
[ Feature Extraction of signal data ]
Signal data에서 feature를 뽑아내는 대표적인 2가지 방법은 아래와 같다.
- 1) Fourier Transform
- 2) Mel-Frequency Cepstral Coefficients (MFCC)
이번 포스트에서는 우선 Fourier Transform에 대해서 다룰 것이다.
1. Before Fourier Transform….
Fourier Transform : “시간(time)의 영역에서 주파수(frequency)”의 영역으로 변환
( 푸리에 변환은 time(시간) 과 frequency(주파수)의 관점을 전환할 수 있게 해주는 중요한 것 )
보다 직관적인 이해를 위해….
ex) 속도를 “시간”과 “거리”의 관점에서 바라봄
- 100m 달리기를 몇초에 달려? \(\frac{? \text{seconds}}{100\text{ m}}= \frac{ \text{time}}{\text{distance}}\)
- 자동차가 얼마나 빨리 달려? \(\frac{? \text{km}}{1 \text{ hour}} = \frac{ \text{distance}}{\text{time}}\)
위 예시의 두 가지 경우 모두 “속도”에 대해서 이야기하지만, 하나는 “시간”의 관점에서, 하나는 “거리”의 관점에서 바라보았다.
이를 푸리에 변환과 연관시켜 생각해보면 아래와 같다.
-
(time 영역) cycle이 얼마나 빨리 일어나?
- \(\frac{ \text{time}}{\text{cycle}}\)= Period
-
(frequency 영역) 1초 동안 cycle이 얼마나 자주 일어나?
- \(\frac{ \text{cycle}}{\text{time (1s)}}\)= Hz
푸리에 변환을 통해서 알고자 하는 것을 쉽게 비유해서 설명하자면,
여러 과일이 섞여있는 스무디의 “과일의 구성 성분을 알려주는 것”이라고 보면 된다.
( ex 스무디 A = 딸기 30% + 바나나 50% + 사과 20% )
2. Introduction
푸리에 변환을 알기 위해서는 아래의 4가지 사항들에 대해서 잘 알아야 한다.
- 1) 푸리에 급수 (Fourier Series) : cos & sin을 엄청 많이 사용해서 어떠한 것을 만들까?
- 2) 오일리 공식 (Euler formula) : cos & sin을 “하나”로 표현해줌!
- 3) 적분 (Integration) : 리만 적분
- 4) 직교성 (Orthogonality) : 벡터의 내적이 아니라, “함수의 내적”!
\(\rightarrow\) “시간의 영역”에 있는 데이터를 “주파수의 영역”에 있는 영역으로 어떻게 옮길 수 있는지?
2-1. Fourier Series
아래의 식은 Foureir Seires(푸리에 급수)이다.
\[\hat{f}(x)=\frac{a_{0}}{2}+\sum_{n=1}^{\infty} a_{n} \cos \left(\frac{2 \pi n x}{T}\right)+\sum_{n=1}^{\infty} b_{n} \sin \left(\frac{2 \pi n x}{T}\right)\]위 식이 담고 있는 의미를 알아보자.
-
[Point 1] cos & sin을 무한히 사용해서 “주기성 함수”를 표현할 수 있다!
-
[Point 2] 직류 & 교류
- 직류(DC)를 나타내는 term : \(\frac{a_{0}}{2}\)
- 주기성 함수를 위/아래로 옮기는 상수
- 교류(AC)를 나타내는 term : \(\sum_{n=1}^{\infty} a_{n} \cos \left(\frac{2 \pi n x}{T}\right)+\sum_{n=1}^{\infty} b_{n} \sin \left(\frac{2 \pi n x}{T}\right)\) (반복을 하는 주기성을 가짐)
- 주기는 sin & cos를 섞어서(혹은 하나만 사용하여) 나타낼 수 있다!
 .
. - 직류(DC)를 나타내는 term : \(\frac{a_{0}}{2}\)
-
[Point 3] Noise처럼 보이는 어떠한 함수도 Fourier Series로 나타낼 수 있다!
2-2. Euler formula
아래는 식은 Euler Formula (오일러 공식)이다.
\[e^{+i \omega t}=\cos (\omega t)+i \sin (\omega t)\]위 식이 담고 있는 의미를 알아보자.
