Diffusion Models and Representation Learning: A Survey
https://arxiv.org/pdf/2407.00783
Contents
Abstract
Diffusion Models
-
Popular generative modeling methods
-
Unique instance of SSL methods
($\because$ Independence from label annotation)
This paper:
-
Explores the interplay btw (1) diffusion models and (2) representation learning
- Details
- (1) Mathematical foundations
- (2) Popular denoising network architectures
- (3) Guidance methods
-
Two frameworks
-
a) Frameworks that leverage representations learned from pre-trained diffusion models
$\rightarrow$ Use for subsequent recognition tasks
-
b) Methods that utilize advancements in SSL to enhance diffusion models
-
- Comprehensive overview
1. Introduction
P1) Intro to diffusion models
Recently emerged as the SOTA of generative modeling
P2) SSL
Scalability
- Current SOTA SSL show great scalability!
- Diffusion models exhibit similar scaling properties
Generation
-
(1) Controlled generation approaches
- e.g., Classifier Guidance (CG) & Classifier-free Guidance (CFG)
- Rely on annotated data \(\rightarrow\) Bottleneck for scaling up!
- e.g., Classifier Guidance (CG) & Classifier-free Guidance (CFG)
-
(2) Guidance approaches that leverage “representation learning”
\(\rightarrow\) Potentially enabling diffusion models to train on much larger, annotation-free datasets.
P3) Diffusion & representation learning
Two central perspectives
- (1) Using diffusion models “themselves” for representation learning
- (2) Using representation learning for “improving” diffusion models.
P4) Increasing works
P5)
Current approaches:
\(\rightarrow\) Rely on using diffusion models solely trained for generative synthesis for representation learning.
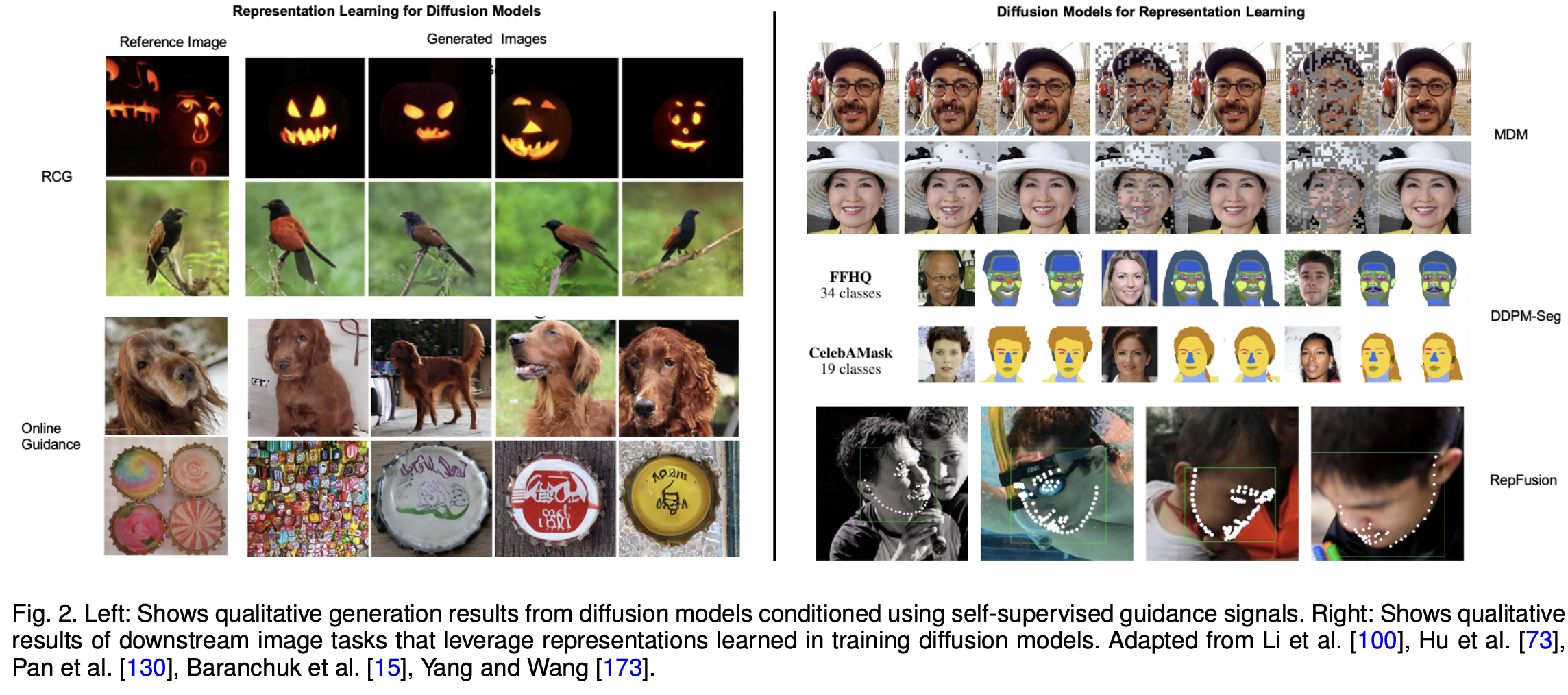
Qualitative results
P6) Main contributions
- (1) Comprehensive Overview
- Interplay between diffusion models & representation learning
- How diffusion models can be used for representation learning and vice versa
- (2) Taxonomy of Approaches
- Approaches in diffusion-based representation learning
- (3) Generalized Frameworks
- Generalized frameworks for both …
- (1) Diffusion model feature extraction
- (2) Assignment-based guidance
- Generalized frameworks for both …
- (4) Future Directions
2. Background
(1) Mathematical Foundations
a) Forward process
\(\begin{gathered} p\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right)=\mathcal{N}\left(\mathbf{x}_t ; \sqrt{1-\beta_t} \mathbf{x}_{t-1}, \quad \beta_t \mathbf{I}\right), \\ \forall t \in\{1, \ldots, T\} \end{gathered}\).
\(p\left(\mathbf{x}_t \mid \mathbf{x}_0\right)=\mathcal{N}\left(\mathbf{x}_t ; \sqrt{\bar{\alpha}_t} \mathbf{x}_0 ;\left(1-\bar{\alpha}_t\right) \mathbf{I}\right)\).
- where \(\alpha_t:=1-\beta_t\) and \(\bar{\alpha}_t:=\prod_{i=1}^t \alpha_i\).
\(\mathbf{x}_t=\sqrt{\bar{\alpha}_t} \mathbf{x}_0+\sqrt{\left(1-\bar{\alpha}_t\right)} \epsilon_t\).
b) Backward process
\(\mathbf{x}_T \sim \pi\left(\mathbf{x}_T\right)=\mathcal{N}(0, \mathbf{I})\) .
