
A3T-GCN : Attention Temporal GCN for Traffic Forecasting (2020)
Contents
- Abstract
- A3T-GCN
- Definition of Problems
- GCN
- GRU
- Attention
- A3T-GCN
- Loss Function
0. Abstract
Traffic Forecasting :
- challenging considering the complex “spatial” and “temporal” dependencies among traffic flows
A3T-GCN (Attention Temporal GCN)
- to simultaneously capture GLOBAL TEMPORAL DYNAMICS & SPATIAL CORRELATIONS
- learns the…
- (1) short-time trend
- with GRU
- (2) spatial dependence
- based on the topology of road network, with GCN
- (1) short-time trend
- use attention ,
- to adjust the importance of different time points
- to assemble global temporal information
- source code : https://github.com/lehaifeng/T-GCN/A3T.
1. A3T-GCN
(1) Definition of problems
Notation
- road network : \(G=(V, E)\)
- road section : \(V=\left\{v_{1}, v_{2}, \cdots, v_{N}\right\}\)
- connection between road sections : \(E\)
- adjacency matrix : \(A \in R^{N \times N}\)
- feature matrix : \(X^{N \times P}\)
- traffic speed on a road section
- \(P\) : node feature dimension ( = length of historical TS )
Goal :
- predict traffic speeds of future \(T\) moments
- \(\left[X_{t+1}, \cdots, X_{t+T}\right]=f\left(G ;\left(X_{t-n}, \cdots, X_{t-1}, X_{t}\right)\right)\).
(2) GCN
GCN = Semi-supervised models
Spectrum convolution : (1) x (2)
- (1) signal \(x\) on the graph
- (2) figure filter \(g_{\theta}(L)\)
- constructed in Fourier domain
- \(g_{\theta}(L) * x=U g_{\theta}\left(U^{T} x\right)\).
- normalized Laplacian : \(L=I_{N}-D^{-\frac{1}{2}} A D^{-\frac{1}{2}}=U \lambda U^{T}\)
- graph Fourier transform of \(x\) : \(U^{T} x\)
Multi-layer GCN model : \(H^{(l+1)}=\sigma\left(\widetilde{D}^{-\frac{1}{2}} \widehat{A} \widetilde{D}^{-\frac{1}{2}} H^{(l)} \theta^{(l)}\right)\)
- \(\widetilde{A}=A+I_{N}\),
- \(\widetilde{D}_{i i}=\sum_{j} \widetilde{A}_{i j}\).
ex) 2-layer GCN model : \(f(X, A)=\sigma\left(\widehat{A} \operatorname{ReLU}\left(\widehat{A} X W_{0}\right) W_{1}\right)\)
- \(W_{0} \in R^{P \times H}\) ,
- where \(P\) = length of time & \(H\) = number of hidden units
- \(W_{1} \in R^{H \times T}\),
- weight matrix from the hidden layer to the output layer
- forecast length = \(T\)
(3) GRU
\(\begin{gathered} u_{t}=\sigma\left(W_{u} *\left[X_{t}, h_{t-1}\right]+b_{u}\right) \\ r_{t}=\sigma\left(W_{r} *\left[X_{t}, h_{t-1}\right]+b_{r}\right) \\ c_{t}=\tanh \left(W_{c}\left[X_{t},\left(r_{t} * h_{t-1}\right)\right]+b_{c}\right) \\ h_{t}=u_{t} * h_{t-1}+\left(1-u_{t}\right) * c_{t} \end{gathered}\).
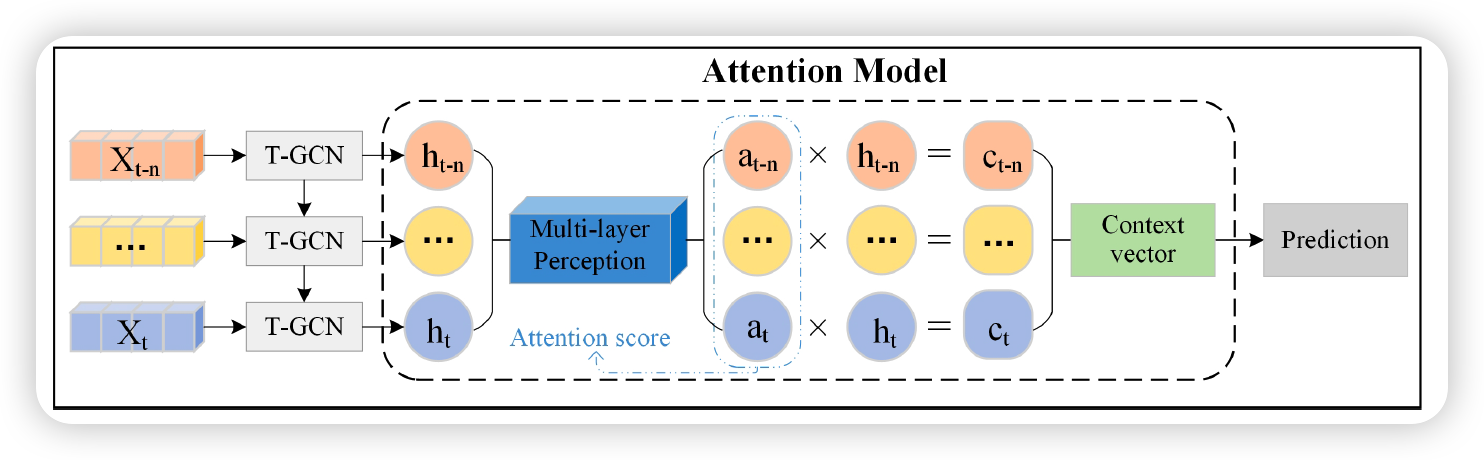
(4) Attention
step 1) \(e_{i}=w_{(2)}\left(w_{(1)} H+b_{(1)}\right)+b_{(2)}\)
step 2) \(\alpha_{i}=\frac{\exp \left(e_{i}\right)}{\sum_{k=1}^{n} \exp \left(e_{k}\right)}\).
step 3) \(C_{t}=\sum_{i=1}^{n} \alpha_{i} * h_{i}\)
- context vector, that covers traffic variation information
(5) A3T-GCN
-
improvement of T-GCN ( temporal GCN )
-
T-GCN = (1) GCN + (2) GRU
-
[INPUT] backcast length : \(n\)
-
[HIDDEN] \(n\) hidden states
-
\[\left\{h_{t-n}, \cdots, h_{t-1}, h_{t}\right\}\]
( = contains “spatio” & “temporal” characteristics )
- A3T-GCN : put these into attention model
-
\[\left\{h_{t-n}, \cdots, h_{t-1}, h_{t}\right\}\]
-
[OUTPUT] via FC layer
-
-
T-GCN calculation :
- \(u_{t}=\sigma\left(W_{u} *\left[G C\left(A, X_{t}\right), h_{t-1}\right]+b_{u}\right)\).
- \(r_{t}=\sigma\left(W_{r} *\left[G C\left(A, X_{t}\right), h_{t-1}\right]+b_{r}\right)\).
- \(c_{t}=\tanh \left(W_{c} *\left[G C\left(A, X_{t}\right),\left(r_{t} * h_{t-1}\right)\right]+b_{c}\right)\).
- \(\left.h_{t}=u_{t} * h_{t-1}+\left(1-u_{t}\right) * c_{t}\right)\).
-
Why attention?
- re-weight the influence of historical traffic states and thus to capture the global variation trends of traffic state
(6) Loss Function
\(\operatorname{loss}=\mid \mid Y_{t}-\widehat{Y}_{t} \mid \mid+\lambda L_{r e g}\).