-
[Point 1] cos & sin을 하나로 나타내줌 ( using 지수 함수 )
-
[Point 2] 오일러 공식이 왜 중요한가?
-
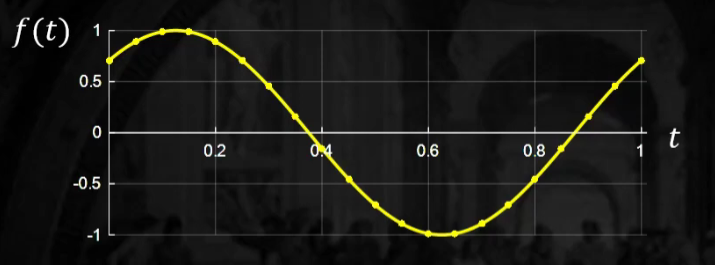
Sine 함수
-
기본 sine 함수 ) \(f(t)=1 * \sin (2 \pi * t)\)
-
위의 그림처럼 해주기 위해서는….
( 위상 + ) \(f(t)=1 * \sin (2 \pi *(t+\varphi))\)
( 왼쪽으로 움직임 , where \(\varphi>0\) )
-
-
Cosine 함수
-
기본 coinse 함수 ) \(f(t)=1 * \cos (2 \pi *t)\)
-
위의 그림처럼 해주기 위해서는….
( 위상 - ) \(f(t)=1 * \cos (2 \pi *(t-\varphi>0))\)
( 오른쪽으로 움직임, where \(\varphi>0\) )
-
-
위상을 사용하지 않아도 되는 방법?
(1) cosine & sine을 섞어서 사용하기
- \(f(t)=\frac{\sqrt{2}}{2} \sin (2 \pi * t)+\frac{\sqrt{2}}{2} \cos (2 \pi * t)\).
(2) Euler 함수 사용하기
- \(f(t)=1 * e^{i 2 \pi *(t-0.125)}\).
- 물리적으로 의미가 있는 부분을 가져오기 위해서는 “실수”부분을 가져오면 된다!
-
-
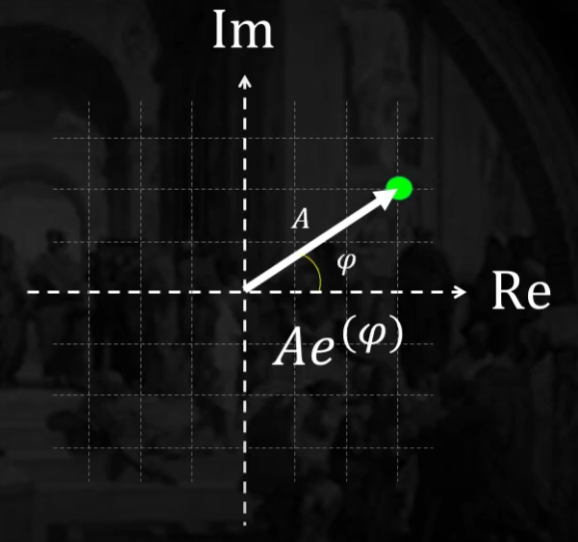
[Point 3] 따라서, 아래의 오일러 함수로 어떠한 주기성 함수도 표현할 수 있다
- \(f(t)=A * e^{i 2 \pi f *(t-\varphi)}\).
- \(A\) : 진폭
- \(f\) : 주파수
- \(\varphi\) : 위상
- \(f(t)=A * e^{i 2 \pi f *(t-\varphi)}\).
-
[Point 4] 오일러 함수가 Fourier Transform에서 유용한 또 다른 이유? “지수 함수”
- 미분/적분해도 지수 함수!
-
[Point 5] sine & cosine을 복소수 함수로 표현한다는 의미?
