T-GCN : A Temporal GCN for Traffic Prediction
0. Abstract
to capture SPATIAL & TEMPORAL dependence simultaneously,
\(\rightarrow\) propose T-GCN
- combination of (1) GCN + (2) GRU
1. Methodology
(1) Problem Definition
Notation
- unweighted graph : \(G=(V, E)\)
- road nodes : \(V=\left\{v_{1}, v_{2}, \cdots, v_{N}\right\}, \mathrm{N}\)
- adjacency matrix : \(A \in R^{N \times N}\)
- feature matrix : \(X^{N \times P}\)
- \(P\) : length of historical TS ( = number of node attributes )
- \(X_{t} \in R^{N \times 1}\) : speed of every road, at time \(t\)
Goal : \(\left[X_{t+1}, \cdots, X_{t+T}\right]=f\left(G ;\left(X_{t-n}, \cdots, X_{t-1}, X_{t}\right)\right)\)
- backcast size : \(n\)
- forecast size : \(T\)
(2) Overview
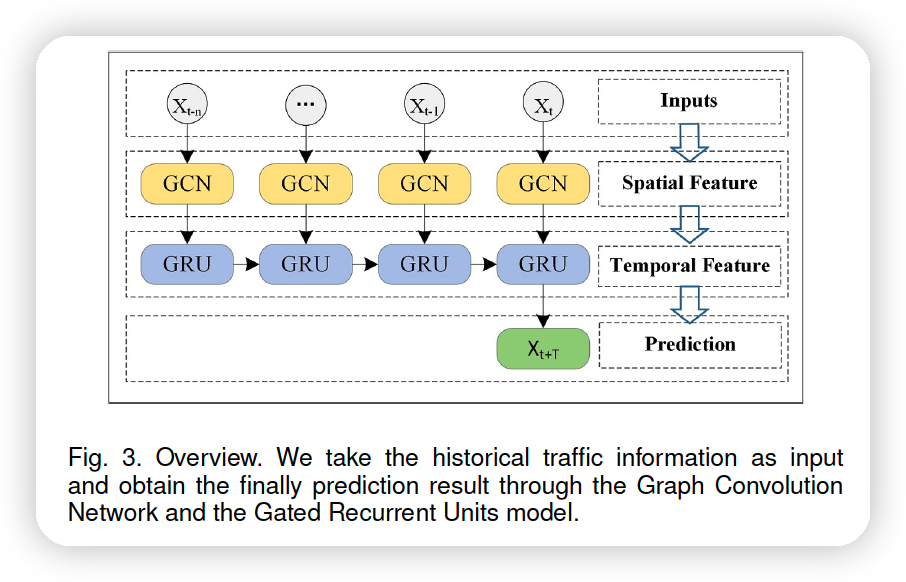
매 time step마다의 input size : \(N \times 1\)
(3) Methodology
a) SPATIAL : GCN
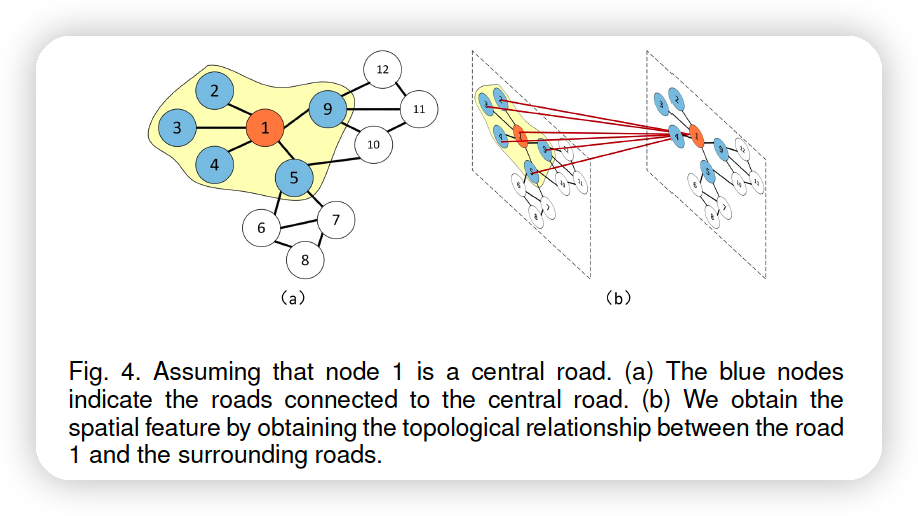
CNN vs GCN
- CNN : only on Euclidean space
- GCN : ok on non-Euclidean space
GCN
- constructs a filter in Fourier Domain
- use GCN to learn spatial features
- \(f(X, A)=\sigma\left(\widehat{A} \operatorname{Relu}\left(\widehat{A} X W_{0}\right) W_{1}\right)\).
