
4. Graph Convolutional Networks
GCN : to generalize convolutions to graph domains
4-1. Spectral Methods
SPECTRAL representation of graphs
4 classic models
- (1) Spectral Network
- (2) Chebnet
- (3) GCN
- (4) AGCN
4-1-1. Spectral Network
-
convolution operation in Fourier domain
( by computing eigendecomposition of graph Laplacian )
-
Convolution Operation
- multiplication of “signal” & “filter”
- signal : \(\mathbf{x} \in \mathbb{R}^{N}\)
- filter : \(\mathrm{g}_{\theta}=\operatorname{diag}(\boldsymbol{\theta})\) ( parameterized by \(\mathrm{g}_{\theta}=\operatorname{diag}(\boldsymbol{\theta})\) )
- \(\mathbf{g}_{\theta} \star \mathbf{x}=\mathbf{U g}_{\theta}(\Lambda) \mathbf{U}^{T} \mathbf{x}\).
- \(\mathrm{U}\) : matrix of eigenvectors of \(\mathbf{L}\)
- \(\mathbf{L}=\mathbf{I}_{N}- \mathbf{D}^{-\frac{1}{2}} \mathbf{A} \mathbf{D}^{-\frac{1}{2}}=\mathbf{U} \Lambda \mathbf{U}^{T}\).
- \(\mathrm{U}\) : matrix of eigenvectors of \(\mathbf{L}\)
- multiplication of “signal” & “filter”
-
Limitations
- (1) intense computation
- (2) non-spatially localized filters
4-1-2. ChebNet
Approximate \(\mathbf{g}_{\theta}(\Lambda)\), by a TRUNCATED expansion,
in terms of Chebyshev polynomials \(\mathbf{T}_{k}(x)\), up to \(K^{th}\) order
( remove the need to compute the eigenvectors of Laplacian )
Spectral Network vs ChebNet
- Spectral Network : \(\mathbf{g}_{\theta} \star \mathbf{x}=\mathbf{U g}_{\theta}(\Lambda) \mathbf{U}^{T} \mathbf{x}\).
- ChebNet : \(\mathbf{g}_{\theta} \star \mathbf{x} \approx \sum_{k=0}^{K} \boldsymbol{\theta}_{k} \mathbf{T}_{k}(\tilde{\mathbf{L}}) \mathbf{x}\)
- where \(\tilde{\mathbf{L}}=\frac{2}{\lambda_{\max }} \mathbf{L}-\mathbf{I}_{N} \cdot \lambda_{\max }\).
- \(\mathbf{L} . \theta \in \mathbb{R}^{K}\) : vector of Chebyshev coefficients
Chebyshev Polynomial :
-
\(\mathbf{T}_{k}(\mathbf{x})=2 \mathbf{x} \mathbf{T}_{k-1}(\mathbf{x})\),
where \(\mathbf{T}_{0}(\mathbf{x})=1\) and \(\mathbf{T}_{1}(\mathbf{x})=\mathbf{x}\)
4.1.3. GCN
ChebNet vs GCN
- ChebNet : \(\mathbf{g}_{\theta} \star \mathbf{x} \approx \sum_{k=0}^{K} \boldsymbol{\theta}_{k} \mathbf{T}_{k}(\tilde{\mathbf{L}}) \mathbf{x}\).
- pre-GCN (1) : \(\mathbf{g}_{\theta^{\prime}} \star \mathbf{x} \approx \theta_{0}^{\prime} \mathbf{x}+\theta_{1}^{\prime}\left(\mathbf{L}-\mathbf{I}_{N}\right) \mathbf{x}=\theta_{0}^{\prime} \mathbf{x}-\theta_{1}^{\prime} \mathbf{D}^{-\frac{1}{2}} \mathbf{A} \mathbf{D}^{-\frac{1}{2}} \mathbf{x}\)
- let \(K=1\) ( to alleviate overfitting on local neighbor )
- approximate \(\lambda_{\max } \approx 2\)
- pre-GCN (2) : \(\mathbf{g}_{\theta} \star \mathbf{x} \approx \theta\left(\mathbf{I}_{N}+\mathbf{D}^{-\frac{1}{2}} \mathbf{A D}{ }^{-\frac{1}{2}}\right) \mathbf{x} .\)
- constrain the number of parameters with \(\theta=\theta_{0}^{\prime}=-\theta_{1}^{\prime}\)
Renormalization Trick
- stacking operators above could lead to numerical instabilities
- solution : renormalization trick
- \(\mathbf{I}_{N}+\) \(\mathbf{D}^{-\frac{1}{2}} \mathbf{A D}{ }^{-\frac{1}{2}} \rightarrow \tilde{\mathbf{D}}^{-\frac{1}{2}} \tilde{\mathbf{A}} \tilde{\mathbf{D}}^{-\frac{1}{2}}\)
- \(\tilde{\mathbf{A}}=\mathbf{A}+\mathbf{I}_{N}\).