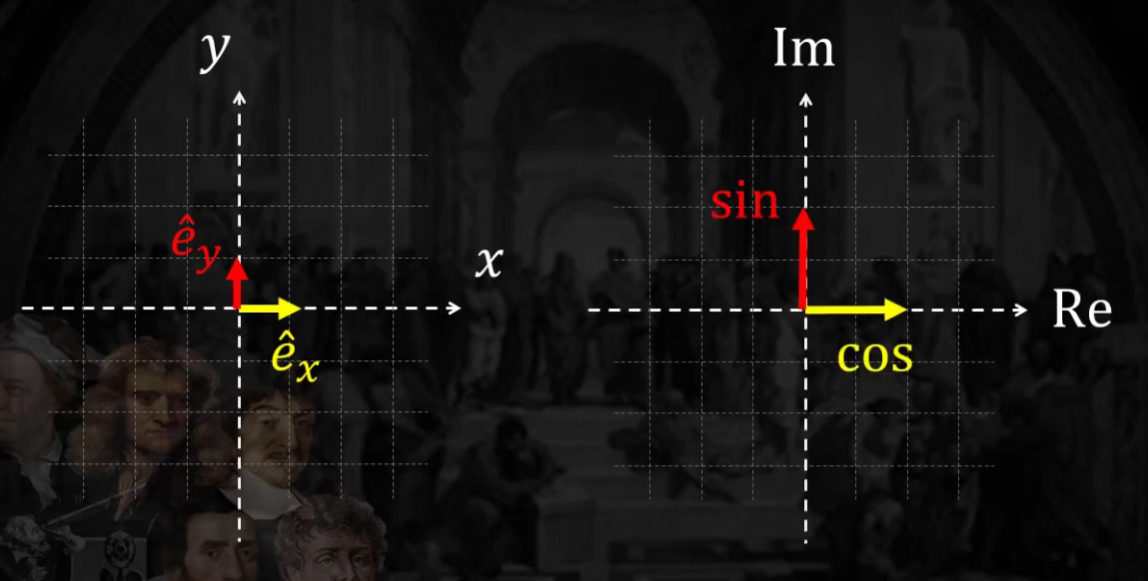
-
실수 부분은 cosine, 허수 부분은 sine으로 표현
-
즉, 어떠한 주기성 함수를 cosine & sine의 섞음으로 나타낼 수 있다!
-
2-3. Integration
SKIP
2-4. Orthogonality
우리에게 친숙한 벡터간의 직교성말고, 함수의 직교성에 대해서 알아볼 것이다. ( 그 직관은 크게 다르지 않다 )
내적을 구한다 = “연관성을 찾는다”
- 0 : 연관성 X
- 1 / -1 : 정/반대의 연관성 O
“함수”의 내적 & 직교성?
- 함수의 내적 : \(\langle\hat{f}, \hat{g}\rangle=\int f(t) g(t) d t\)
그림으로 이해하기
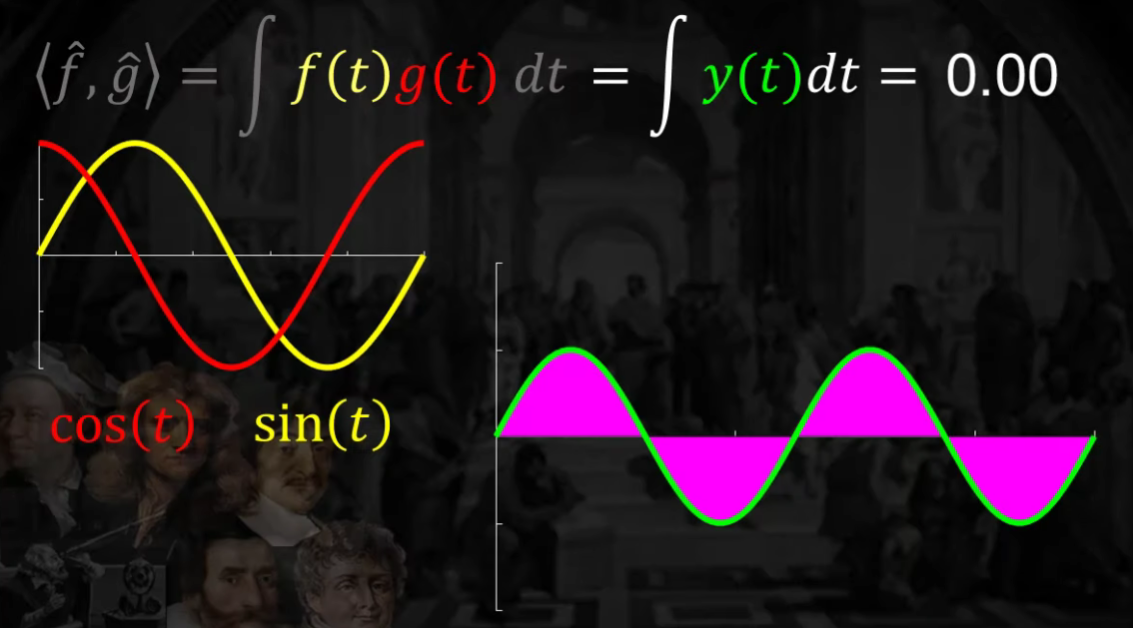
-
cosine과 sine이 직교(서로 연관성 X)하는 그림
-
\(\langle\hat{f}, \hat{g}\rangle=\int \sin (t) \cos (t) d t=0\).
