( 참고 : Fastcampus 강의 )
[ 30. Actor-Critic ( 가치 기반 + Policy Gradient ) ]
Contents
- REINFORCE vs Actor-Critic
- REINFORCE
- Actor Critic
- Q Actor-Critic
- Variance Reduction ( via Baseline )
- Baseline : \(V^{\pi}(s)\)
- Advantage Function
- Advantage Function 구현 1
- Advantage Function 구현 2
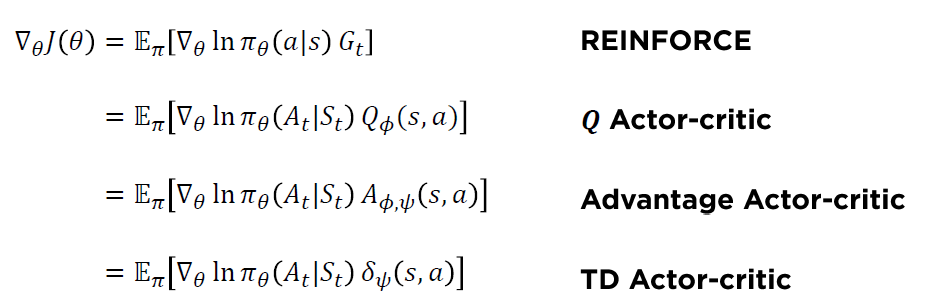
- 다양한 Policy Gradient 알고리즘들
1. REINFORCE vs Actor-Critic
우리는 policy의 gradient를 아래와 같이 구했었다.
\(\begin{aligned} \nabla_{\theta} J(\theta) &=\mathbb{E}_{\pi}\left[\nabla_{\theta} \ln \pi_{\theta}(a \mid s) Q^{\pi}(s, a)\right] \\ &=\mathbb{E}_{\pi}\left[\nabla_{\theta} \ln \pi_{\theta}\left(A_{t} \mid S_{t}\right) G_{t}\right] \end{aligned}\).
(1) REINFORCE
위 \(\nabla_{\theta} J(\theta)\) 에서, \(G_t\)는 아래와 같이 계산되었었고,
- \(G_{t} \leftarrow \sum_{k=t+1}^{T} \gamma^{k-t-1} R_{k}\),
따라서 \(\theta\)에 대한 updating equation은 아래와 같았었다.
- \(\theta \leftarrow \theta+\alpha G_{t} \nabla_{\theta} \ln \pi_{\theta}\left(A_{t} \mid S_{t}\right)\).
하지만 위 방법에 문제점이 있었다. Return인 \(G_t\)가 unbiased estimator이긴 하지만, variance가 크다는 문제점이 있었다 (\(\because\) Monte Carlo 방법)
(2) Actor-Critic
위의 문제를 어떻게 해결할까 하다가 나온 것이 바로 Actor Critic이다.
Actor Critic은, 위의 \(G_t\)를 학습을 통해서 배워보면 어떨까라는 관점에서 시작되었다.
[ key point ]
“학습된” 행동 가치 함수 (action-value function)인 \(Q_{\phi}^{\pi}(s, a)\)를 \(G_t\) 대신 사용하자!
- \(G_{t} \leftarrow Q_{\phi}^{\pi}\left(S_{t}, A_{t}\right)\).
- \(\theta \leftarrow \theta+\alpha \gamma^{t} G_{t} \nabla_{\theta} \ln \pi_{\theta}\left(A_{t} \mid S_{t}\right)\).
이름이 왜 Actor-critic ?
