
MTGNN 코드 리뷰
( 논문 리뷰 : https://seunghan96.github.io/ts/gnn/ts41/ )
from layer import *
class gtnet(nn.Module):
def __init__(self, gcn_true, buildA_true, gcn_depth, num_nodes, device,
predefined_A=None, static_feat=None,
dropout=0.3, subgraph_size=20, node_dim=40,
dilation_exponential=1, conv_channels=32, residual_channels=32, skip_channels=64, end_channels=128,
seq_length=12, in_dim=2, out_dim=12, layers=3,
propalpha=0.05, tanhalpha=3, layer_norm_affline=True):
super(gtnet, self).__init__()
self.gcn_true = gcn_true
#==========================================================================================#
# [ 0. Basics ]
self.num_nodes = num_nodes # 시계열의 개수 ( = number of nodes )
self.idx = torch.arange(self.num_nodes).to(device) # 시계열 index ( = indicies of nodes )
self.layers = layers # layer 개수
self.dropout = dropout
self.seq_length = seq_length
self.start_conv = nn.Conv2d(in_channels=in_dim,
out_channels=residual_channels,
kernel_size=(1, 1)) # input 데이터를 가장먼저 latent space로 임베딩
# receptive field
kernel_size = 7
if dilation_exponential>1:
self.receptive_field = int(1+(kernel_size-1)*(dilation_exponential**layers-1)/(dilation_exponential-1))
else:
self.receptive_field = layers*(kernel_size-1) + 1
#==========================================================================================#
# [ 1. Graph Learning ]
self.buildA_true = buildA_true # A = adjacency matrix ( 구조를 learn할지, predefine할지 )
self.predefined_A = predefined_A
self.gc = graph_constructor(num_nodes, subgraph_size, node_dim, device, alpha=tanhalpha, static_feat=static_feat)
#==========================================================================================#
# [ 2. Temporal Convolution ]
self.filter_convs = nn.ModuleList() # Dilated Inception Layer들이 담길 곳 (1) -> value 역할
self.gate_convs = nn.ModuleList() # Dilated Inception Layer들이 담길 곳 (2) -> gate
self.residual_convs = nn.ModuleList() # GCN 안 쓸 경우의 CNN
self.skip_convs = nn.ModuleList() # skipconnection 하기 전에 shape 맞춰줄 1x1 conv
#==========================================================================================#
# [ 3. Graph Convolution ]
self.gconv1 = nn.ModuleList() # GCN (1) ... mixhop-prop으로 구성
self.gconv2 = nn.ModuleList() # GCN (2) ... mixhop-prop으로 구성
self.norm = nn.ModuleList() # GCN 통과 후, Layer Normalization 할지
#==========================================================================================#
# [ 4. 모듈 추가하기 ]
for i in range(1):
#----------------------------------------------------------------------------------------#
if dilation_exponential>1:
rf_size_i = int(1 + i*(kernel_size-1)*(dilation_exponential**layers-1)/(dilation_exponential-1))
else:
rf_size_i = i*layers*(kernel_size-1)+1
#----------------------------------------------------------------------------------------#
## layer 개수 만큼, 모듈들 추가하기
new_dilation = 1
for j in range(1,layers+1):
#----------------------------------------------------------------------------------------#
## receptive field 크기 정하기
if dilation_exponential > 1:
rf_size_j = int(rf_size_i + (kernel_size-1)*(dilation_exponential**j-1)/(dilation_exponential-1))
else:
rf_size_j = rf_size_i+j*(kernel_size-1)
#----------------------------------------------------------------------------------------#
## a) Temporal Convolution에 필요한 모듈 추가
self.filter_convs.append(dilated_inception(residual_channels, conv_channels, dilation_factor=new_dilation))
self.gate_convs.append(dilated_inception(residual_channels, conv_channels, dilation_factor=new_dilation))
self.residual_convs.append(nn.Conv2d(in_channels=conv_channels,
out_channels=residual_channels,
kernel_size=(1, 1)))
if self.seq_length>self.receptive_field:
self.skip_convs.append(nn.Conv2d(in_channels=conv_channels,
out_channels=skip_channels,
kernel_size=(1, self.seq_length-rf_size_j+1)))
else:
self.skip_convs.append(nn.Conv2d(in_channels=conv_channels,
out_channels=skip_channels,
kernel_size=(1, self.receptive_field-rf_size_j+1)))
#----------------------------------------------------------------------------------------#
