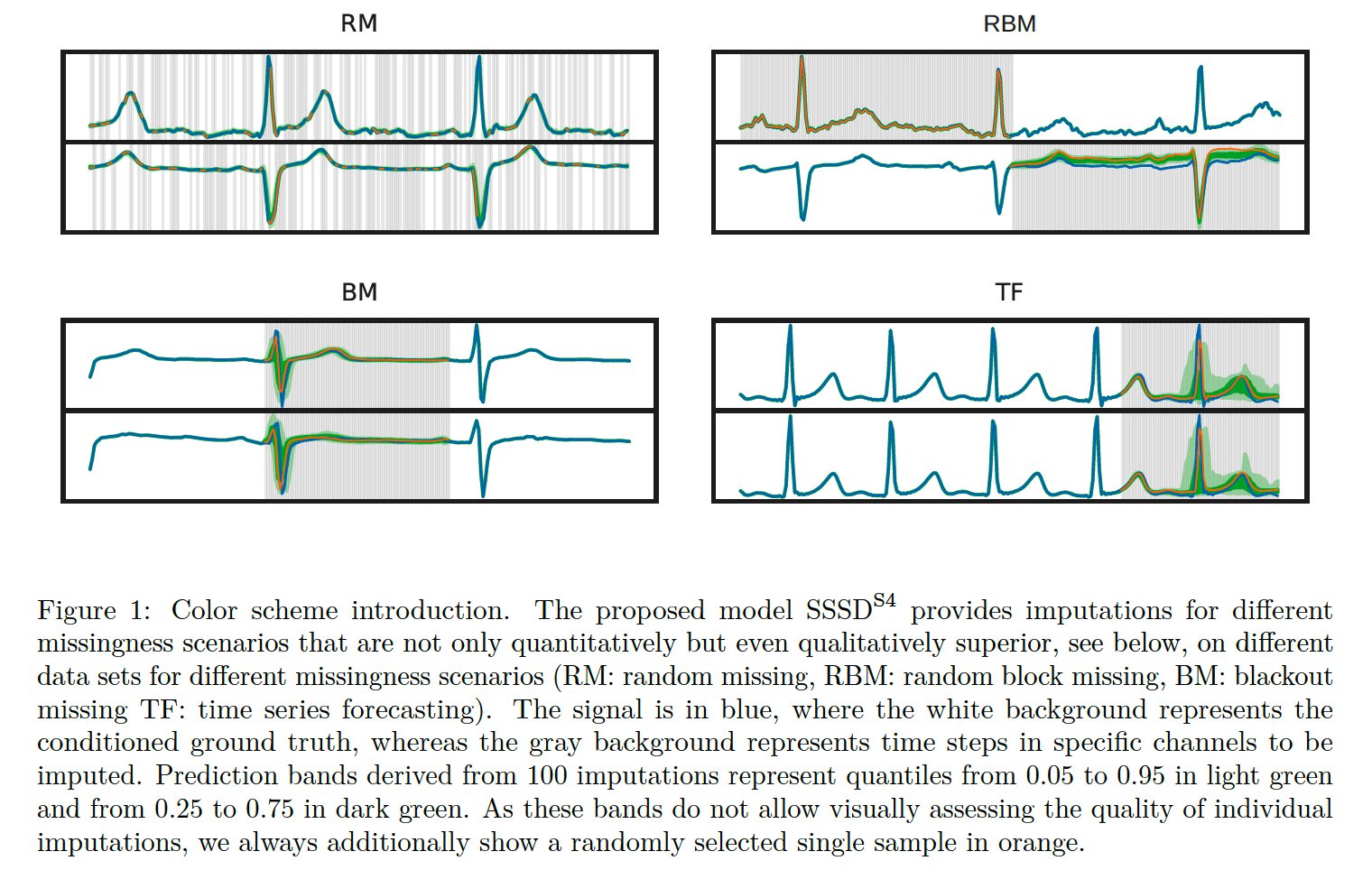
Missingness scenarios
- MCAR : missing completely at random ( THIS PAPER )
- missingness pattern does not depend on feature values
- MAR : missing at random
- may depend on observed features
- RBM : random block missing
- may depend also on ground truth values of the features to be imputed
Random missing (RM)
- zero-entries of \(m_{\mathrm{imp}}\) are sampled randomly
- thie paper : consider single time steps for RM instead of blocks of consecutive time steps.