- \(\tilde{\mathbf{D}}_{i i}=\sum_{j} \tilde{\mathbf{A}}_{i j}\).
- generalization : \(\mathbf{Z}=\tilde{\mathbf{D}}^{-\frac{1}{2}} \tilde{\mathbf{A}} \tilde{\mathbf{D}}^{-\frac{1}{2}} \mathbf{X} \Theta\)
- \(\mathbf{I}_{N}+\) \(\mathbf{D}^{-\frac{1}{2}} \mathbf{A D}{ }^{-\frac{1}{2}} \rightarrow \tilde{\mathbf{D}}^{-\frac{1}{2}} \tilde{\mathbf{A}} \tilde{\mathbf{D}}^{-\frac{1}{2}}\)
GCN summary : \(\mathbf{Z}=\tilde{\mathbf{D}}^{-\frac{1}{2}} \tilde{\mathbf{A}} \tilde{\mathbf{D}}^{-\frac{1}{2}} \mathbf{X} \Theta\)
- \(\mathbf{X} \in \mathbb{R}^{N \times C}\) , wth \(C\) channels & \(F\) filters
- \(\Theta \in \mathbb{R}^{C \times F}\) : matrix of filter parameters
- \(\mathbf{Z} \in \mathbb{R}^{N \times F}\) : convolved signal matrix
4-1-4. AGCN
4-1-1 ~ 4-1-3 :
- use the original graph structure
\(\rightarrow\) but….there may be IMPLICIT relation!
\(\rightarrow\) propose ADAPTIVE GCN
Goal : learn underlying relations
-
learns “residual” graph laplacian \(\mathbf{L}_{\text {res }}\)
-
add it to original laplacian : \(\widehat{\mathbf{L}}=\mathbf{L}+\alpha \mathbf{L}_{\text {res }},\)
Residual graph laplacian : \(\mathbf{L}_{\text {res }}\)
- \(\mathbf{L}_{\text {res }} =\mathbf{I}-\widehat{\mathbf{D}}^{-\frac{1}{2}} \widehat{\mathbf{A}} \widehat{\mathbf{D}}\).
- \(\widehat{\mathbf{D}} =\operatorname{degree}(\widehat{\mathbf{A}})\).
- \(\widehat{\mathbf{A}}\) : computed with learned metric
learned metric : adaptive to task & input features
-
AGCN uses generalized Mahalanobis distance
-
\(D\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right)=\sqrt{\left(\mathbf{x}_{i}-\mathbf{x}_{j}\right)^{T} \mathbf{M}\left(\mathbf{x}_{i}-\mathbf{x}_{j}\right)}\),
where \(\mathbf{M}\) is a learned parameter
-
\(\mathbf{M}=\mathbf{W}_{d} \mathbf{W}_{d}^{T}\),
where \(\mathbf{W}_d\) is the transform basis to the adaptive space
-
AGCN
- (1) calculates Gaussian kernel,
- \(G_{x_{i}, x_{j}}=\exp \left(-D\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right) /\left(2 \sigma^{2}\right)\right)\).