## b) Graph Convolution에 필요한 모듈 추가
if self.gcn_true:
self.gconv1.append(mixprop(conv_channels, residual_channels, gcn_depth, dropout, propalpha))
self.gconv2.append(mixprop(conv_channels, residual_channels, gcn_depth, dropout, propalpha))
if self.seq_length>self.receptive_field:
self.norm.append(LayerNorm((residual_channels, num_nodes, self.seq_length - rf_size_j + 1),elementwise_affine=layer_norm_affline))
else:
self.norm.append(LayerNorm((residual_channels, num_nodes, self.receptive_field - rf_size_j + 1),elementwise_affine=layer_norm_affline))
#----------------------------------------------------------------------------------------#
new_dilation *= dilation_exponential
#==========================================================================================#
# [ 5. Final Convolution ]
self.end_conv_1 = nn.Conv2d(in_channels=skip_channels,
out_channels=end_channels,
kernel_size=(1,1),
bias=True)
self.end_conv_2 = nn.Conv2d(in_channels=end_channels,
out_channels=out_dim,
kernel_size=(1,1),
bias=True)
#==========================================================================================#
# [ 6. Skipconnection 전/후의 NN ]
## skip0 : 시작할 때
## skipE : 끝날 때
if self.seq_length > self.receptive_field:
self.skip0 = nn.Conv2d(in_channels=in_dim, out_channels=skip_channels, kernel_size=(1, self.seq_length), bias=True)
self.skipE = nn.Conv2d(in_channels=residual_channels, out_channels=skip_channels, kernel_size=(1, self.seq_length-self.receptive_field+1), bias=True)
else:
self.skip0 = nn.Conv2d(in_channels=in_dim, out_channels=skip_channels, kernel_size=(1, self.receptive_field), bias=True)
self.skipE = nn.Conv2d(in_channels=residual_channels, out_channels=skip_channels, kernel_size=(1, 1), bias=True)
def forward(self, input, idx=None):
seq_len = input.size(3)
assert seq_len==self.seq_length, 'input sequence length not equal to preset sequence length'
# 길이 안맞을 경우, padding
if self.seq_length<self.receptive_field:
input = nn.functional.pad(input,(self.receptive_field-self.seq_length,0,0,0))
#-----------------------------------------------------------------------------#
# [ 1. Graph Learning Module ]
# (1) adp = adapative adjacency matrix ()
if self.gcn_true:
if self.buildA_true:
if idx is None:
adp = self.gc(self.idx)
else:
adp = self.gc(idx)
else:
adp = self.predefined_A
#-----------------------------------------------------------------------------#
# [ 2. GCN & 3. TCN의 교대 반복 ]
x = self.start_conv(input)
skip = self.skip0(F.dropout(input, self.dropout, training=self.training))
for i in range(self.layers):
residual = x
filter = self.filter_convs[i](x)
filter = torch.tanh(filter)
gate = self.gate_convs[i](x)
gate = torch.sigmoid(gate)
x = filter * gate
x = F.dropout(x, self.dropout, training=self.training)
#------skipconnection에 추가할 부분--------#
s = x
s = self.skip_convs[i](s)
skip = s + skip
#--------------------------------------#
if self.gcn_true:
x = self.gconv1[i](x, adp)+self.gconv2[i](x, adp.transpose(1,0))
else:
x = self.residual_convs[i](x)
x = x + residual[:, :, :, -x.size(3):]
if idx is None:
x = self.norm[i](x,self.idx)
else:
x = self.norm[i](x,idx)
skip = self.skipE(x) + skip
x = F.relu(skip)
x = F.relu(self.end_conv_1(x))
x = self.end_conv_2(x)
return x
nconv: matrix multiplication
class nconv(nn.Module):
def __init__(self):
super(nconv,self).__init__()
def forward(self,x, A):
x = torch.einsum('ncwl,vw->ncvl',(x,A))
return x.contiguous()
dy_nconv: matrix multiplication ( 미분용 )
class dy_nconv(nn.Module):
def __init__(self):
super(dy_nconv,self).__init__()
def forward(self,x, A):
x = torch.einsum('ncvl,nvwl->ncwl',(x,A))
return x.contiguous()
linear: 1x1 convolution
class linear(nn.Module):
def __init__(self,c_in,c_out,bias=True):
super(linear,self).__init__()
self.mlp = torch.nn.Conv2d(c_in, c_out,
kernel_size=(1, 1),
padding=(0,0),
stride=(1,1), bias=bias)
def forward(self,x):
return self.mlp(x)
mixprop : Mix-hop Propagation
- \(\mathbf{H}^{(k)}=\beta \mathbf{H}_{i n}+(1-\beta) \tilde{\mathbf{A}} \mathbf{H}^{(k-1)}\).