\(p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)= \mathcal{N}\left(\mathbf{x}_{t-1} ; \mu_\theta\left(\mathbf{x}_t, t\right), \Sigma_\theta\left(\mathbf{x}_t, t\right)\right)\).
c) Loss function
\(\begin{aligned} \mathcal{L}_{v t b}= & -\log p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)+D_{K L}\left(p\left(\mathbf{x}_T \mid \mathbf{x}_0\right) \mid \mid \pi\left(\mathbf{x}_T\right)\right) \\ & +\sum_{t>1} D_{K L}\left(p\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right) \mid \mid p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)\right) \end{aligned}\).
d) Mean & Noise prediction
\(\mu\left(\mathbf{x}_t, t\right):=\frac{\sqrt{\alpha_{t-1}}\left(1-\bar{\alpha}_{t-1}\right) \mathbf{x}_t+\sqrt{\bar{\alpha}_{t-1}}\left(1-\alpha_t\right) \mathbf{x}_0}{1-\bar{\alpha}_t}\).
\(\mu_\theta\left(\mathbf{x}_t, t\right)=\frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t-\frac{1-\alpha_t}{\sqrt{1-\bar{\alpha}_t}} \boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right) .\right)\).
- DDPM:
- (1) Suggest fixing the covariance \(\Sigma_\theta\left(\mathbf{x}_t, t\right)\) to a constant value
- (2) Suggest predicting the added noise \(\boldsymbol{\epsilon}\left(\mathbf{x}_t, t\right)\) instead of \(\mathbf{x}_0\)
- Loss function becomes…
- \(\mathcal{L}_{\text {simple }}=\mathbb{E}_{t \sim[1, T]} \mathbb{E}_{\mathbf{x}_0 \sim p\left(\mathbf{x}_0\right)} \mathbb{E}_{\boldsymbol{\epsilon}_{\mathrm{t}} \sim \mathcal{N}(0, \mathbf{I})} \mid \mid \boldsymbol{\epsilon}_{\mathrm{t}}-\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right) \mid \mid ^2\).
e) Improving sampling efficiency
Velocity prediction
- Velocity = Linear combination of denoised input & added noise
- \(\mathbf{v}=\bar{\alpha}_t \epsilon-\left(1-\bar{\alpha}_t\right) \mathbf{x}_t\).
\(\rightarrow\) Combines benefits of both data & noise parametrizations
f) Stochastic Differential Equation (SDE)
Continuous (O) Discrete (X) timeseteps
Diffusion process = Continuous time-dependent function \(\sigma(t)\).
\(d \mathbf{x}=\mathbf{f}(\mathbf{x}, t) d t+g(t) d \mathbf{w}\).
- (1) (Vector) Drift coefficient \(\mathbf{f}(\cdot, t): \mathbb{R}^d \rightarrow \mathbb{R}^d\)
- (2) (Scalar) Diffusion coefficient \(g(\cdot): \mathbb{R} \rightarrow \mathbb{R}\)
- \(\mathbf{w}\): Standard Wiener process
Two widely used choices of the SDE formulation
\(\rightarrow\) Differs by the assumption of the drift term and diffusion term!
- (1) Variance-Preserving (VP) SDE
- (2) Variance-Exploding (VE) SDE
(1) Variance-Preserving (VP) SDE
- Drift: \(\mathbf{f}(\mathbf{x}, t)=-\frac{1}{2} \beta(t) \mathbf{x}\).
- Diffusion: \(g(t)=\sqrt{\beta(t)}\)
- Equivalent to the continuous formulation of the DDPM parametrization
(2) Variance-Exploding (VE) SDE
- Drift: \(\mathbf{f}(\mathbf{x}, t)=0\)
- Diffusion: \(g(t)=\sqrt{2 \alpha(t) {d t}} =\sqrt{2 \sigma(t) \frac{d \sigma(t)}{d t}}\)
- Variance continually increases with increasing \(t\)
- Widely used in score-based models
| Type | Drift Term (\(f(x,t)\)) | Diffusion Term (\(g(t)\)) | Example |
|---|---|---|---|
| VP SDE | \(-\frac{1}{2} \beta(t) \mathrm{x}\) | \(\sqrt{\beta(t)}\) | \(\beta(t)=\beta_{\min }+\left(\beta_{\max }-\beta_{\min }\right) t\) |
| VE SDE | \(0\) | \(\sqrt{2 \alpha(t)}\) | \(\alpha(t)=\alpha_{\min }\left(\alpha_{\max } / \alpha_{\min }\right)^t\) |
Summary 1) General
-
Forward SDE: \(d \mathbf{x}=\mathbf{f}(\mathbf{x}, t) d t+g(t) d \mathbf{w}\).
-
Reverse SDE: \(d \mathbf{x}=\left[\mathbf{f}(\mathbf{x}, t)-g(t)^2 \nabla_{\mathbf{x}} \log p_t(\mathbf{x})\right] d t+g(t) d \mathbf{w}\).
-
\(\nabla_{\mathbf{x}} \log p(\mathbf{x} ; \sigma(t))\) = Score function
\(\rightarrow\) Generally not known! Approximated using a NN!
-
Summary 2) VP-SDE
- Forward SDE:
- \(\begin{aligned} d \mathbf{x}&=\mathbf{f}(\mathbf{x}, t) d t+g(t) d \mathbf{w}\\&=-\frac{1}{2} \beta(t) \mathbf{x} d t+ \sqrt{\beta(t)} d \mathbf{w}\end{aligned}\).
- Reverse SDE:
- \(\begin{aligned}d \mathbf{x}&=\left[\mathbf{f}(\mathbf{x}, t)-g(t)^2 \nabla_{\mathbf{x}} \log p_t(\mathbf{x})\right] d t+g(t) d \mathbf{w}\\&= \left[-\frac{1}{2} \beta(t) \mathbf{x}- \beta(t) \nabla_{\mathbf{x}} \log p_t(\mathbf{x})\right] d t+ \sqrt{\beta(t)} d \mathbf{w}\end{aligned}\).
Summary 3) VE-SDE
- Forward SDE:
- \(\begin{aligned}d \mathbf{x}&=\mathbf{f}(\mathbf{x}, t) d t+g(t) d \mathbf{w}\\&= \sqrt{2 \sigma(t) \frac{d \sigma(t)}{d t}}d \mathbf{w}\end{aligned}\).
- Reverse SDE:
- \(\begin{aligned} d \mathbf{x}&=\left[\mathbf{f}(\mathbf{x}, t)-g(t)^2 \nabla_{\mathbf{x}} \log p_t(\mathbf{x})\right] d t+g(t) d \mathbf{w} \\& =-2 \sigma(t) \frac{d \sigma(t)}{d t} \nabla_{\mathbf{x}} \log p_t(\mathbf{x}) d t+\sqrt{2 \sigma(t) \frac{d \sigma(t)}{d t}} d \mathbf{w}\end{aligned}\).