- (2) then normalize G to get \(\hat{\mathbf{A}}\) ( = dense adjacency matrix )
4-2. Spatial Methods
Spectral methods
-
learned filters : depend on Laplacian eigenbasis
( = depends on graph structure )
-
Cons : trained model can not be applied to graph with DIFFERENT structure
Spatial methods
- define convolutions, DIRECTLY on graph
- challenges :
- (1) defining the convolution operation with differently sized neighborhoods
- (2) maintaing the local invariance of CNN
4-2-1. Neural FPS
DIFFERENT weight matrixes, for nodes with DIFFERENT degrees
-
\(\mathbf{x} =\mathbf{h}_{v}^{t-1}+\sum_{i=1}^{ \mid N_{v} \mid } \mathbf{h}_{i}^{t-1}\).
-
where \(\mathbf{h}_{v}^{t} =\sigma\left(\mathbf{x}\mathbf{W}_{\mathbf{t}}^{ \mid \mathbf{N}_{v} \mid }\right)\)
-
\(\mathbf{W}_{\mathbf{t}}^{ \mid \mathbf{N}_{v} \mid }\) : weight matrix, for nodes with degree \(\mid N_v \mid\)
-
-
adds (1) itself & (2) neighbors
Drawback : can not be applied to LARGE-SCALE graphs ( too large node degree… )
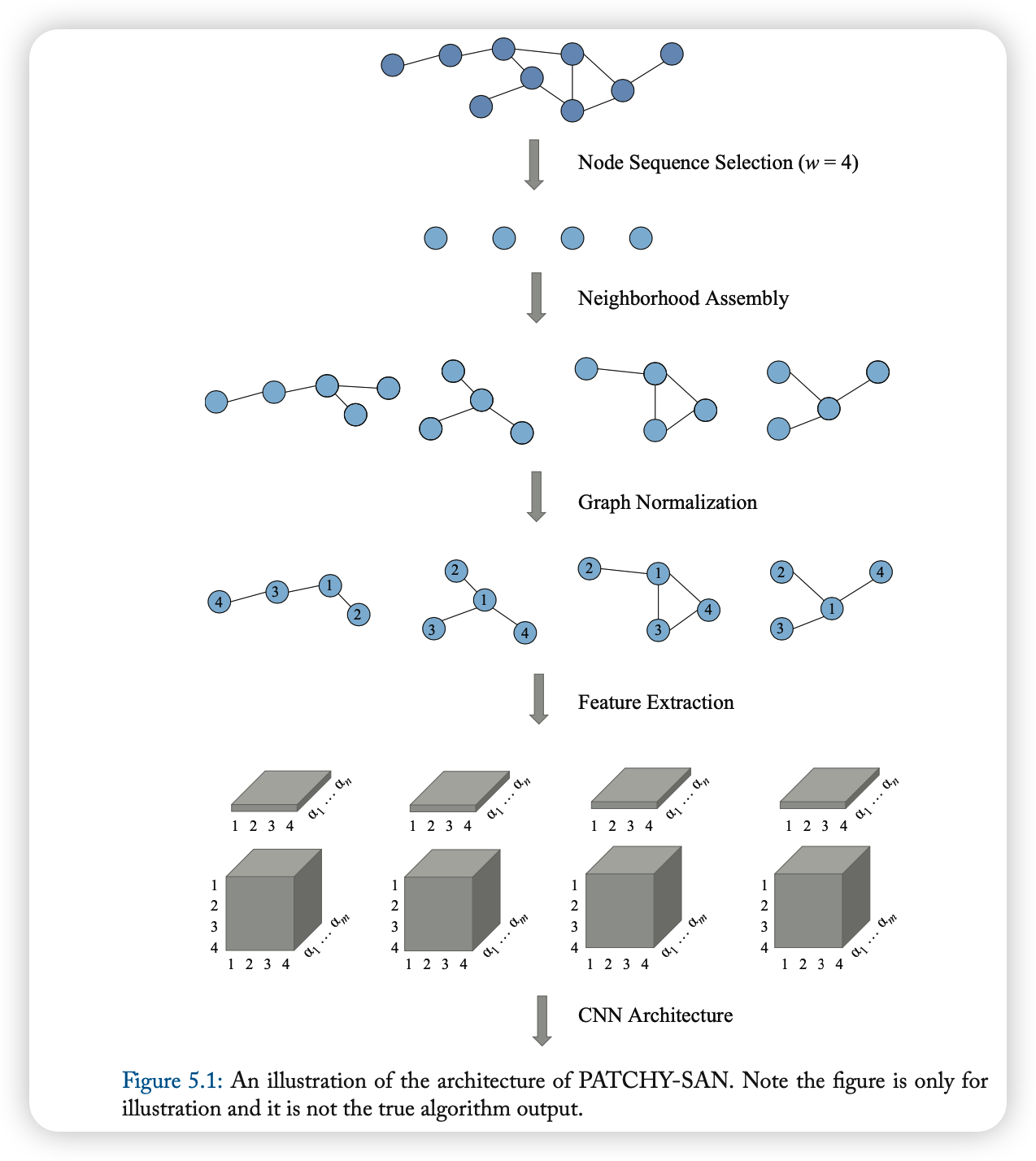
4-2-2. PATCHY-SAN
Simple Steps
- (1) select & normalize \(k\) neighbors ( for each node )
- (2) apply convolution
- normalized neighborhood = receptive field
Detailed Steps
- (1) Node Sequence Selection
- do not use all nodes
- select a sqeuence of nodes
- (2) Neighborhood Asembly
- BFS, until total of \(k\) neighbors are extracted
- (3) Graph Normalziation
- Give an order to nodes in receptive field
