Neural Oblivious Decision Ensembles for DL on Tabular Data
https://arxiv.org/pdf/1909.06312.pdf
Contents
- Abstract
Abstract
Heterogeneous tabular data…
\(\rightarrow\) advantage of DNN over shallow algorithms is questionable!
NODE (Neural Oblivious Decision Ensembles)
- new deep learning achitectures with any tabular data
- ensemble of oblivious DT
- (1) end-to-end GD training
- (2) power of multi-layer hierarchical representation learning
1. Introduction
SOTA : shallow models ( ex. XGBoost )
\(\rightarrow\) DL methods do not consistently outperform SOTA models
NODE
- inspired by CatBoost
- gradeint boosting on oblivious decision trees
- generalizes CatBoost
- make splitting feature choice & decision tree routing differentiable
- resembles “deep” GBDT trained end-to-end
- via entmax transformation, perform soft splitting effectively
2. Related Works
(1) SOTA for tabular
GBDT, XGBoost, LightGBM
(2) Oblivious Decision Trees
Oblivious Decision Trees
-
regular tree of depth \(d\)
-
constrained to use the same splitting feature& threshold in all internal nodes of the same depth
\(\rightarrow\) significantly weak learners & efficient
(3) Differentiable Trees
End-to-end optimization ( via softening decision functions )
(4) Entmax
maps a vector of real-valued scores to discrete prob distn
-
capable to produce sparse probability distns
( majority of probabilities are exactly equal to 0 )
learn splitting decisions based on a small subset of features
(5) Multi-layer non-differentaible architectures
Multi-layer GBDT (Feng et al., 2018)
- limitaiton: does not require each alyer compoenent to be differentiable
3. NODE
consists of differentiable ODT
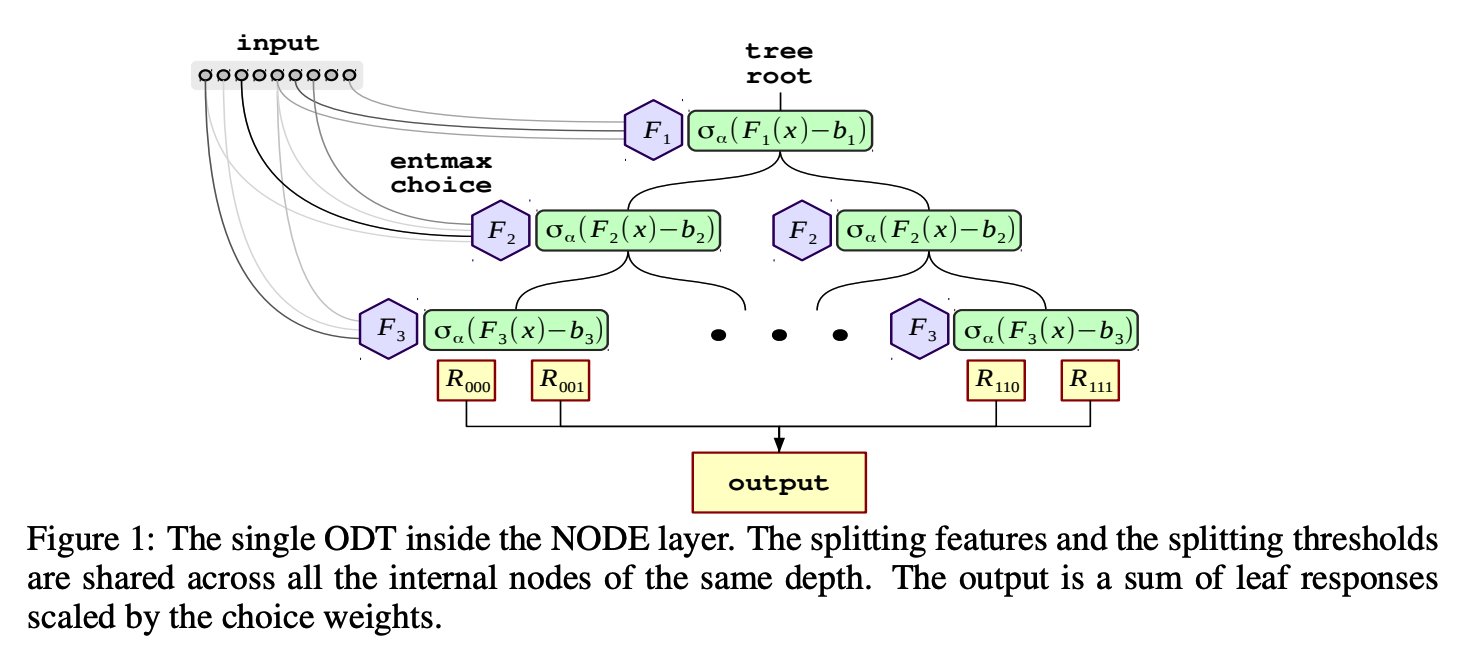
(1) Differentiable ODT
Notation
-
\(M\): number of ODT
-
\(d\) : depth of ODT
( = \(d\) splitting features = \(2^d\) possible responses )
-
\(n\) : number of (numeric) features
-
\(x \in \mathbb{R}^n\) : input vector
each ODT is determinbed by its ..