class mixprop(nn.Module):
def __init__(self,c_in,c_out,gdep,dropout,alpha):
super(mixprop, self).__init__()
self.nconv = nconv()
self.mlp = linear((gdep+1)*c_in,c_out)
self.gdep = gdep
self.dropout = dropout
self.alpha = alpha
def forward(self,x,adj):
#-------------------------------------------------------------------#
adj = adj + torch.eye(adj.size(0)).to(x.device) # self loop 더하기
d = adj.sum(1) # rowsum ( 즉, degree )
adj = adj / d.view(-1, 1) # normalize
#-------------------------------------------------------------------#
h = x # h = 1st hidden vector
out = [h] # 중간 결과물들 저장
for i in range(self.gdep):
h = self.alpha*x + (1-self.alpha)*self.nconv(h,adj)
out.append(h)
ho = torch.cat(out,dim=1) # 결과물들 합치기
ho = self.mlp(ho)
#-------------------------------------------------------------------#
return ho
dy_mixprop : Mix-hop Propagation ( 미분 버전 )
class dy_mixprop(nn.Module):
def __init__(self,c_in,c_out,gdep,dropout,alpha):
super(dy_mixprop, self).__init__()
self.nconv = dy_nconv()
self.mlp1 = linear((gdep+1)*c_in,c_out)
self.mlp2 = linear((gdep+1)*c_in,c_out)
self.gdep = gdep
self.dropout = dropout
self.alpha = alpha
self.lin1 = linear(c_in,c_in)
self.lin2 = linear(c_in,c_in)
def forward(self,x):
#adj = adj + torch.eye(adj.size(0)).to(x.device)
#d = adj.sum(1)
x1 = torch.tanh(self.lin1(x))
x2 = torch.tanh(self.lin2(x))
adj = self.nconv(x1.transpose(2,1),x2)
adj0 = torch.softmax(adj, dim=2)
adj1 = torch.softmax(adj.transpose(2,1), dim=2)
h = x
out = [h]
for i in range(self.gdep):
h = self.alpha*x + (1-self.alpha)*self.nconv(h,adj0)
out.append(h)
ho = torch.cat(out,dim=1)
ho1 = self.mlp1(ho)
h = x
out = [h]
for i in range(self.gdep):
h = self.alpha * x + (1 - self.alpha) * self.nconv(h, adj1)
out.append(h)
ho = torch.cat(out, dim=1)
ho2 = self.mlp2(ho)
return ho1+ho2

dilated_1D : 1개의 dilated 1D conv
- 다양한 크기의 kernel로 생성한 뒤 합칠 것!
class dilated_1D(nn.Module):
def __init__(self, cin, cout, dilation_factor=2):
super(dilated_1D, self).__init__()
self.tconv = nn.ModuleList()
self.kernel_set = [2,3,6,7]
self.tconv = nn.Conv2d(cin,cout,
kernel_size=(1,7),
dilation=(1,dilation_factor))
def forward(self,input):
x = self.tconv(input)
return x
dilated_inception : 4가지 커널 size를 가지고 dilated inception 모듈 생성
- 각각의 결과들을 전부 concatenate한다
class dilated_inception(nn.Module):
def __init__(self, cin, cout, dilation_factor=2):
super(dilated_inception, self).__init__()
self.tconv = nn.ModuleList()
self.kernel_set = [2,3,6,7]
cout = int(cout/len(self.kernel_set))
for kern in self.kernel_set:
self.tconv.append(nn.Conv2d(cin,cout,(1,kern),dilation=(1,dilation_factor)))
def forward(self,input):
x = []
for i in range(len(self.kernel_set)):
x.append(self.tconv[i](input))
for i in range(len(self.kernel_set)):
x[i] = x[i][...,-x[-1].size(3):]
x = torch.cat(x,dim=1)
return x
graph_constructor : graph learning을 위한 모듈
\(\begin{aligned} &\mathbf{M}_{1}=\tanh \left(\alpha \mathbf{E}_{1} \boldsymbol{\Theta}_{1}\right) \\ &\mathbf{M}_{2}=\tanh \left(\alpha \mathbf{E}_{2} \boldsymbol{\Theta}_{2}\right) \\ &\mathbf{A}=\operatorname{ReLU}\left(\tanh \left(\alpha\left(\mathbf{M}_{1} \mathbf{M}_{2}^{T}-\mathbf{M}_{2} \mathbf{M}_{1}^{T}\right)\right)\right) \\ &\text { for } i=1,2, \cdots, N \\ &\mathbf{i d x}=\operatorname{argtopk}(\mathbf{A}[i,:]) \\ &\mathbf{A}[i,-\mathbf{i d x}]=0 \end{aligned}\).