-
왜 0이라는 사실이 중요한가?
기저벡터 2개가 연관성이 서로 없기 때문에 모든 좌표축의 벡터를 설명할 수 있는 것처럼,
cosine & sine도 마찬가지로 그러한 역할을 할 수 있다! 즉, 어떠한 주기성 함수도 설명할 수 있다!
-
2-5. Foureir Transform Example
오일러 공식을 사용하여 전개해보면…
\[\begin{array}{l} \hat{f}(\omega)=\int_{-\infty}^{\infty} f(t) e^{i \omega t} d t \\ \hat{f}(\omega)=\int_{-\infty}^{\infty} f(t)[\cos (\omega t)+i \sin (\omega t)] d t \\ \hat{f}(\omega)=\int_{-\infty}^{\infty} f(t) \cos (\omega t) d t+i \int_{-\infty}^{\infty} f(t) \sin (\omega t) d t \end{array}\]위의 식에서, 우선 sine함수만 사용하여 변환을 해볼 것이다. ( \(\int_{-\infty}^{\infty} f(t) \sin (\omega t) d t\) )
[ Example ]
\(F_1(t)\) 와 같은 data가 있다고 해보자. 이 data에 어떠한 주기성이 있는지를 알아보고자 한다.
그 기준점이 될 함수로 \(sin(2\pi \cdot f \cdot t)\)를 사용할 것이다. ( \(f\) : 주파수 )
주파수로 \(f=1\)을 놓을 것이다.
이 두 함수 ( \(F_1(t)\) 와 \(sin(2\pi \cdot 1 \cdot t)\) )를 곱한 뒤, 적분을 하는 것은, 이 두 함수 사이의 연관성을 찾는 것을 의미한다. 그 값은 0이 된다 ( when \(f=1\) )
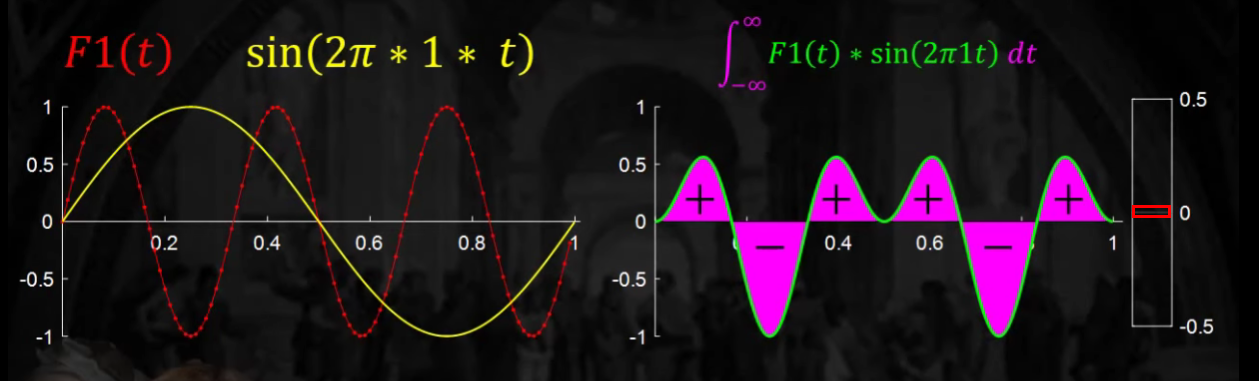
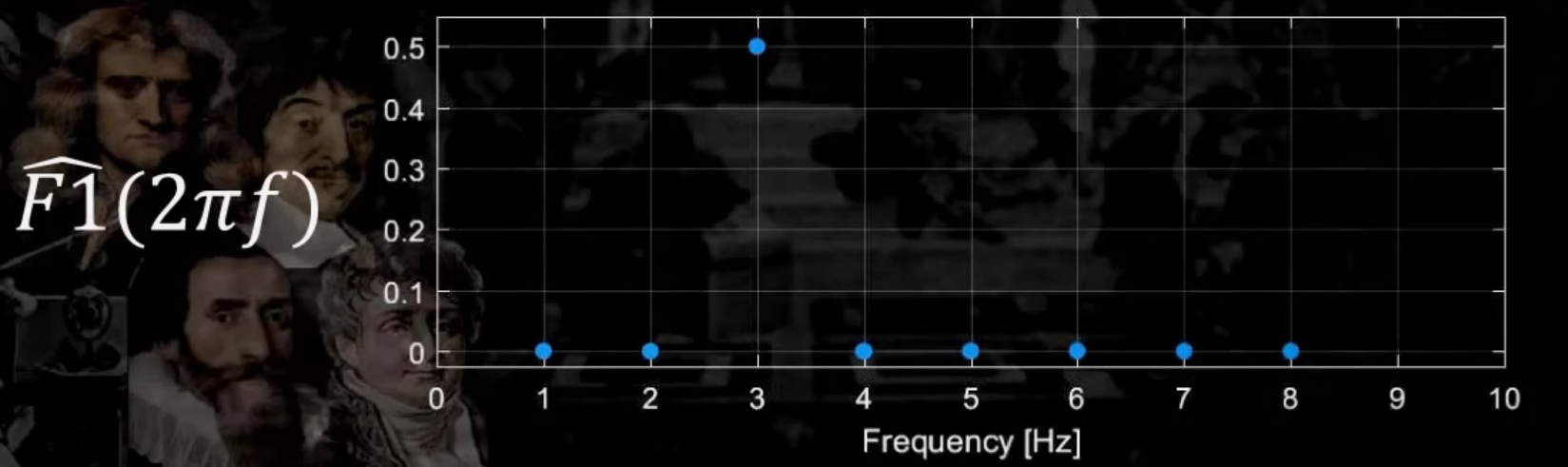
이와 같이, 주파수(\(f\) )를 늘려감에 따라 그 결과값을 아래와 같이 기록해갈 것이다.
이번엔, sine 함수 두개를 1 & 0.5 만큼 섞어서 나타내본 결과이다.
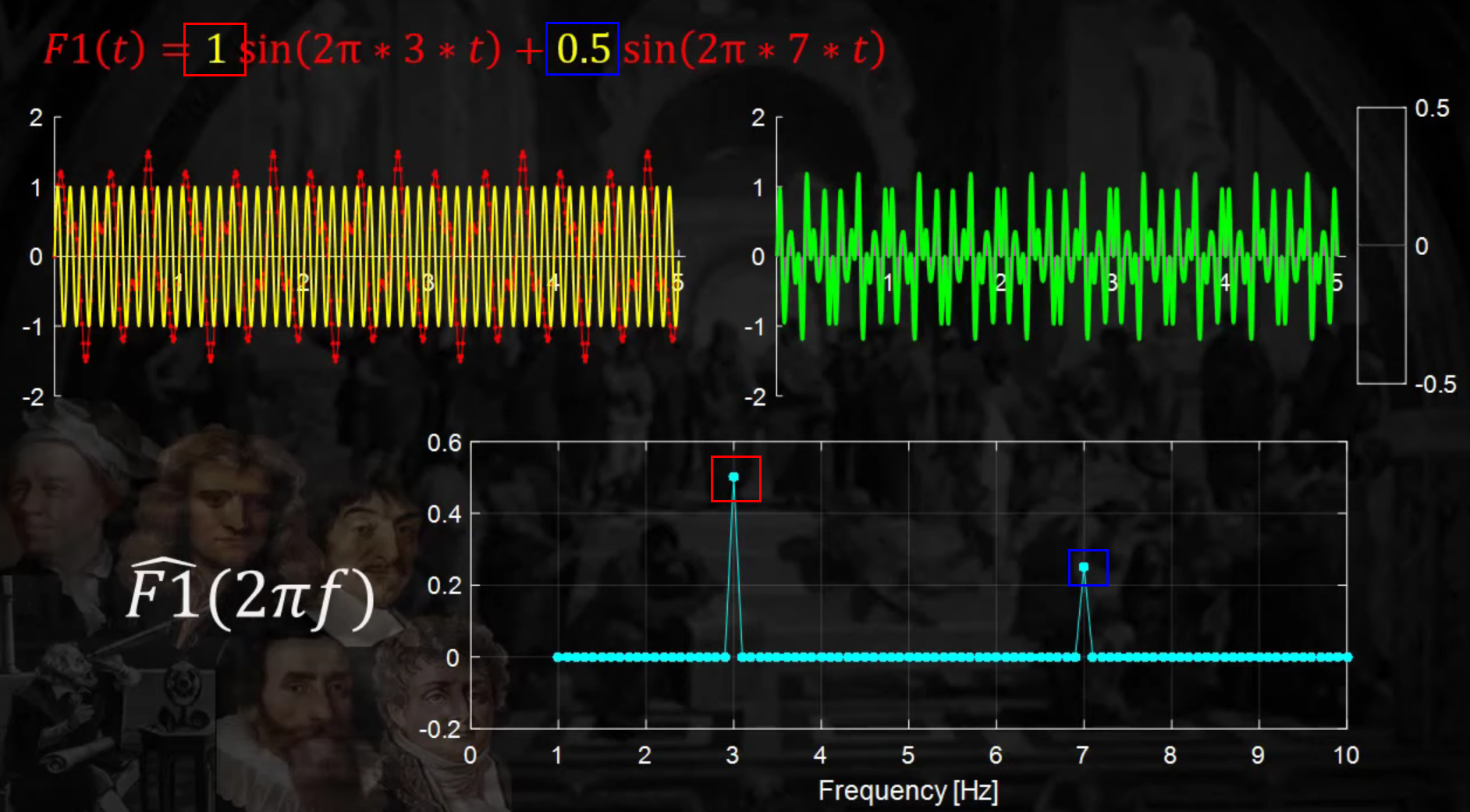
- (빨간색) 계수 : 1 , 변환 결과값 : 0.5