- \(\widehat{A}=\widetilde{D}^{-\frac{1}{2}} \widetilde{A} \widetilde{D}{ }^{-\frac{1}{2}}\).
- \(\widetilde{A}=A+I_{N}\).
- \(\widetilde{D}=\sum_{j} \widetilde{A}_{i j}\).
- \(\widehat{A}=\widetilde{D}^{-\frac{1}{2}} \widetilde{A} \widetilde{D}{ }^{-\frac{1}{2}}\).
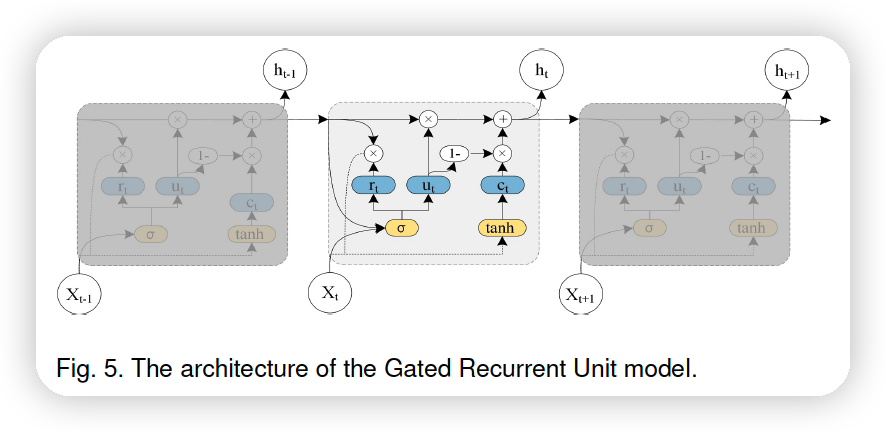
b) TEMPORAL : GRU
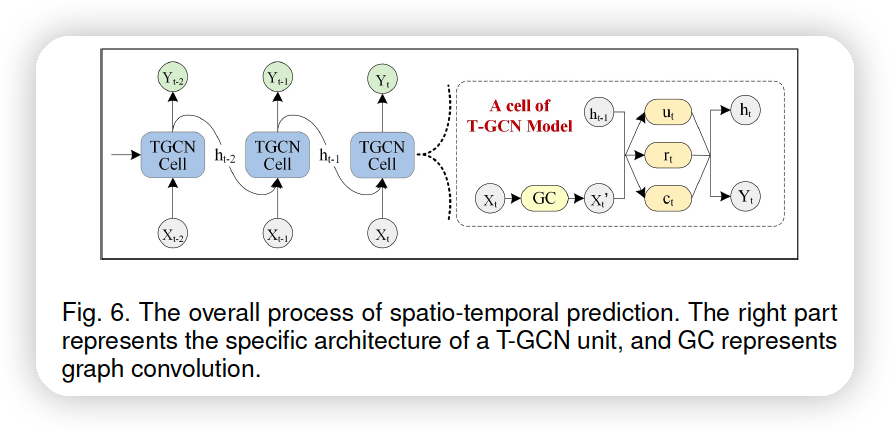
c) T-GCN