- actor가 상황(state)를 보고 행동(action)을 하고 …………. \(\pi_{\theta}(a \mid s)\)
- critic이 상황(state)과 actor의 행동(action)을 보고 감독(평가)를 함으로써, 보다 나은 행동을 하도록 만든다 …………. \(Q_{\phi}^{\pi}(s, a)\)
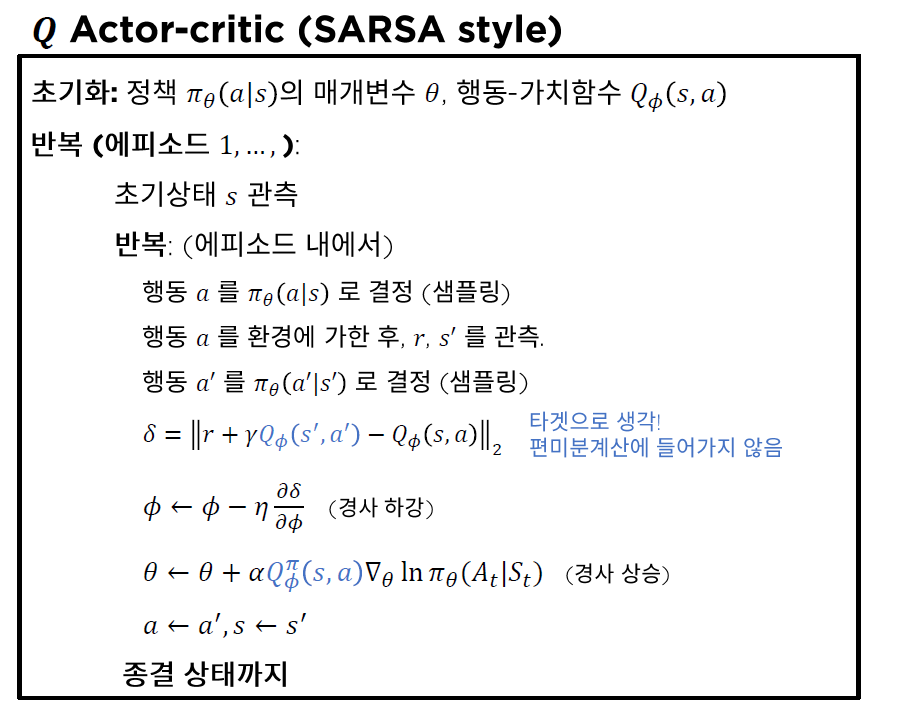
2. Q Actor-Critic
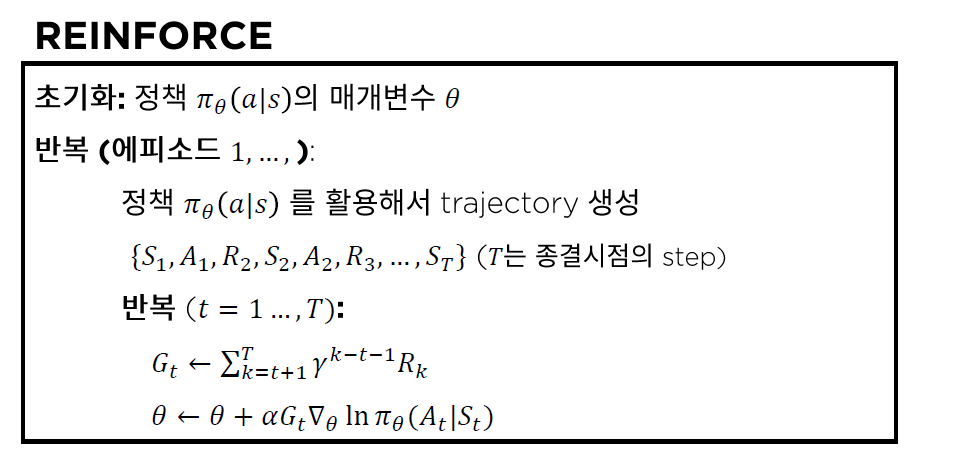
(revisit) REINFORCE
REINFORCE 알고리즘은 아래와 같다.
3. Variance Reduction ( via Baseline )
(1) Baseline : \(V^{\pi}(s)\)
REINFORCE 때에도 배웠지만, 우리는 gradient의 variance를 줄이기 위해 baseline을 빼줬었다.
이를 Actor-Critic에도 적용하자면, 아래와 같다.
\(\nabla_{\theta} J(\theta) \propto \sum_{s} d^{\pi}(s) \sum_{a \in \mathcal{A}} \nabla_{\theta} \pi_{\theta}(a \mid s)\left(Q^{\pi}(s, a)-b(s)\right)\).
- 여기서 \(b(s)\)는, \(a\) 와 무관한 이상, 그 어떠한 것도 가능하다. 하지만 이에 대해 제일 자연스러운 선택은 주로 \(V^{\pi}(s)\)이다.
(2) Advantage Function
Baseline을 \(V^{\pi}(s)\)로 생각하여, 이를 빼준 부분 ( \(Q^{\pi}(s, a)-b(s)\) )을 Advantage Function이라고 부른다.
그 이유는, 위 식의 의미를 생각해보면 꽤 직관적이다.
Advantage function : \(A^{\pi}(s, a)=Q^{\pi}(s, a)-V^{\pi}(s)\)
- 의미 : 특정 상황 \(s\)에서, 행동 \(a\)가 다른 행동들에 비해 얼마나 (상대적으로) 좋은가?
위 방법을 구현하는데에는 크게 2가지 방법이 있다.
(3) Advantage Function 구현 1
\(A^{\pi}(s, a) \approx Q_{\phi}^{\pi}(s, a)-V_{\psi}^{\pi}(s)\).