- unordered graph -> vector space
- goal : assign node from 2 different graphs similar relative positions, if they have similar structural roles
- Give an order to nodes in receptive field
- (4) Convolutional Architecture
- receptive field = normalized neighborhoods
- channels = node & edge attributes
4-2-3. DCNN
DIFFUSION CNN
- transition matrices are used to define neighbors
- Ex) node classification :
- \(\mathbf{H}=\sigma\left(\mathbf{W}^{c} \odot \mathbf{P}^{*} \mathbf{X}\right)\).
- \(\mathbf{X}\) : input features ( shape : \(N \times F\) )
- \(\mathbf{P}^{*}\) : \(N \times K \times N\) Tensor, which contains power series
- power series : \(\left\{\mathbf{P}, \mathbf{P}^{2}, \ldots, \mathbf{P}^{K}\right\}\)
- \(\mathbf{P}\) : degree-normalized transition matrix from adjacency matrix \(\mathbf{A}\)
- \(\mathbf{H}=\sigma\left(\mathbf{W}^{c} \odot \mathbf{P}^{*} \mathbf{X}\right)\).
- result : transformed into diffusion convolutional representation
- shape ( of each entity ) : \(K \times F\)
- \(K\) Hops of graph diffusion, over \(F\) features
- shape ( of full ) : \(N \times K \times F\) ….notation : \(\mathbf{H}\)
- shape ( of each entity ) : \(K \times F\)
For graph classification…
- take average of nodes’ representation
- \(\mathbf{H}=\sigma\left(\mathbf{W}^{c} \odot 1_{N}^{T} \mathbf{P}^{*} \mathbf{X} / N\right)\).
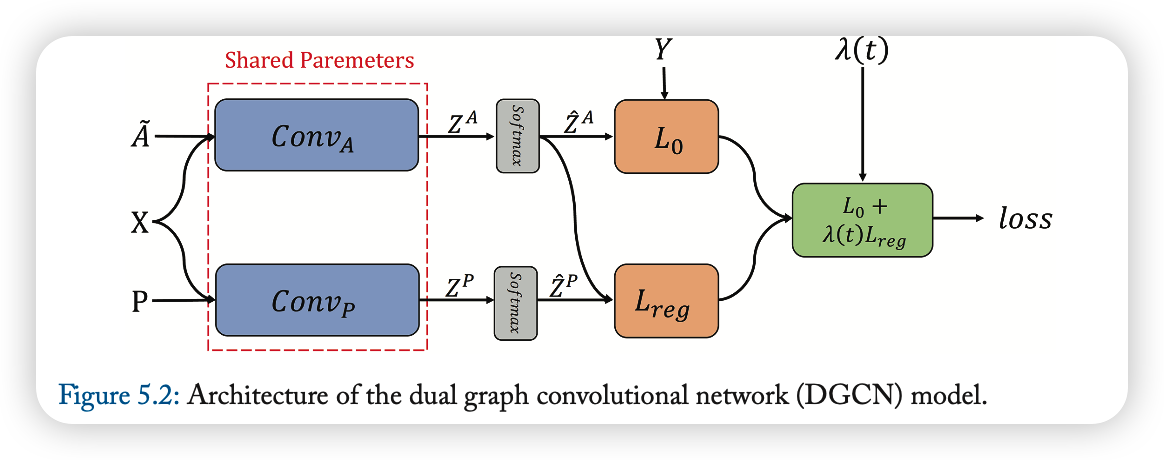
4-2-4. DGCN
Dual GCN … what is dual?