class graph_constructor(nn.Module):
def __init__(self, nnodes, k, dim, device, alpha=3, static_feat=None):
super(graph_constructor, self).__init__()
self.nnodes = nnodes # number of node
self.device = device
self.k = k # 상위 k개 ( k+1등부터는 연결 끊음 (=0) )
self.dim = dim # embedding 차원
self.alpha = alpha
self.static_feat = static_feat
#-------------------------------------------------------#
# ( prior로 static feature (O) 경우 )
if static_feat is not None:
xd = static_feat.shape[1]
self.lin1 = nn.Linear(xd, dim)
self.lin2 = nn.Linear(xd, dim)
# ( prior로 static feature (X) 경우 )
else:
self.emb1 = nn.Embedding(nnodes, dim)
self.emb2 = nn.Embedding(nnodes, dim)
self.lin1 = nn.Linear(dim,dim)
self.lin2 = nn.Linear(dim,dim)
#-------------------------------------------------------#
def forward(self, idx):
#-------------------------------------------------------#
# static feature (O) 경우
if self.static_feat is None:
M1 = self.emb1(idx)
M2 = self.emb2(idx)
# static feature (X) 경우
else:
M1 = self.static_feat[idx,:]
M2 = M1
#-------------------------------------------------------#
# Adjacency matrix 계산
M1 = torch.tanh(self.alpha*self.lin1(M1))
M2 = torch.tanh(self.alpha*self.lin2(M2))
A_temp = torch.mm(M1, M2.transpose(1,0))-torch.mm(M2, M1.transpose(1,0))
A = F.relu(torch.tanh(self.alpha*A_temp))
#-------------------------------------------------------#
# Top K에 못드는거 masking
mask = torch.zeros(idx.size(0), idx.size(0)).to(self.device)
mask.fill_(float('0'))
s1,t1 = (A + torch.rand_like(A)*0.01).topk(self.k,1)
mask.scatter_(1,t1,s1.fill_(1))
#-------------------------------------------------------#
# 최종 Adjacency matrix
A = A*mask
return A
def fullA(self, idx): # masking 없는 부분
if self.static_feat is None:
M1 = self.emb1(idx)
M2 = self.emb2(idx)
else:
M1 = self.static_feat[idx,:]
M2 = M1
#-------------------------------------------------------#
# Adjacency matrix 계산
M1 = torch.tanh(self.alpha*self.lin1(M1))
M2 = torch.tanh(self.alpha*self.lin2(M2))
A_temp = torch.mm(M1, M2.transpose(1,0))-torch.mm(M2, M1.transpose(1,0))
A = F.relu(torch.tanh(self.alpha*A_temp))
return A
LayerNorm : Layer Normalization
class LayerNorm(nn.Module):
__constants__ = ['normalized_shape', 'weight', 'bias', 'eps', 'elementwise_affine']
def __init__(self, normalized_shape, eps=1e-5, elementwise_affine=True):