(2) Backbone Architectures
Denoising prediction networks (parameters \(\theta\))
Discuss the formulation of \(\theta\) by several NN architectures
-
To approximate the score function
-
Map from the same input space to the same output space
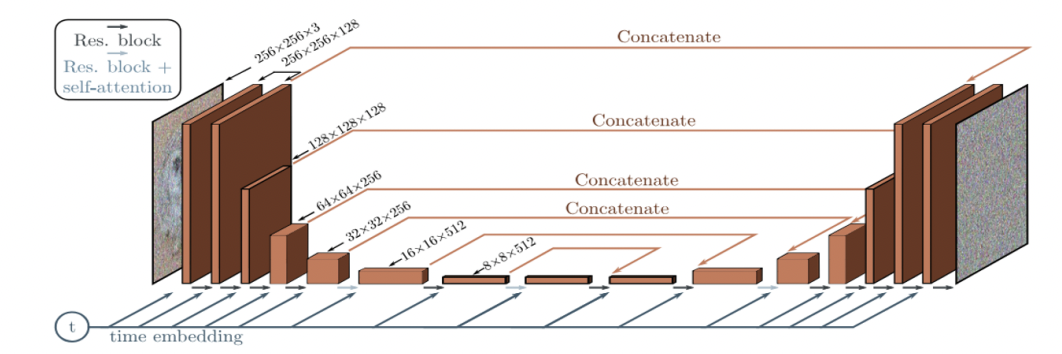
a) U-Net
[1] DDPM
- U-Net backbone (similar to an unmasked PixelCNN++)
- Originally used in semantic segmentation
-
DDPMs: Operate in the pixel space
\(\rightarrow\) Training and inference: computationally expensive
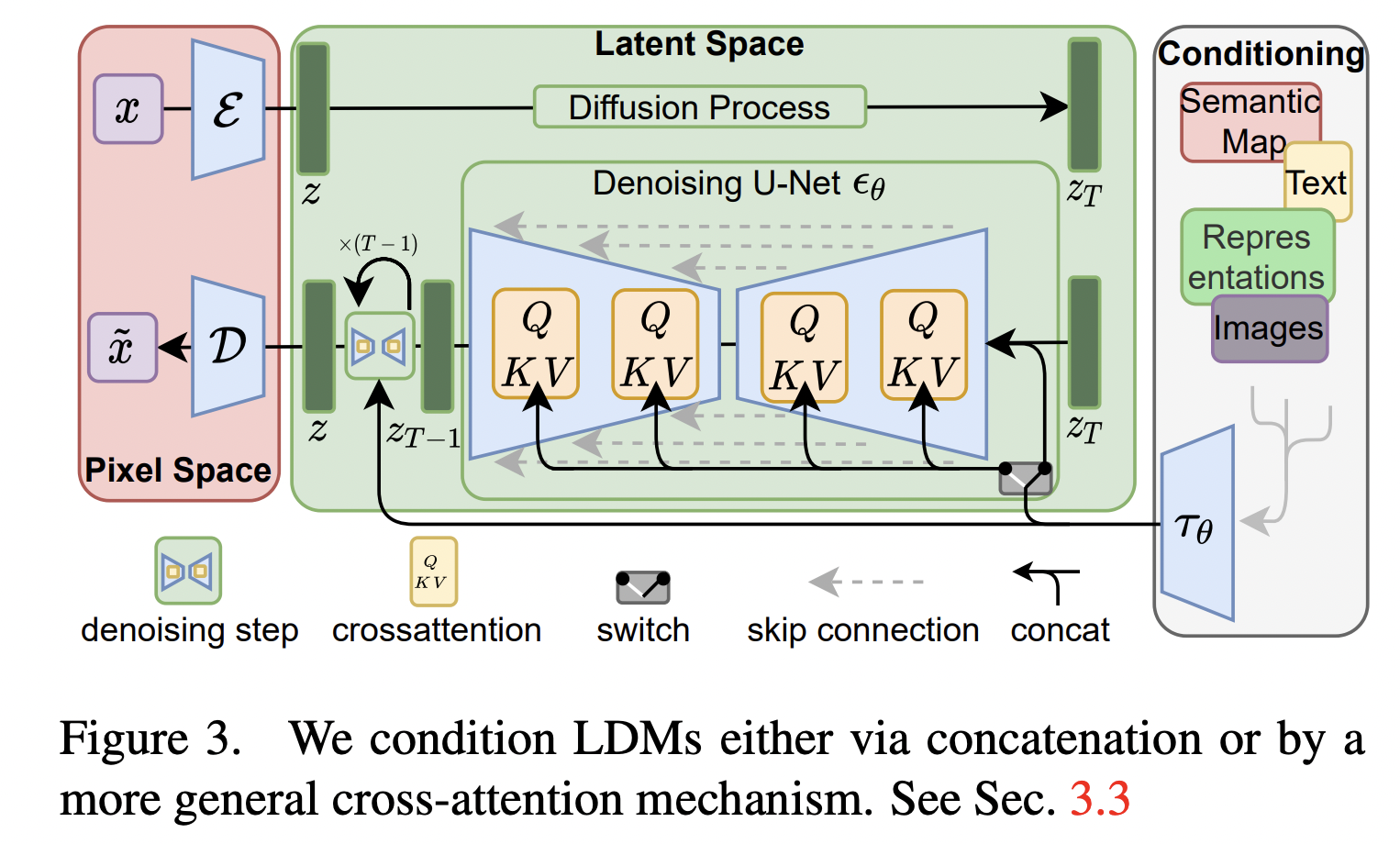
[2] Latent Diffusion Models (LDMs)
-
Operate in the latent space of a pre-trained VAE
( = Diffusion process is applied to the generated representation (instead of pixel space))
\(\rightarrow\) Computational benefits without sacrificing generation quality!