- (파란색) 계수 : 0.5, 변환 결과값 : 0.25
- 절반밖에 캐치 못한 이유는? “cosine도 사용해야!”
따라서, sine & cosine 두 개를 섞어서 사용하면 아래와 같다.
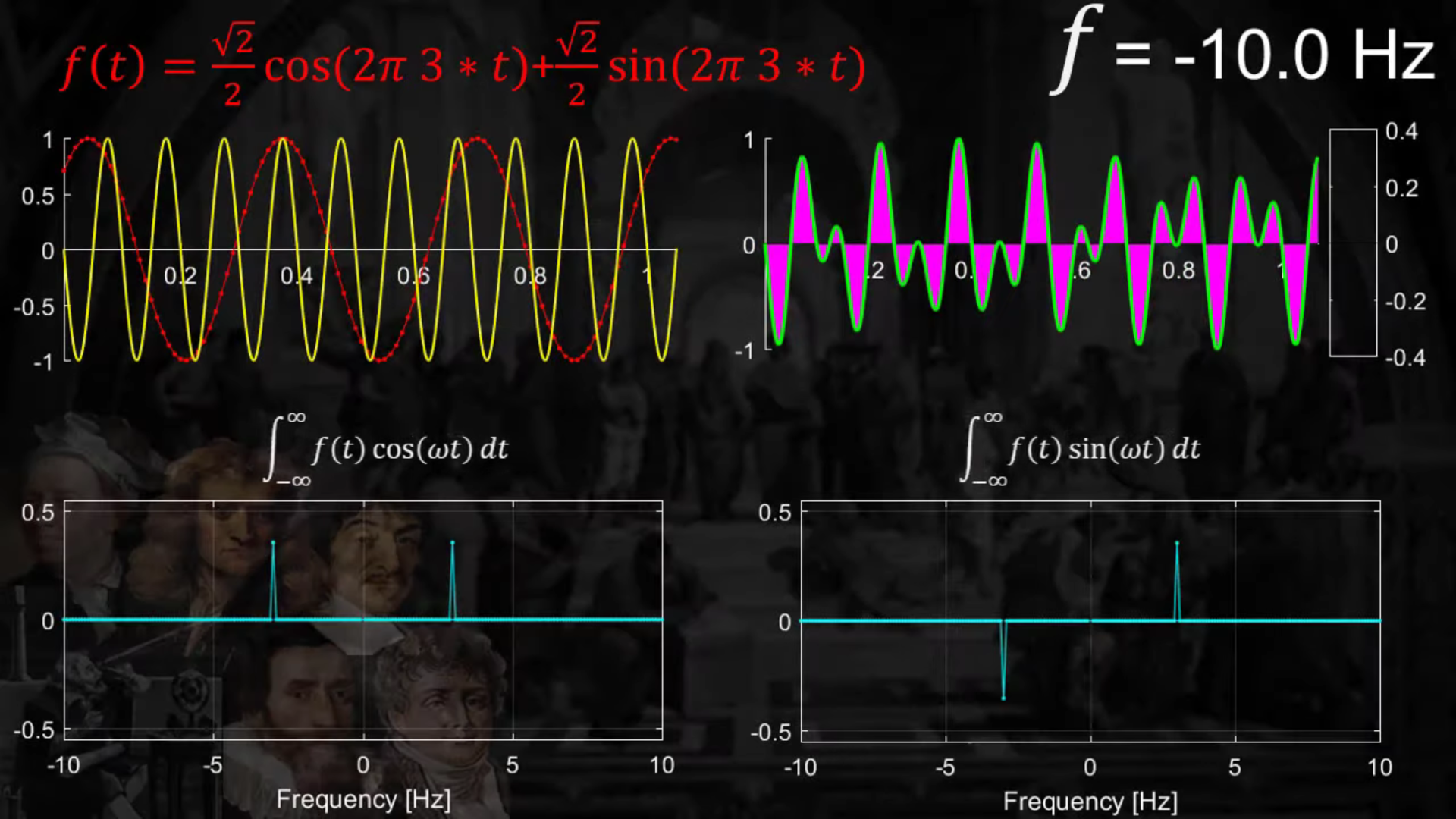
하지만 위 처럼 sine과 cosine을 따로따로 하지 않고, “오일러 공식”을 사용해서 한번에 할 수 있다!
- (before) \(\int_{-\infty}^{\infty} f(t) \cos (\omega t) d t, \quad \int_{-\infty}^{\infty} f(t) \sin (\omega t) d t\)
- (after) \(\int_{-\infty}^{\infty} f(t) * e^{i \omega t} d t\)
3. Fourier Transform 요약
( 앞으로 다룰 Fourier Transforms는 전부 DISCRETE Fourier Transform )
- time에 대한 함수 & frequency에 대한 함수를 연결해줌
- 특정 domain ( time or frequency )의 signal \(\rightarrow\) 특정 domain ( time or frequency )의 signal
- 용어 : Fourier Transform \(\leftrightarrow\) Inverse Fourier Transform
- 공식 :
- Fourier Transform : \(X_k =\sum_{n=0}^{N-1}x_n \cdot e^{\frac{-i 2\pi k n}{N}}\)
- Inverse Fourier Transform : \(x_n =\frac{1}{N}\sum_{k=0}^{N-1}X_k \cdot e^{\frac{-i 2\pi k n}{N}}\)
![]() .
.
Euler’s formula (오일러 공식)
- 삼각함수 & 지수함수에 대한 관계
- 공식 : \(\exp(i \theta)= \text{cos} \theta + i\cdot \text{sin} \theta\)
- 실수 part) \(\text{cos} \theta\)
- 허수 part) \(i\cdot \text{sin} \theta\)
- 오일러 등식 ( 위의 식에 \(\theta=\pi\) 대입 )
- \(\exp(i \theta)+1=0\).