- (1) LOCAL consistency
- (2) GLOBAL consistency
\(\rightarrow\) Uses 2 convolutions ( one supervised loss & one unsupervised loss )
First convolution ( \(C o n v_{A}\) )
-
for LOCAL consistency
- original GCN ( \(\mathbf{Z}=\tilde{\mathbf{D}}^{-\frac{1}{2}} \tilde{\mathbf{A}} \tilde{\mathbf{D}}^{-\frac{1}{2}} \mathbf{X} \Theta\) )
- concept : nearby nodes may have similar labels
Second convolution ( \(C o n v_{P}\) )
-
for GLOBAL consistency
-
replace adjacency matrix, with PPMI matrix
( = Positive Pointwise Mutual Information matrix… \(\mathbf{X}_{P}\) )
-
\(\mathbf{H}^{\prime}=\sigma\left(\mathbf{D}_{P}^{-\frac{1}{2}} \mathbf{X}_{P} \mathbf{D}_{P}^{-\frac{1}{2}} \mathbf{H} \Theta\right)\).
-
concept : nodes with similar context may have similar labels
Ensemble 2 convolutions!
Final Loss function :
- \(L=L_{0}\left(\operatorname{Conv}_{A}\right)+\lambda(t) L_{\text {reg }}\left(\operatorname{Conv}_{A}, \operatorname{Conv}_{P}\right)\).
- \(L_{0}\left(\operatorname{Conv}_{A}\right)\) : supervised loss ( = CE Loss )