- 행동 가치 함수(\(Q^{\pi}(s, a)\)) & 상태 가치 함수( \(V^{\pi}(s)\)) 모두 모델링
- \(Q^{\pi}(s, a) \approx Q_{\phi}^{\pi}(s, a)\).
- \(V^{\pi}(s) \approx V_{\psi}^{\pi}(s)\).
- policy gradient : \(\nabla_{\theta} J(\theta)=\mathbb{E}_{\pi}\left[\nabla_{\theta} \ln \pi_{\theta}(a \mid s) A^{\pi}(s, a)\right]\)
단점 :
- 3개의 서로 다른 모델 \(Q_{\phi}^{\pi}(s, a), V_{\psi}^{\pi}(s), \pi_{\theta}(a \mid s)\) 을 학습해야 한다.
(4) Advantage Function 구현 2
( 결론 : TD error 사용을 통해, 위의 (3)과 달리, 2개의 모델만을 학습해도 된다 )
\(A^{\pi}(s, a)=\mathbb{E}_{\pi}\left[\delta^{\pi} \mid s, a\right]\).
-
(TRUE) TD error : \(\delta^{\pi}{=} r+V^{\pi}\left(s^{\prime}\right)-V^{\pi}(s)\)
-
(TRUE) 행동 가치 함수 : \(Q^{\pi}(s, a)=\mathbb{E}_{\pi}\left[r+\gamma V^{\pi}\left(s^{\prime}\right) \mid S_{t}=s, A_{t}=a\right]\)
-
[증명] (True) TD error 는 Advantage function 의 Unbiased Estimator
\(\begin{aligned} \mathbb{E}_{\pi}\left[\delta^{\pi} \mid s, a\right] &=\mathbb{E}_{\pi}\left[r+V^{\pi}\left(s^{\prime}\right) \mid s, a\right]-V^{\pi}(s) \\ &=Q^{\pi}(s, a)-V^{\pi}(s) \\ &=A^{\pi}(s, a) \end{aligned}\).
-
하지만, True TD Error는 알기 어려우므로, 아래와 같이 모델링한다.
- \(\delta_{\psi}=r+\gamma V_{\psi}^{\pi}\left(s^{\prime}\right)-V_{\psi}^{\pi}(s)\).
- \(\delta_{\psi}=r+\gamma V_{\psi}^{\pi}\left(s^{\prime}\right)-V_{\psi}^{\pi}(s)\).
2개의 서로 다른 모델 \(V_{\psi}^{\pi}(s), \pi_{\theta}(a \mid s)\) 만 학습하면 된다!
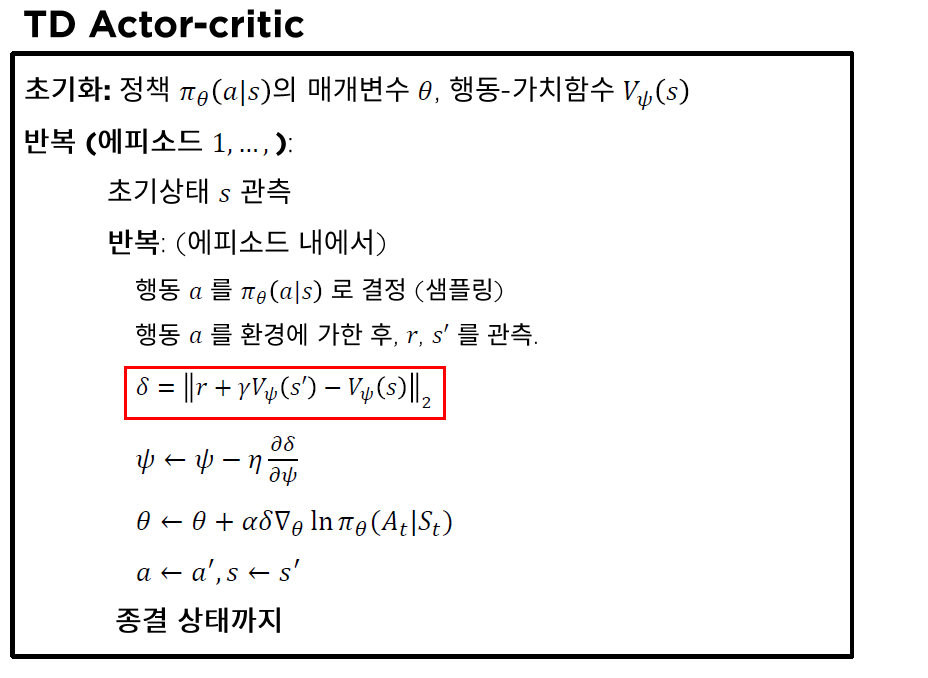
TD Actor Critic
4. 다양한 Policy Gradient 알고리즘들