- 복소 지수 함수 : \(cis(\theta) =\exp(i \theta)= \text{cos} \theta + i\cdot \text{sin} \theta\)
- 의미?
- \(\exp(i \theta)\) : 복소 평면 상 반지름이 1인 원
 .
.
Fourier Transform 공식 들여다보기
(Discrete) Fourier Transform : \(X_k =\sum_{n=0}^{N-1}x_n \cdot e^{\frac{-i 2\pi k n}{N}}\)
( 가정 : time \(\rightarrow\) frequency )
-
\(n\) : time index
-
\(x_n\) : time 도메인에서의 \(n\)번째 샘플
-
\(X_k\) : frequency 도메인에서의 \(k\)번째 Fourier Transform 결과
-
\(\frac{k}{N}\) : 각 속도 (angular velocity)
( 즉, 단위원이 얼마나 빠르게 회전하는지 )
(해석) \(X_k\) : time 도메인 신호에서 \(k/N\) 에 해당하는 주파수 성분
(Discrete) Fourier Transform 공식을 복소 지수 함수를 사용하여 다시 나타내기
\(\begin{aligned} X_k &=\sum_{n=0}^{N-1}x_n \cdot e^{\frac{-i 2\pi k n}{N}} \\ &=\sum_{n=0}^{N-1}x_n \cdot [\text{cos}(\frac{2\pi}{N}kn) - i \cdot \text{sin}(\frac{2\pi}{N}kn)]\end{aligned}\).
4. DFT Matrix
- Discrete Fourier Transform (DFT)를 matrix 형태로 나타낸 것
- 일종의 선형 변환으로 볼 수 있음 ( \(\vec{X}=W \cdot \vec{x}\) )
- notation
- \(x\) : time 도메인의 signal
- \(W\) : \(N \times N\)의 matrix
- row index : k
- column index : \(n\)
- \(W_{kn}\) : \(e^{\frac{-i 2\pi k n}{N}}\)
- 여기서 \(W\)를 DFT matrix라고 한다
 .
.
\(W=\frac{1}{\sqrt{N}}\left[\begin{array}{cccccc} 1 & 1 & 1 & 1 & \cdots & 1 \\ 1 & \omega & \omega^{2} & \omega^{3} & \cdots & \omega^{N-1} \\ 1 & \omega^{2} & \omega^{4} & \omega^{6} & \cdots & \omega^{2(N-1)} \\ 1 & \omega^{3} & \omega^{6} & \omega^{9} & \cdots & \omega^{3(N-1)} \\ \vdots & \vdots & \vdots & \vdots & \ddots & \vdots \\ 1 & \omega^{N-1} & \omega^{2(N-1)} & \omega^{3(N-1)} & \cdots & \omega^{(N-1)(N-1)} \end{array}\right]\).
where \(\omega=\exp (-2 \pi i / N)\)
5. Fast Fourier Transform (FFT) with numpy
FFT (Fast Fourier Transform) refers to a way the discrete Fourier Transform (DFT) can be calculated efficiently (numpy)
- 직접 구현한
discrete_fourier_transform
import matplotlib.pyplot as plt
X_time=np.sin(np.arange(256))
def discrete_fourier_transform(X):
N = len(X)
n = np.arange(0,N)
k = n.reshape(N,1)
W = np.exp(-2j * np.pi * k * n / N)
return np.dot(W,X)
- numpy에서 제공하는
np.fft.fftX_freq1.real: 실수 부분X_freq1.imag: 허수 부분
X_freq1 = discrete_fourier_transform(X_time)
X_freq2 = np.fft.fft(X_time)
real_part=X_freq1.real
imag_part=X_freq1.imag
Reference
- https://ratsgo.github.io/speechbook/docs/fe/ft
- https://numpy.org/doc/stable/reference/generated/numpy.fft.fft.html#numpy.fft.fft
- https://www.youtube.com/watch?v=60cgbKX0fmE
- https://www.youtube.com/watch?v=wpHWGuof2nE