super(LayerNorm, self).__init__()
if isinstance(normalized_shape, numbers.Integral):
normalized_shape = (normalized_shape,)
self.normalized_shape = tuple(normalized_shape)
self.eps = eps
self.elementwise_affine = elementwise_affine
if self.elementwise_affine:
self.weight = nn.Parameter(torch.Tensor(*normalized_shape))
self.bias = nn.Parameter(torch.Tensor(*normalized_shape))
else:
self.register_parameter('weight', None)
self.register_parameter('bias', None)
self.reset_parameters()
def reset_parameters(self):
if self.elementwise_affine:
init.ones_(self.weight)
init.zeros_(self.bias)
def forward(self, input, idx):
if self.elementwise_affine:
return F.layer_norm(input, tuple(input.shape[1:]), self.weight[:,idx,:], self.bias[:,idx,:], self.eps)
else:
return F.layer_norm(input, tuple(input.shape[1:]), self.weight, self.bias, self.eps)
def extra_repr(self):
return '{normalized_shape}, eps={eps}, ' \
'elementwise_affine={elementwise_affine}'.format(**self.__dict__)
trainer.py
class Trainer():
def __init__(self, model, lrate, wdecay, clip, step_size, seq_out_len, scaler, device, cl=True):
self.scaler = scaler
self.model = model
self.model.to(device)
self.optimizer = optim.Adam(self.model.parameters(), lr=lrate, weight_decay=wdecay)
self.loss = util.masked_mae
self.clip = clip
self.step = step_size
self.iter = 1
self.task_level = 1
self.seq_out_len = seq_out_len
self.cl = cl
def train(self, input, real_val, idx=None):
self.model.train()
self.optimizer.zero_grad()
output = self.model(input, idx=idx)
output = output.transpose(1,3)
real = torch.unsqueeze(real_val,dim=1)
predict = self.scaler.inverse_transform(output)
if self.iter%self.step==0 and self.task_level<=self.seq_out_len:
self.task_level +=1
if self.cl:
loss = self.loss(predict[:, :, :, :self.task_level], real[:, :, :, :self.task_level], 0.0)
else:
loss = self.loss(predict, real, 0.0)
loss.backward()
if self.clip is not None:
torch.nn.utils.clip_grad_norm_(self.model.parameters(), self.clip)
self.optimizer.step()
# mae = util.masked_mae(predict,real,0.0).item()
mape = util.masked_mape(predict,real,0.0).item()
rmse = util.masked_rmse(predict,real,0.0).item()
self.iter += 1
return loss.item(),mape,rmse
def eval(self, input, real_val):
self.model.eval()
output = self.model(input)
output = output.transpose(1,3)