-
Architecture: U-Net + Additional cross-attention
- For more flexible conditioned generation
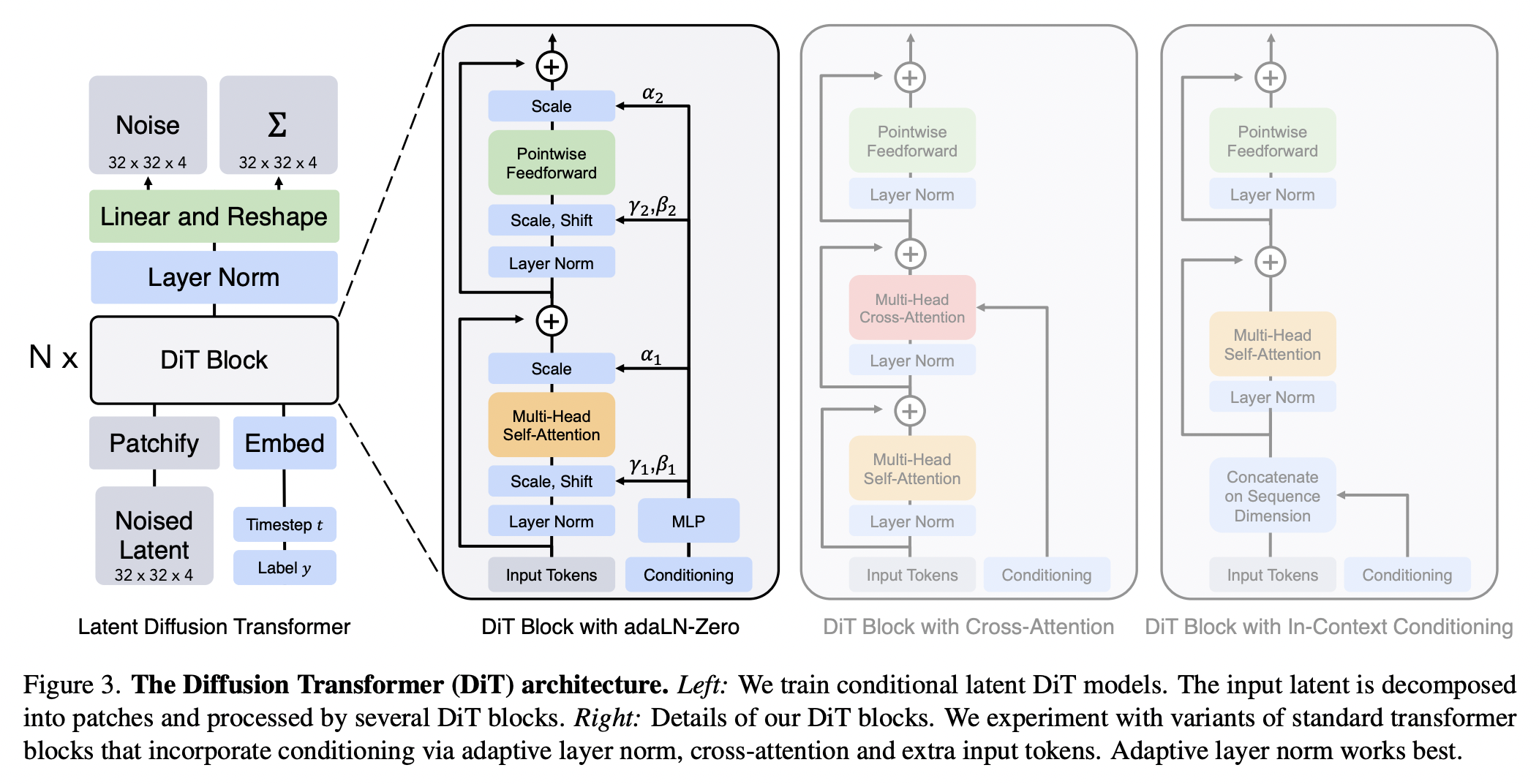
b) Transformer (e.g., ViT)
[1] Diffusion Transformers (DiT)
- Largely inspired by ViTs
- Transform input images into a sequence of patches!
-
Demonstrates SOTA generation performance on ImageNet when combined with the LDM
- Details
- Into a sequence of tokens using a “patchify” layer
- Add ViT-style positional embeddings to all input tokens
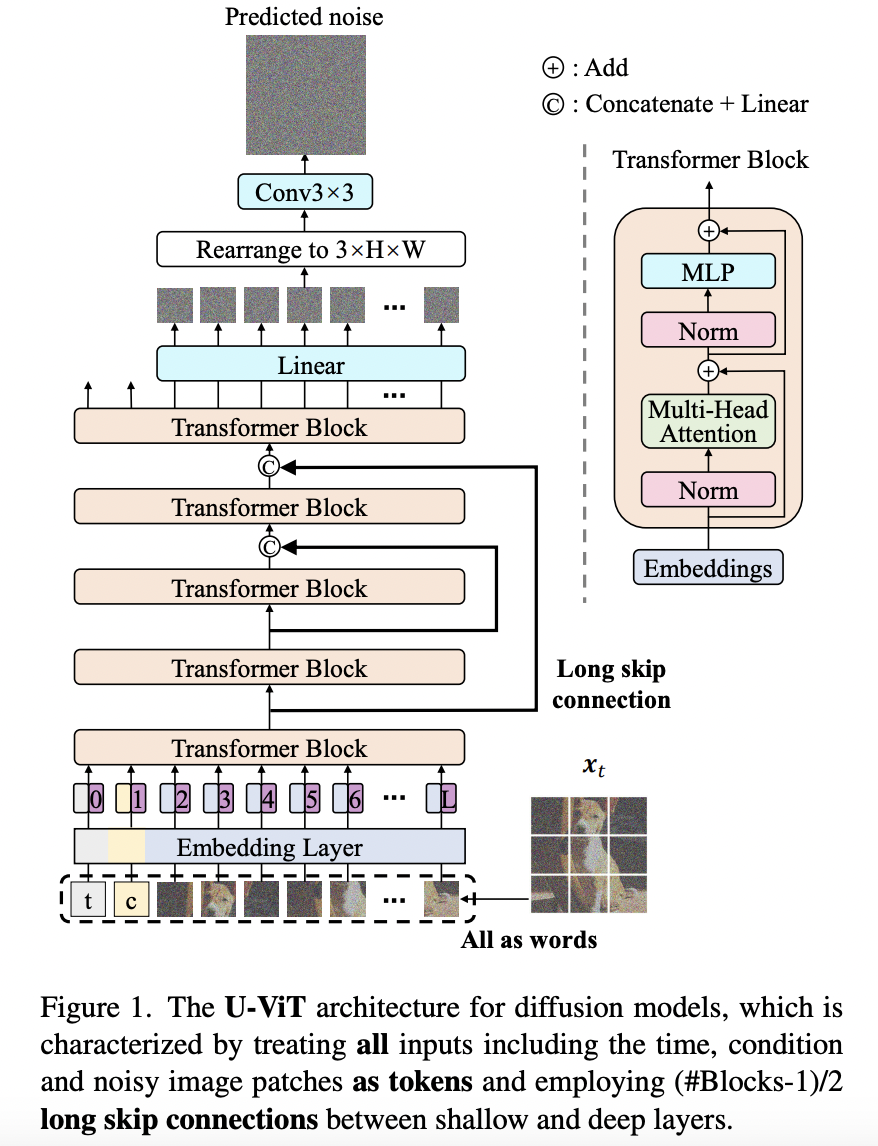
[2] U-ViTs
-
Unified backbone (U-Net + ViT)
-
(1) ViT: Design methodology of transformers in tokenizing time, conditioning and image inputs
-
(2) U-Net: Additionally employ long skip connections between shallow and deep layers
\(\rightarrow\) Provide shortcuts for low-level features \(\rightarrow\) Stabilize training of the denoising network
-
-
Results: On par with U-Net CNN-based architectures!