(2) Diffusion models
Learn a mapping from a latent space to the original signal space,
by learning to remove noise in a backward process that was added sequentially in a Markovian fashion during forward process
[ UNconditional case ]
Forward Process
\(q\left(x_1, \ldots, x_T \mid x_0\right)=\prod_{t=1}^T q\left(x_t \mid x_{t-1}\right)\).
- where \(q\left(x_t \mid x_{t-1}\right)=\mathcal{N}\left(\sqrt{1-\beta_t} x_{t-1}, \beta_t \mathbb{1}\right)\left[x_t\right]\)
-
\(\beta_t\) = noise level (fixed or learnable)
( ex. 0.0001 )
-
\(\begin{aligned} \mathbf{x}_t & =\sqrt{\alpha_t} \mathbf{x}_{t-1}+\sqrt{1-\alpha_t} \epsilon_{t-1} \\ & =\sqrt{\alpha_t \alpha_{t-1}} \mathbf{x}_{t-2}+\sqrt{1-\alpha_t \alpha_{t-1}} \bar{\epsilon}_{t-2} \\ & =\ldots \\ & =\sqrt{\bar{\alpha}_t} \mathbf{x}_0+\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon} \end{aligned}\).
-
where \(\alpha_t=1-\beta_t\) and \(\bar{\alpha}_t=\prod_{i=1}^t \alpha_i\)
( + we know \(\beta_t\) in advance! )
\(q\left(\mathbf{x}_t \mid \mathbf{x}_0\right) = \mathcal{N}\left(\mathbf{x}_t ; \sqrt{\bar{\alpha}_t} \mathbf{x}_0,\left(1-\bar{\alpha}_t\right) \mathbf{I}\right)\).
Backward Process
\(p_\theta\left(x_0, \ldots, x_{t-1} \mid x_T\right)=p\left(x_T\right) \prod_{t=1}^T p_\theta\left(x_{t-1} \mid x_t\right)\).
- where \(x_T \sim \mathcal{N}(0, \mathbb{1})\).
- \(p_\theta\left(x_{t-1} \mid x_t\right)\) = assumed as normal-distributed (with diagonal covariance matrix)
Under particular parametrization of \(p_\theta\left(x_{t-1} \mid x_t\right)\) ….
Reverse process can be trained using …
\(L=\min _\theta \mathbb{E}_{x_0 \sim \mathcal{D}, \epsilon \sim \mathcal{N}(0, \mathbb{1}), t \sim \mathcal{U}(1, T)} \mid \mid \epsilon-\epsilon_\theta\left(\sqrt{\alpha_t} x_0+\left(1-\alpha_t\right) \epsilon, t\right) \mid \mid _2^2\).
-
\(\epsilon_\theta\left(x_t, t\right)\) : parameterized using a NN
( = score-matching techniques )
-
can be seen as a weighted variational bound on the NLL that down-weights the importance of terms at small \(t\), i.e., at small noise levels.
[ Conditional case ]
Backward process is conditioned on additional information
- i.e. \(\epsilon_\theta=\epsilon_\theta\left(x_t, t, c\right)\),
Condition?
= the concatenation of input & imputation mask
- i.e., \(c=\operatorname{Concat}\left(x_0 \odot\left(m_{\mathrm{imp}} \odot m_{\mathrm{mvi}}\right),\left(m_{\mathrm{imp}} \odot m_{\mathrm{mvi}}\right)\right)\),
- \(m_{\mathrm{imp}}\) : imputation mask
- \(m_{\mathrm{mvi}}\) : missing value mask
2 different setups
-
\(D_0\) : apply the diffusion process to the full signal
-
\(D_1\) : apply the diffusion process to the regions to be imputed only
( Still, evaluation of the loss function is only supposed to be on the input values for which ground truth information is available, i.e., where \(m_{\mathrm{mvi}}=1\). )
(3) State space models (SSM)
Linear state space transition equation
-
connecting a 1-D input \(u(t)\) to a 1-d output \(y(t)\)
via a \(N\)-D hidden state \(x(t)\).
-
\(x^{\prime}(t)=A x(t)+B u(t) \text { and } y(t)=C x^{\prime}(t)+D u(t)\).
Relation between input & output
= can be written as a convolution operation
Ability to capture long-term dependencies
= relates to a particular initialization of \(A \in \mathbb{R}^{N \times N}\) according to HiPPO theory
(4) Proposed approaches