
( 참고 : Fastcampus 강의 )
[ 28. Policy Gradient 실습 1 ]
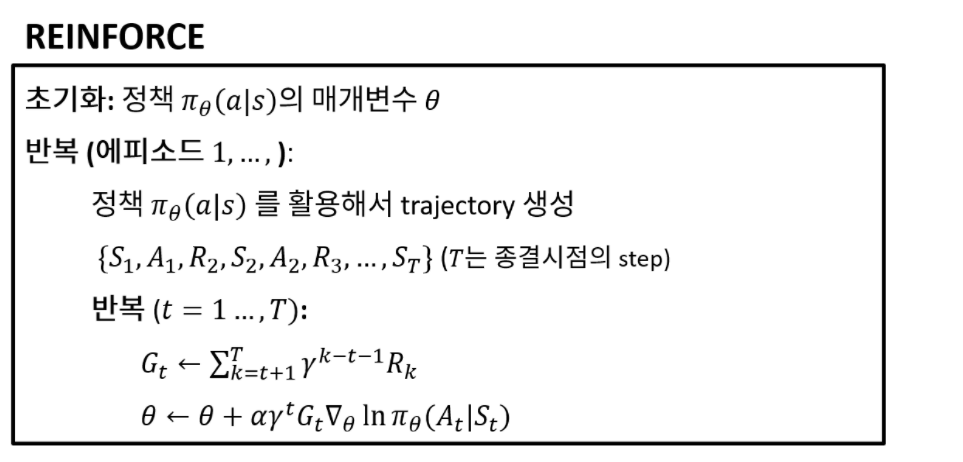
1. REINFORCE 복습
2. Import Packages
import sys; sys.path.append('..')
import gym
import torch
import matplotlib.pyplot as plt
from src.part3.MLP import MultiLayerPerceptron as MLP
from src.part4.PolicyGradient import REINFORCE
from src.common.train_utils import EMAMeter, to_tensor
import torch.nn as nn
from torch.distributions.categorical import Categorical
3. REINFORCE 알고리즘
(1) __init__
policy: 정책 ( 여기서 policy는 NN 모델로써, 계속 update할 것임 )gamma: discount rateopt: Adam optimizer_eps: to prevent numerical problems of logarithms
(2) get_action
- policy NN의 output은 “logit 형태”이다.
- 여기서 나온 logit 값을 기반으로 action을 샘플한다.
class REINFORCE(nn.Module):
def __init__(self,policy: nn.Module,gamma: float = 1.0,lr: float = 0.0002):
super(REINFORCE, self).__init__()
self.policy = policy
self.gamma = gamma
self.opt = torch.optim.Adam(params=self.policy.parameters(),lr=lr)
self._eps = 1e-25
def get_action(self, state):
with torch.no_grad():
logits = self.policy(state) # output : logit 형태
action_dist = Categorical(logits=logits)
action = action_dist.sample()
return action
4. Functions ( preprocess, update )
(1) _pre_process_inputs
연산의 효율성을 위해서, 들어온 episode ( S,A,R )를 reverse flip해주는 함수이다.
@staticmethod
-
class에서 method를 바로 호출할 수 있음
- self를 인자로 받지 않는다
- instance 속성에 접근할 수 없음 ( 필요 없을 때 주로 사용 )
- 순수 함수(pure function)를 만들 때 사용
@staticmethod
def _pre_process_inputs(episode):
s, a, r = episode
s = s.flip(dims=[0]) # [num.steps x state_dim]
a = a.flip(dims=[0]) # [num.steps]
r = r.flip(dims=[0]) # [num.steps]
return s, a, r
(2) update
-
매 time-step마다 update가 이루어짐 ( 실제로는 비효율적이지만, 실습을 위해서 구현 )
( 아래 코드를 보면, episode가 input으로 들어오고, update를 하기 위해 epsiode내의 각 time step을 (zip을 통해) 계속 뽑아냄을 알 수 있다 )
-
(식 A) \(G_{t} \leftarrow \sum_{k=t+1}^{T} \gamma^{k-t-1} R_{k}\)
-
(식 B) \(\theta \leftarrow \theta+\alpha \gamma^{t} G_{t} \nabla_{\theta} \ln \pi_{\theta}\left(A_{t} \mid S_{t}\right)\)
def update(self, episode):
S, A, R = self._pre_process_inputs(episode)
g = 0
for s, a, r in zip(S, A, R):
### (식 A)
g = r + self.gamma * g
### (식 B)
# minimize해야하는 LOSS이므로, '-'붙이기
action_dist = Categorical(logits=self.policy(s))
action_prob = action_dist.probs[a]
policy_grad_loss = - torch.log(action_prob + self._eps) * g
self.opt.zero_grad()
policy_grad_loss.backward()
self.opt.step()
5. Run Iterations
(1) Agent & Metric 정의
Agent ( REINFORCE 알고리즘 사용 )
- policy 모델로 MLP (hidden unit=128) 사용
net = MLP(s_dim, a_dim, [128])
agent = REINFORCE(net)
Metric : EMA ( Exponentially Moving Average )
ema = EMAMeter()
(2) Run
- 총 epsiode 횟수 : 10,000회 ( 500회 간격으로 결과 출력 )
n_episode = 10000
print_log = 500
for ep in range(n_episode):
# (1) Environment 초기화
s = env.reset()
# (2) epsiode 1회의 cumulative reward
cum_r = 0
# (3) Terminal state 도착할 때 break
states = []
actions = []
rewards = []
while True:
s = to_tensor(s, size=(1, 4))
a = agent.get_action(s)
s_, r, done, info = env.step(a.item())
states.append(s)
actions.append(a)
rewards.append(r)
s = s_
cum_r += r
if done:
break
ema.update(cum_r)
# (4) (print_log회마다) log 출력
if ep % print_log == 0:
print("Episode {} || EMA: {} ".format(ep, ema.s))
S = torch.cat(states, dim=0) # [num. steps x state dim]
A = torch.stack(actions).squeeze() # [num. steps]
R = torch.tensor(rewards) # torch.tensor [num. steps]
episode = (S, A, R)
agent.update_episode(episode, use_norm=True)