(3) Diffusion Model Guidance
Recent improvements in image generation:
\(\rightarrow\) By improved guidance approaches!
- Ability to control generation by passing user-defined conditions
- Guidance = modulation of the strength of the conditioning signal within the model
a) Conditioning signals
- Wide range of modalities
- e.g., Class labels, text embeddings to other images….
- Method 1) Naive way
- Concatenate the conditioning signal with the denoising targets
- Then pass the signal through the denoising network
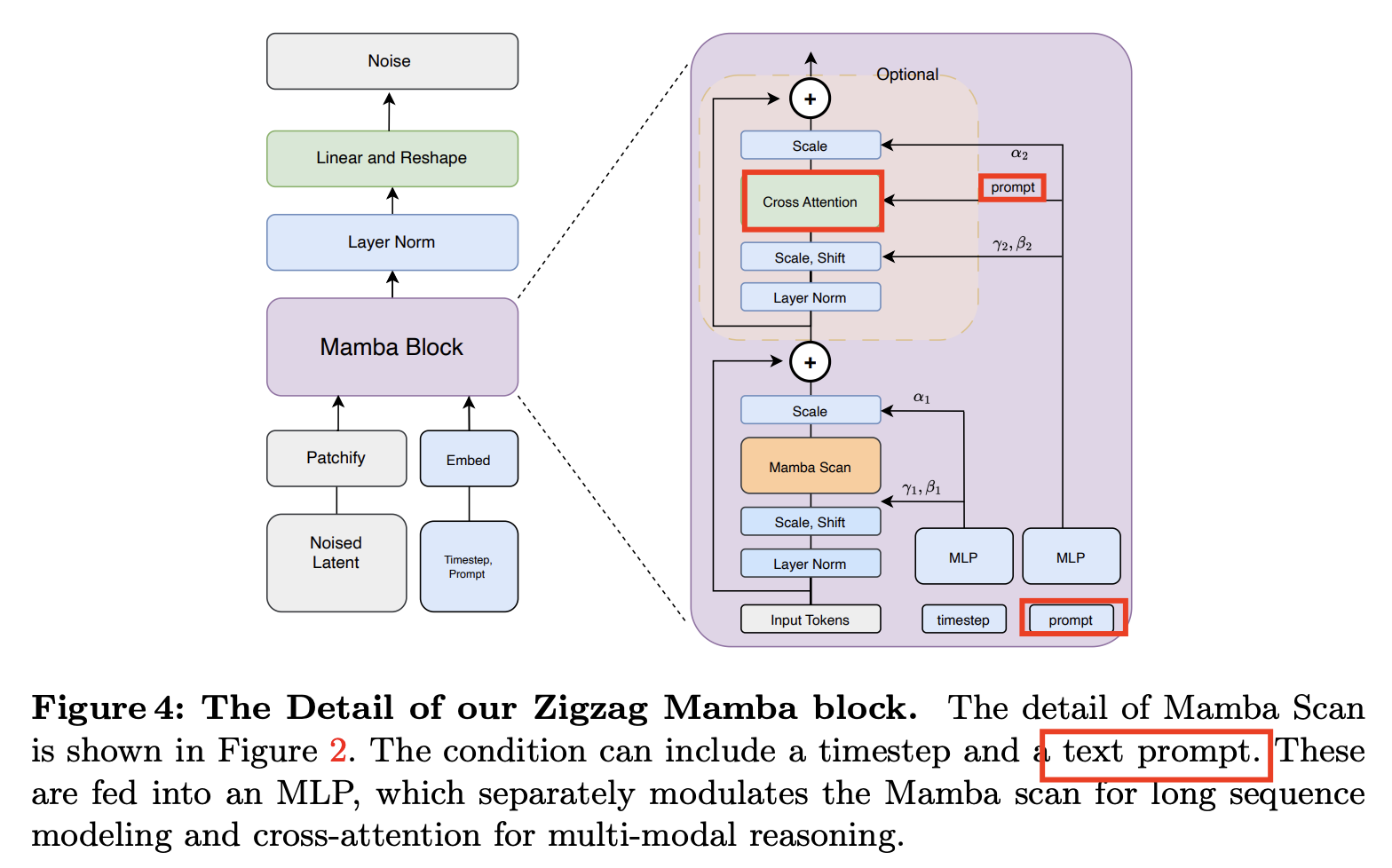
- Method 2) Cross-attention
- Conditioning signal \(\mathbf{c}\) is preprocessed by an encoder to an intermediate projection \(E(c)\)
- Then injected into the intermediate layer of the denoising network using cross-attention
- [76, 142]. These conditioning approaches alone do not leave the possibility
Method 1) Naive way
Method 2) Cross-attention
b) Classifier guidance (CG)
Compute-efficient method
How? Leveraging a (pre-trained) noise robust classifier
- Idea: Can be conditioned using the gradients of a classifier \(p_\phi\left(\mathbf{c} \mid \mathbf{x}_{\mathbf{t}}, t\right)\).
Gradients of the \(\log\)-likelihood of this classifier: \(\nabla_{\mathbf{x}_{\mathbf{t}}} \log p_\phi\left(\mathbf{c} \mid \mathbf{x}_{\mathbf{t}}, t\right)\)
\(\rightarrow\) Guide the diffusion process towards generating an image belonging to class label \(\mathbf{c}\).
Mathematical expressions
- Score estimator for \(p(x \mid c)\) :
- \(\nabla_{\mathbf{x}_{\mathbf{t}}} \log \left(p_\theta\left(\mathbf{x}_{\mathbf{t}}\right) p_\phi\left(\mathbf{c} \mid \mathbf{x}_{\mathbf{t}}\right)\right)=\nabla_{\mathbf{x}_{\mathbf{t}}} \log p_\theta\left(\mathbf{x}_{\mathbf{t}}\right)+\nabla_{\mathbf{x}_{\mathbf{t}}} \log p_\phi\left(\mathbf{c} \mid \mathbf{x}_{\mathbf{t}}\right)\).