real = torch.unsqueeze(real_val,dim=1)
predict = self.scaler.inverse_transform(output)
loss = self.loss(predict, real, 0.0)
mape = util.masked_mape(predict,real,0.0).item()
rmse = util.masked_rmse(predict,real,0.0).item()
return loss.item(),mape,rmse
class Optim(object):
def _makeOptimizer(self):
if self.method == 'sgd':
self.optimizer = optim.SGD(self.params, lr=self.lr, weight_decay=self.lr_decay)
elif self.method == 'adagrad':
self.optimizer = optim.Adagrad(self.params, lr=self.lr, weight_decay=self.lr_decay)
elif self.method == 'adadelta':
self.optimizer = optim.Adadelta(self.params, lr=self.lr, weight_decay=self.lr_decay)
elif self.method == 'adam':
self.optimizer = optim.Adam(self.params, lr=self.lr, weight_decay=self.lr_decay)
else:
raise RuntimeError("Invalid optim method: " + self.method)
def __init__(self, params, method, lr, clip, lr_decay=1, start_decay_at=None):
self.params = params # careful: params may be a generator
self.last_ppl = None
self.lr = lr
self.clip = clip
self.method = method
self.lr_decay = lr_decay
self.start_decay_at = start_decay_at
self.start_decay = False
self._makeOptimizer()
def step(self):
grad_norm = 0
if self.clip is not None:
torch.nn.utils.clip_grad_norm_(self.params, self.clip)
self.optimizer.step()
return grad_norm
# decay learning rate if val perf does not improve or we hit the start_decay_at limit
def updateLearningRate(self, ppl, epoch):
if self.start_decay_at is not None and epoch >= self.start_decay_at:
self.start_decay = True
if self.last_ppl is not None and ppl > self.last_ppl:
self.start_decay = True
if self.start_decay:
self.lr = self.lr * self.lr_decay
print("Decaying learning rate to %g" % self.lr)
#only decay for one epoch
self.start_decay = False
self.last_ppl = ppl
self._makeOptimizer()
util.py
normal_std (x)
- x의 standard deviation 구하기
def normal_std(x):
return x.std() * np.sqrt((len(x) - 1.) / (len(x)))
StandardScaler
class StandardScaler():
def __init__(self, mean, std):
self.mean = mean
self.std = std
def transform(self, data):
return (data - self.mean) / self.std
def inverse_transform(self, data):
return (data * self.std) + self.mean
sym_adj&asym_adj
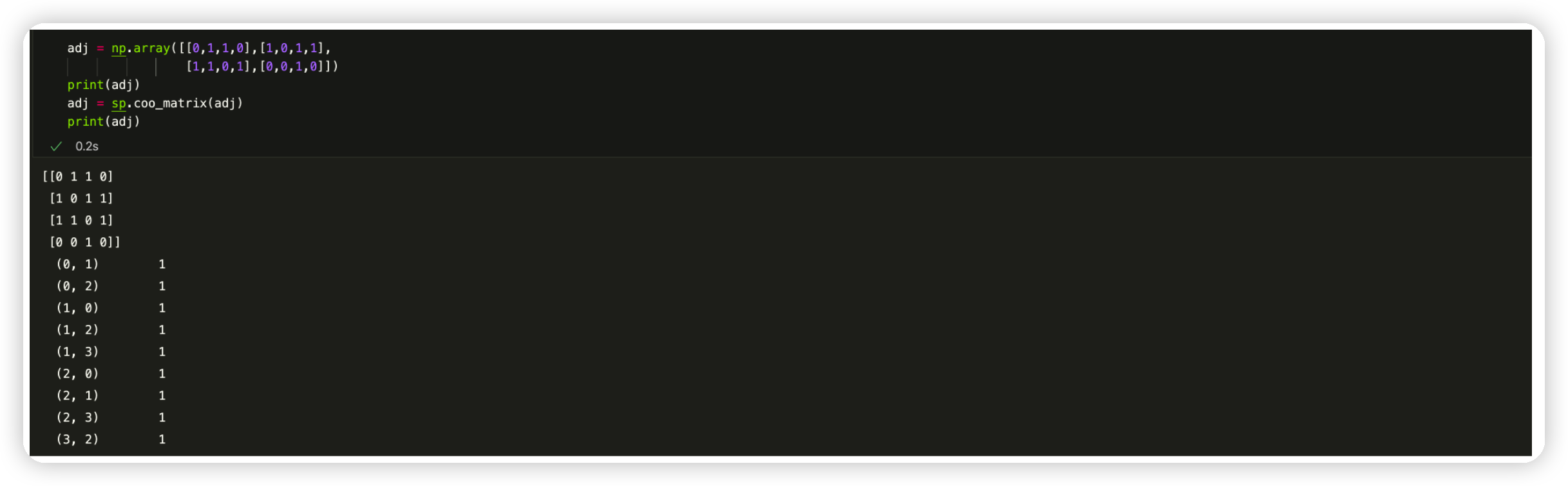
import scipy.sparse as sp
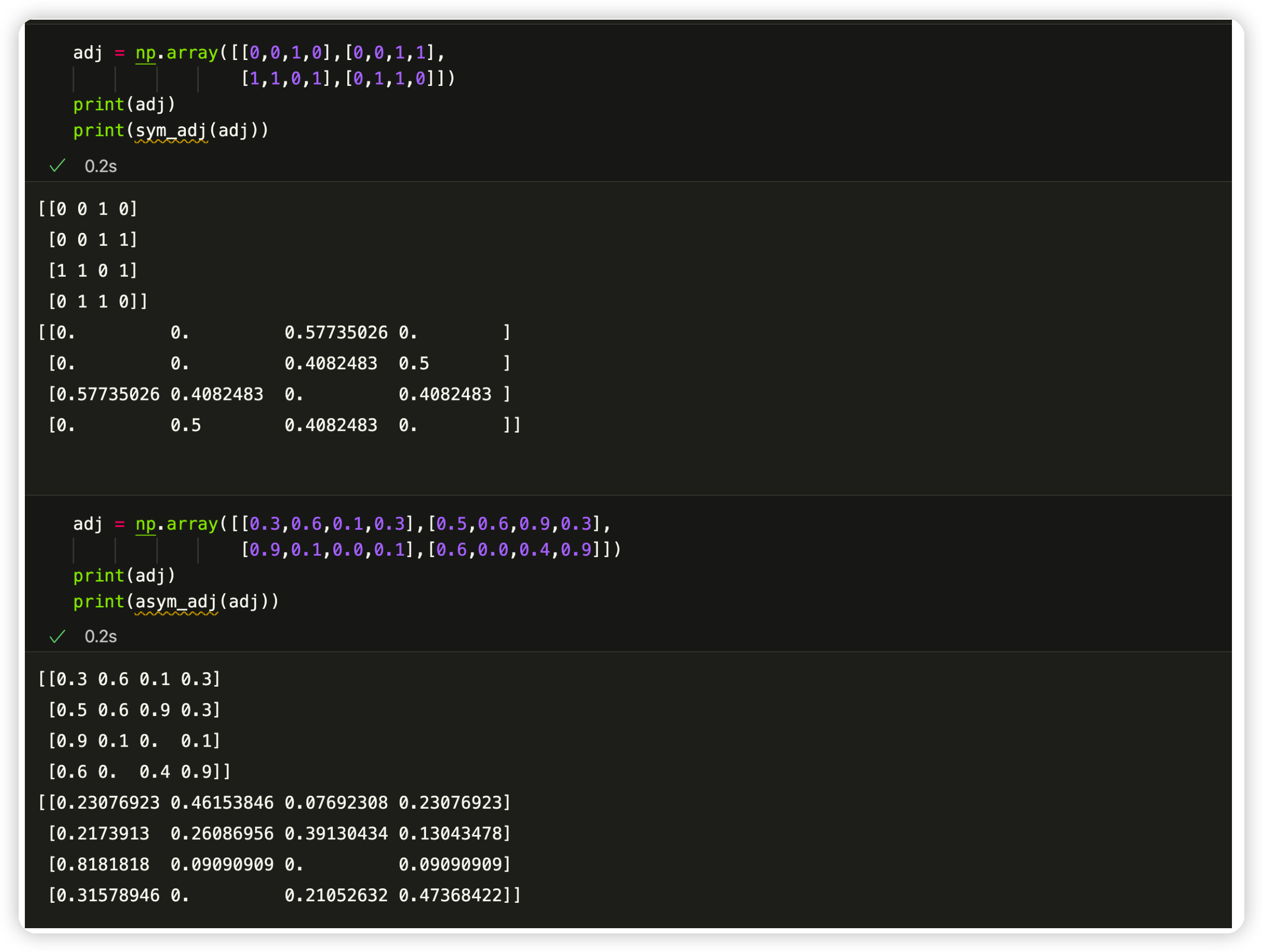
def sym_adj(adj):
"""Symmetrically normalize adjacency matrix."""