- \(L_{0}\left(\operatorname{Conv}_{A}\right)=-\frac{1}{ \mid y_{L} \mid } \sum_{l \in y_{L}} \sum_{i=1}^{c} Y_{l, i} \ln \left(\widehat{Z}_{l, i}^{A}\right)\).
- \(L_{\text {reg }}\left(\operatorname{Conv}_{A}, \operatorname{Conv}_{P}\right)\) : unsupervised loss
- \(L_{\text {reg }}\left(\operatorname{Conv}_{A}, \operatorname{Conv}_{P}\right)=\frac{1}{n} \sum_{i=1}^{n} \mid \mid \widehat{Z}_{i,:}^{P}-\widehat{Z}_{i,:}^{A} \mid \mid ^{2}\).
- \(L_{0}\left(\operatorname{Conv}_{A}\right)\) : supervised loss ( = CE Loss )
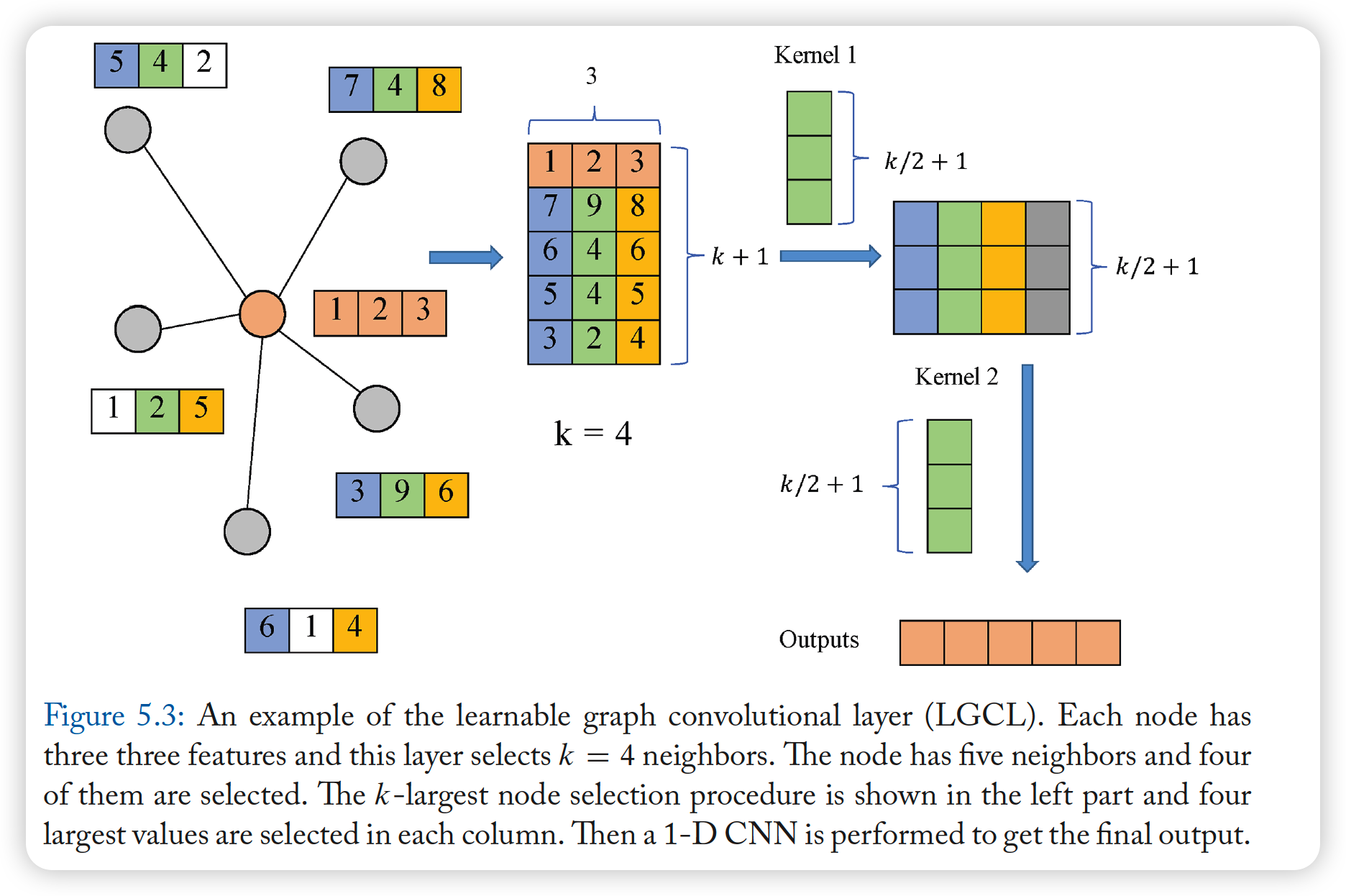
4-2-5. LGCN
Learnable GCN
- based on “LGCL” (Learnable GC Layer) & “sub-graph training strategy”
LGCL (Learnable GCL)
-
use CNNs as aggregators
-
2 step
- (1) get top-k feature elements
- (2) apply 1-d can
-
propagation step :
- \(\widehat{H}_{t} =g\left(H_{t}, A, k\right)\).
- \(g\) : k-largest node selection operation
- \(H_{t+1} =c\left(\widehat{H}_{t}\right)\).
- \(c\) : regular 1-D CNN
- \(\widehat{H}_{t} =g\left(H_{t}, A, k\right)\).