- Noise prediction network:
- \(\hat{\epsilon}_\theta\left(\mathbf{x}_{\mathbf{t}}, \mathbf{c}\right)=\epsilon_\theta\left(\mathbf{x}_{\mathbf{t}}, \mathbf{c}\right)-w \sigma_t \nabla_{\mathbf{x}_{\mathbf{t}}} \log p_\phi\left(\mathbf{c} \mid \mathbf{x}_{\mathbf{t}}\right)\).
- where the parameter \(w\) modulates the strength of the conditioning signal.
- \(\hat{\epsilon}_\theta\left(\mathbf{x}_{\mathbf{t}}, \mathbf{c}\right)=\epsilon_\theta\left(\mathbf{x}_{\mathbf{t}}, \mathbf{c}\right)-w \sigma_t \nabla_{\mathbf{x}_{\mathbf{t}}} \log p_\phi\left(\mathbf{c} \mid \mathbf{x}_{\mathbf{t}}\right)\).
Summary
-
Classifier guidance is a versatile approach that increases sample quality!
-
But it is heavily reliant on the availability of a noise-robust pre-trained classifier
\(\rightarrow\) Relies on the availability of annotated data
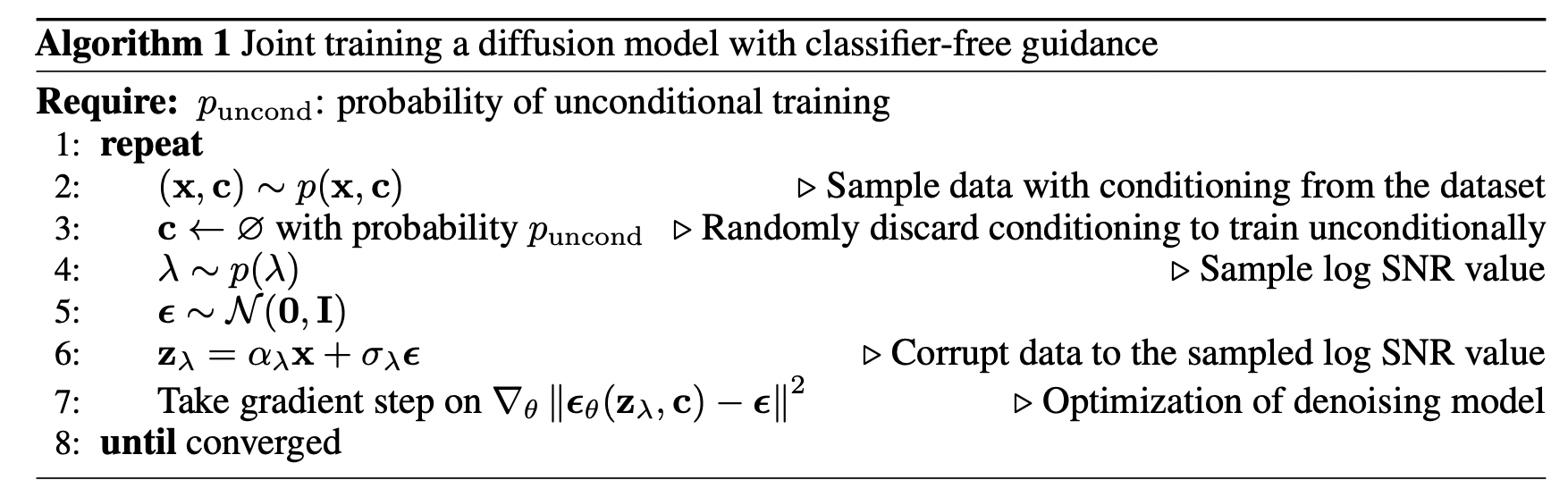
c) Classifier-free guidance (CFG)
Eliminates the need for a pre-trained classifier!
How? Single model \(\epsilon_\theta\left(\mathbf{x}_{\mathbf{t}}, t, \mathbf{c}\right)\).
- (1) Unconditional: \(\mathbf{c} = \phi\)
- Randomly dropping out the conditioning signal with probability \(p_{\text {uncond }}\).
- (2) Conditional: \(\mathbf{c}\)
Sampling
-
Weighted combination of conditional and unconditional score estimates
-
\(\tilde{\epsilon}_\theta\left(\mathbf{x}_{\mathbf{t}}, \mathbf{c}\right)=(1+w) \epsilon_\theta\left(\mathbf{x}_{\mathbf{t}}, \mathbf{c}\right)-w \epsilon_\theta\left(\mathbf{x}_{\mathbf{t}}, \phi\right)\).
-
Does not rely on the gradients of a pre-trained classifier!
( But still requires an annotated dataset to train the conditional denoising network )
CG vs. CFG
- (CG) \(\hat{\epsilon}_\theta\left(\mathbf{x}_{\mathbf{t}}, \mathbf{c}\right)=\epsilon_\theta\left(\mathbf{x}_{\mathbf{t}}, \mathbf{c}\right)-w \sigma_t \nabla_{\mathbf{x}_{\mathbf{t}}} \log p_\phi\left(\mathbf{c} \mid \mathbf{x}_{\mathbf{t}}\right)\).
- (CFG) \(\tilde{\epsilon}_\theta\left(\mathbf{x}_{\mathbf{t}}, \mathbf{c}\right)=(1+w) \epsilon_\theta\left(\mathbf{x}_{\mathbf{t}}, \mathbf{c}\right)-w \epsilon_\theta\left(\mathbf{x}_{\mathbf{t}}, \phi\right)\).
d) Summary
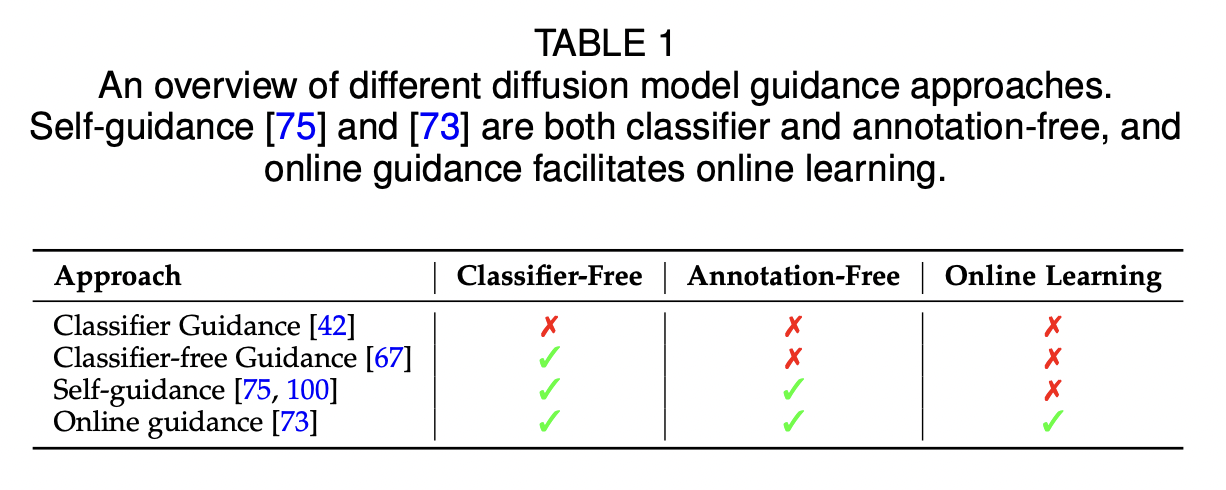
Classifier and classifier-free guidance
\(\rightarrow\) Controlled generation methods
Fully unconditional approaches?