adj = sp.coo_matrix(adj)
rowsum = np.array(adj.sum(1))
d_inv_sqrt = np.power(rowsum, -0.5).flatten()
d_inv_sqrt[np.isinf(d_inv_sqrt)] = 0.
d_mat_inv_sqrt = sp.diags(d_inv_sqrt)
return adj.dot(d_mat_inv_sqrt).transpose().dot(d_mat_inv_sqrt).astype(np.float32).todense()
def asym_adj(adj):
"""Asymmetrically normalize adjacency matrix."""
adj = sp.coo_matrix(adj)
rowsum = np.array(adj.sum(1)).flatten()
d_inv = np.power(rowsum, -1).flatten()
d_inv[np.isinf(d_inv)] = 0.
d_mat= sp.diags(d_inv)
return d_mat.dot(adj).astype(np.float32).todense()
Normalized Laplacian Matrix
- https://thejb.ai/comprehensive-gnns-3/ 참조
def calculate_normalized_laplacian(adj):
adj = sp.coo_matrix(adj) # (1) adjacency matrix
d = np.array(adj.sum(1)) # (2) degree 계산하기
d_inv_sqrt = np.power(d, -0.5).flatten()
d_inv_sqrt[np.isinf(d_inv_sqrt)] = 0.
d_mat_inv_sqrt = sp.diags(d_inv_sqrt)
normalized_laplacian = sp.eye(adj.shape[0]) - adj.dot(d_mat_inv_sqrt).transpose().dot(d_mat_inv_sqrt).tocoo()
return normalized_laplacian
각종 파일들 load 하기
def load_pickle(pickle_file):
try:
with open(pickle_file, 'rb') as f:
pickle_data = pickle.load(f)
except UnicodeDecodeError as e:
with open(pickle_file, 'rb') as f:
pickle_data = pickle.load(f, encoding='latin1')
except Exception as e:
print('Unable to load data ', pickle_file, ':', e)
raise
return pickle_data
def load_adj(pkl_filename):
sensor_ids, sensor_id_to_ind, adj = load_pickle(pkl_filename)
return adj
def load_dataset(dataset_dir, batch_size, valid_batch_size= None, test_batch_size=None):
data = {}
for category in ['train', 'val', 'test']:
cat_data = np.load(os.path.join(dataset_dir, category + '.npz'))
data['x_' + category] = cat_data['x']
data['y_' + category] = cat_data['y']
scaler = StandardScaler(mean=data['x_train'][..., 0].mean(), std=data['x_train'][..., 0].std())
# Data format
for category in ['train', 'val', 'test']:
data['x_' + category][..., 0] = scaler.transform(data['x_' + category][..., 0])
data['train_loader'] = DataLoaderM(data['x_train'], data['y_train'], batch_size)
data['val_loader'] = DataLoaderM(data['x_val'], data['y_val'], valid_batch_size)
data['test_loader'] = DataLoaderM(data['x_test'], data['y_test'], test_batch_size)
data['scaler'] = scaler
return data
def load_node_feature(path):
fi = open(path)
x = []
for li in fi:
li = li.strip()
li = li.split(",")
e = [float(t) for t in li[1:]]
x.append(e)
x = np.array(x)
mean = np.mean(x,axis=0)
std = np.std(x,axis=0)
z = torch.tensor((x-mean)/std,dtype=torch.float)
return z
평가지표 (metric)
def metric(pred, real):
mae = masked_mae(pred,real,0.0).item()
mape = masked_mape(pred,real,0.0).item()
rmse = masked_rmse(pred,real,0.0).item()
return mae,mape,rmse
def masked_mse(preds, labels, null_val=np.nan):
if np.isnan(null_val):
mask = ~torch.isnan(labels)
else:
mask = (labels!=null_val)
mask = mask.float()
mask /= torch.mean((mask))
mask = torch.where(torch.isnan(mask), torch.zeros_like(mask), mask)
loss = (preds-labels)**2
loss = loss * mask
loss = torch.where(torch.isnan(loss), torch.zeros_like(loss), loss)
return torch.mean(loss)
def masked_rmse(preds, labels, null_val=np.nan):