-
if less than \(k\)…..then zero-padding
-
finally,embedding of node \(x\) is inserted in the first row
\(\rightarrow\) \(\widehat{M} \in \mathbb{R}^{(k+1) \times c}\)
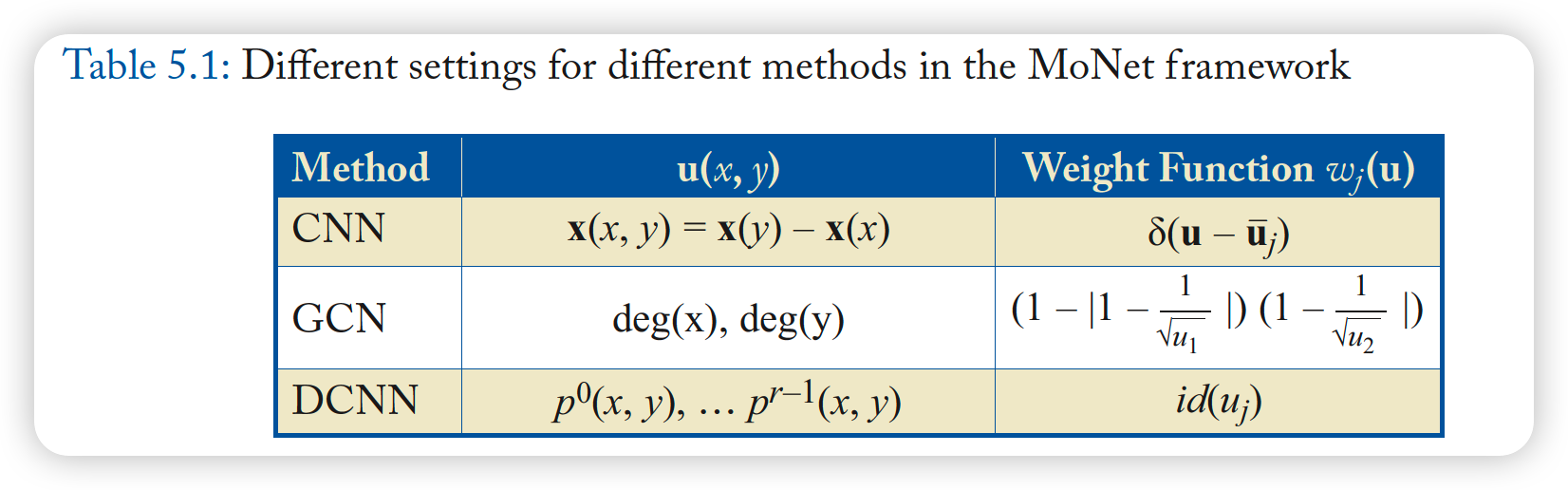
4-2-6. MONET
MoNet ( = spatial domain model ), on non-Euclidean domains
- examples :
- (1) GCNN ( Geodesic CNN )
- (2) ACNN ( Anisotropic CNN )
- (3) GCNN
- (4) DCNN
MoNet comuptes pseudo-coordinates \(\mathbf{u}(x,y)\)
- use it as weighting function among these coordinates
\(\rightarrow\) \(D_{j}(x) f=\sum_{y \in N_{x}} w_{j}(\mathbf{u}(x, y)) f(y)\).
Then, do convolution, on non-Euclidean domains!
\(\rightarrow\) \((f \star g)(x)=\sum_{j=1}^{J} g_{j} D_{j}(x) f .\)
4-2-7. GraphSAGE
general inductive framework
- generates embeddings, by “sampling” & “aggregating” features
Propagation step :
- \(\mathbf{h}_{N_{v}}^{t} =\text { AGGREGATE }_{t}\left(\left\{\mathbf{h}_{u}^{t-1}, \forall u \in N_{v}\right\}\right)\).
- \(\mathbf{h}_{v}^{t} =\sigma\left(\mathbf{W}^{t} \cdot\left[\mathbf{h}_{v}^{t-1} \mid \mid \mathbf{h}_{N_{v}}^{t}\right]\right)\).
\(\rightarrow\) but, do not use FULL set of neighbors! use UNIFORM SAMPLING
Aggregator functions :
- (1) mean aggregator
- (2) LSTM aggregator
- (3) Pooling aggregator
- ( any symmetric functions can be used )
Also, proposes an UNSUPERVISED loss function
-
encourages nearby nodes to have similar representations,
while distant nodes have different representations
-
\(J_{G}\left(\mathbf{z}_{u}\right)=-\log \left(\sigma\left(\mathbf{z}_{u}^{T} \mathbf{z}_{v}\right)\right)-Q \cdot E_{v_{n} \sim P_{n}(v)} \log \left(\sigma\left(-\mathbf{z}_{u}^{T} \mathbf{z}_{v_{n}}\right)\right)\),
- \(v\) : neighbor of node \(u\)
- \(P_n\) : negative sampling distribution
- \(Q\) : number of negative samples