- Recent works using diffusion model representations for SSL guidance!
- Do not need annotated data
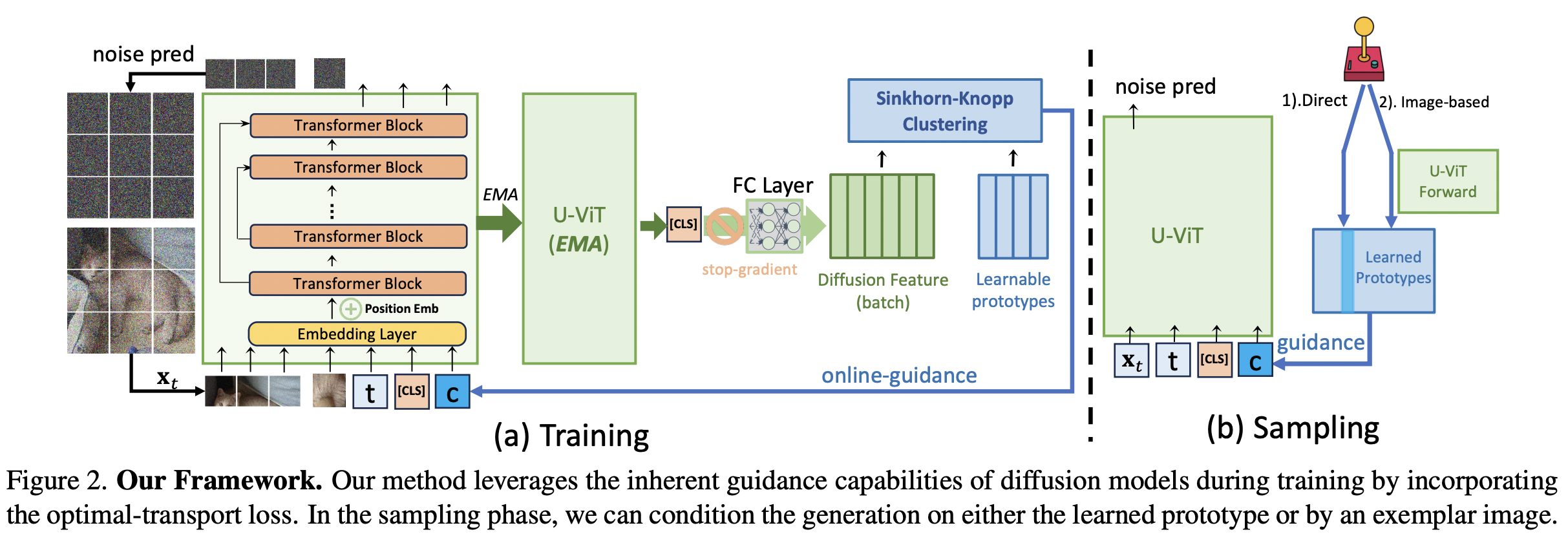