return torch.sqrt(masked_mse(preds=preds, labels=labels, null_val=null_val))
def masked_mae(preds, labels, null_val=np.nan):
if np.isnan(null_val):
mask = ~torch.isnan(labels)
else:
mask = (labels!=null_val)
mask = mask.float()
mask /= torch.mean((mask))
mask = torch.where(torch.isnan(mask), torch.zeros_like(mask), mask)
loss = torch.abs(preds-labels)
loss = loss * mask
loss = torch.where(torch.isnan(loss), torch.zeros_like(loss), loss)
return torch.mean(loss)
def masked_mape(preds, labels, null_val=np.nan):
if np.isnan(null_val):
mask = ~torch.isnan(labels)
else:
mask = (labels!=null_val)
mask = mask.float()
mask /= torch.mean((mask))
mask = torch.where(torch.isnan(mask), torch.zeros_like(mask), mask)
loss = torch.abs(preds-labels)/labels
loss = loss * mask
loss = torch.where(torch.isnan(loss), torch.zeros_like(loss), loss)
return torch.mean(loss)
class DataLoaderS(object):
# train and valid is the ratio of training set and validation set. test = 1 - train - valid
def __init__(self, file_name, train, valid, device, horizon, window, normalize=2):
self.P = window
self.h = horizon
fin = open(file_name)
self.rawdat = np.loadtxt(fin, delimiter=',')
self.dat = np.zeros(self.rawdat.shape)
self.n, self.m = self.dat.shape
self.normalize = 2
self.scale = np.ones(self.m)
self._normalized(normalize)
self._split(int(train * self.n), int((train + valid) * self.n), self.n)
self.scale = torch.from_numpy(self.scale).float()
tmp = self.test[1] * self.scale.expand(self.test[1].size(0), self.m)
self.scale = self.scale.to(device)
self.scale = Variable(self.scale)
self.rse = normal_std(tmp)
self.rae = torch.mean(torch.abs(tmp - torch.mean(tmp)))
self.device = device
def _normalized(self, normalize):
if (normalize == 0):
self.dat = self.rawdat
if (normalize == 1): # 전체 max
self.dat = self.rawdat / np.max(self.rawdat)
if (normalize == 2): # row별 max ( 각 시계열 별 max )
for i in range(self.m):
self.scale[i] = np.max(np.abs(self.rawdat[:, i]))
self.dat[:, i] = self.rawdat[:, i] / np.max(np.abs(self.rawdat[:, i]))
def _split(self, train, valid, test):
train_set = range(self.P + self.h - 1, train)
valid_set = range(train, valid)
test_set = range(valid, self.n)
self.train = self._batchify(train_set, self.h)
self.valid = self._batchify(valid_set, self.h)
self.test = self._batchify(test_set, self.h)
def _batchify(self, idx_set, horizon):
n = len(idx_set)
X = torch.zeros((n, self.P, self.m))
Y = torch.zeros((n, self.m))
for i in range(n):
end = idx_set[i] - self.h + 1
start = end - self.P
X[i, :, :] = torch.from_numpy(self.dat[start:end, :])
Y[i, :] = torch.from_numpy(self.dat[idx_set[i], :])
return [X, Y]
def get_batches(self, inputs, targets, batch_size, shuffle=True):
length = len(inputs)
if shuffle:
index = torch.randperm(length)
else:
index = torch.LongTensor(range(length))
start_idx = 0
while (start_idx < length):
end_idx = min(length, start_idx + batch_size)
excerpt = index[start_idx:end_idx]
X = inputs[excerpt]
Y = targets[excerpt]
X = X.to(self.device)
Y = Y.to(self.device)
yield Variable(X), Variable(Y)
start_idx += batch_size