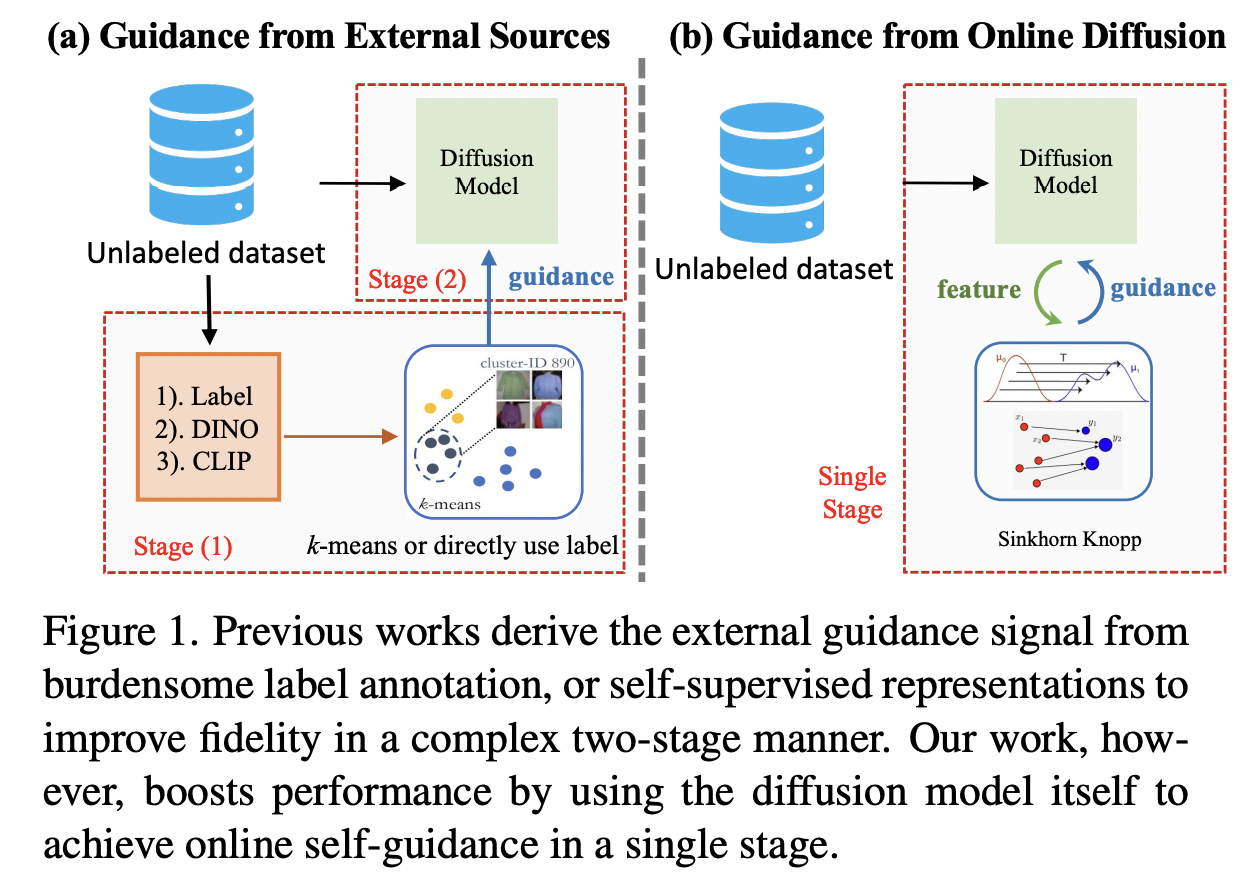
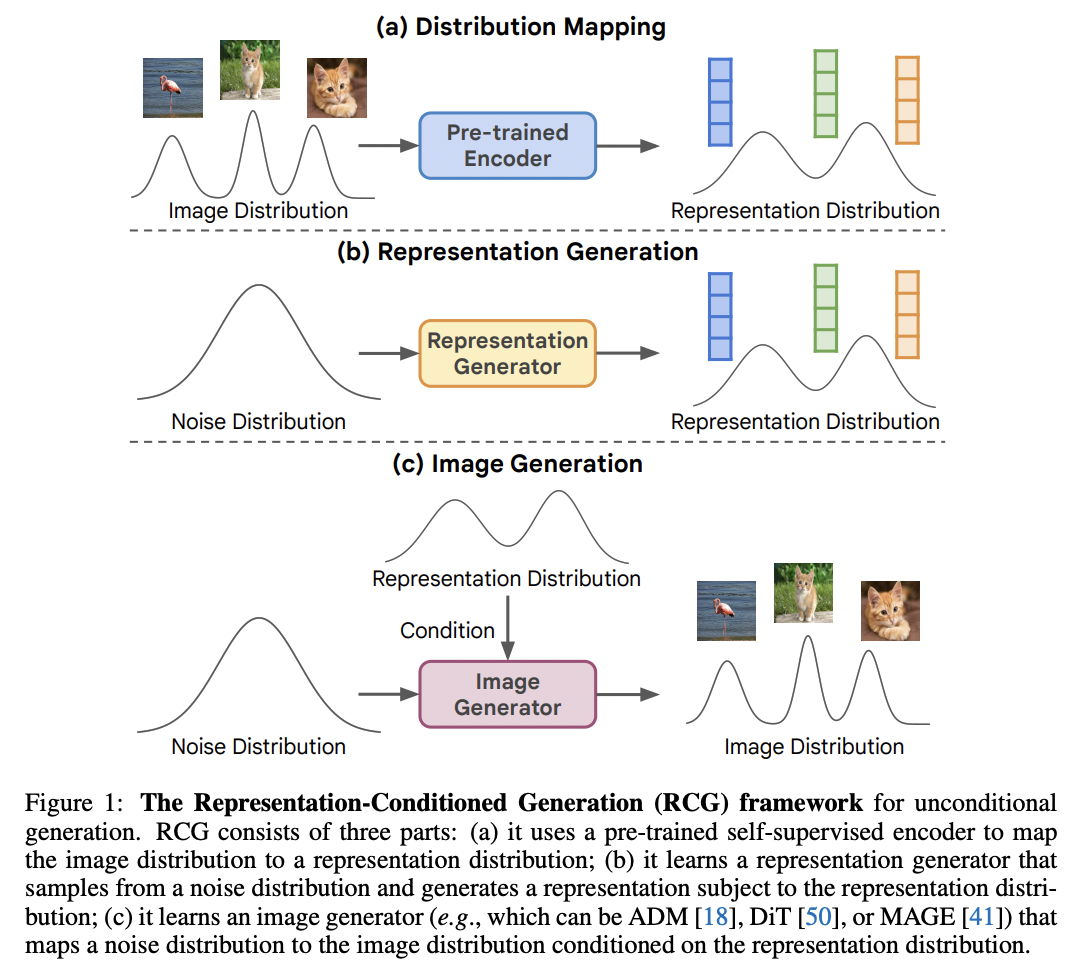
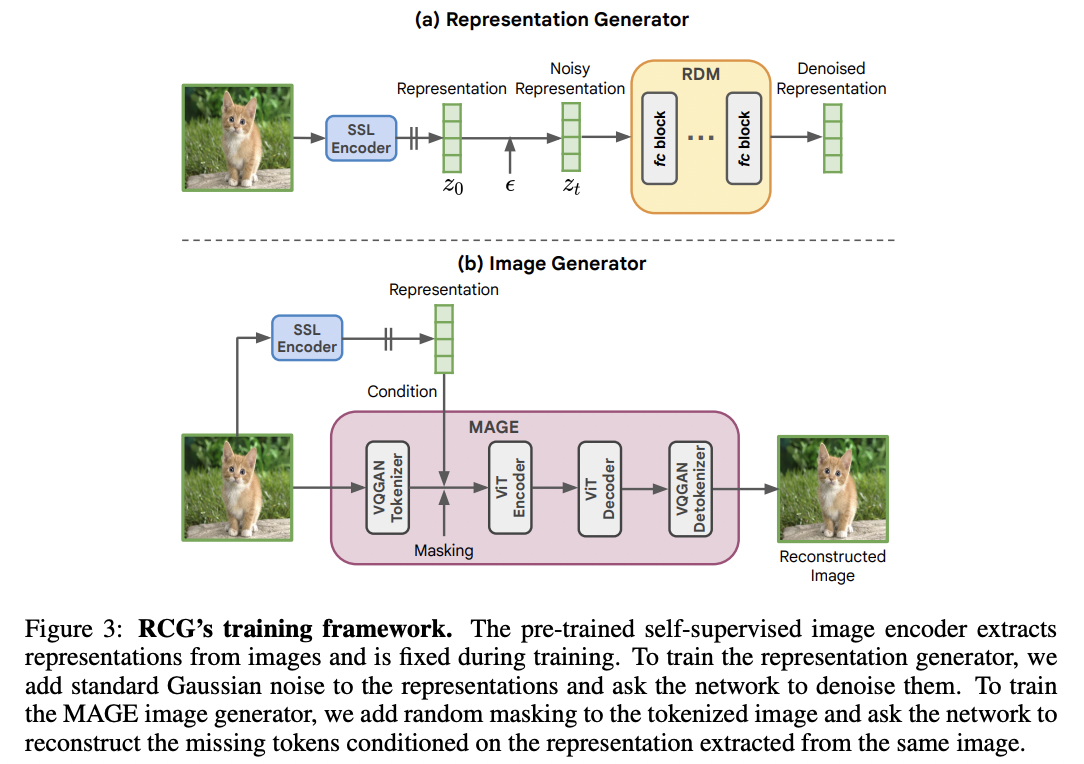
Representation-Conditioned Generation (RCG)