- splitting features \(f \in \mathbb{R}^d\)
-
splitting thresholds \(b \in \mathbb{R}^d\)
- \(d\)-dimensional tensor of responses \(R \in \mathbb{R}^{\underbrace{2 \times 2 \times 2}_d}\).
Output of ODT:
- \(h(x)=R\left[\mathbb{1}\left(f_1(x)-b_1\right), \ldots, \mathbb{1}\left(f_d(x)-b_d\right)\right]\).
- where \(\mathbb{1}(\cdot)\) denotes the Heaviside function.
To make trees differentiable ….
-
replace \(\mathbb{1}\left(f_i(x)-b_i\right)\) by their continuous counterparts
-
ex)
- REINFORCE (Williams, 1992)
- Gumbel-softmax (Jang et al., 2016)
\(\rightarrow\) require long training time… use \(\alpha\)-entmax transformation (Peters et al., 2019)
Entmax transformation
- replaced by a weighted sum of features
- weights : computed as entmax over the learnable feature selection matrix \(F \in \mathbb{R}^{d \times n}\) :
- \(\hat{f}_i(x)=\sum_{j=1}^n x_j \cdot \operatorname{entmax}_\alpha\left(F_{i j}\right)\).
Relax the Heaviside function \(\mathbb{1}\left(f_i(x)-b_i\right)\) as a two-class entmax
- \(\sigma_\alpha(x)=\operatorname{entmax}_\alpha([x, 0])\).
- use the scaled version: \(c_i(x)=\sigma_\alpha\left(\frac{f_i(x)-b_i}{\tau_i}\right)\)
- where \(b_i\) and \(\tau_i\) are learnable parameters for thresholds and scales respectively.
Based on the \(c_i(x)\) values, we define a “choice” tensor \(C \in \mathbb{R}^ \underbrace{2 \times 2 \times 2}_d\)
\(C(x)=\left[\begin{array}{c} c_1(x) \\ 1-c_1(x) \end{array}\right] \otimes\left[\begin{array}{c} c_2(x) \\ 1-c_2(x) \end{array}\right] \otimes \cdots \otimes\left[\begin{array}{c} c_d(x) \\ 1-c_d(x) \end{array}\right]\).
[ Final prediction ]
\(\hat{h}(x)=\sum_{i_1, \ldots i_d \in\{0,1\}^d} R_{i_1, \ldots, i_d} \cdot C_{i_1, \ldots, i_d}(x)\).
- weight : \(R\)
- response : \(C\)
[ Output of the NODE layer ]
\(\left[\hat{h}_1(x), \ldots, \hat{h}_m(x)\right]\).
( = concatenation of the outputs of \(m\) individual trees )
Multi-dimensional tree outputs
( Above: output = 1-dim )
For cls task, output = \(C\) -dim
\(\rightarrow\) multidimensional tree outputs \(\hat{h}(x) \in \mathbb{R}^{\mid C \mid}\)
- where \(\mid C \mid\) is a number of classes.
(2) Going Deeper with NODE
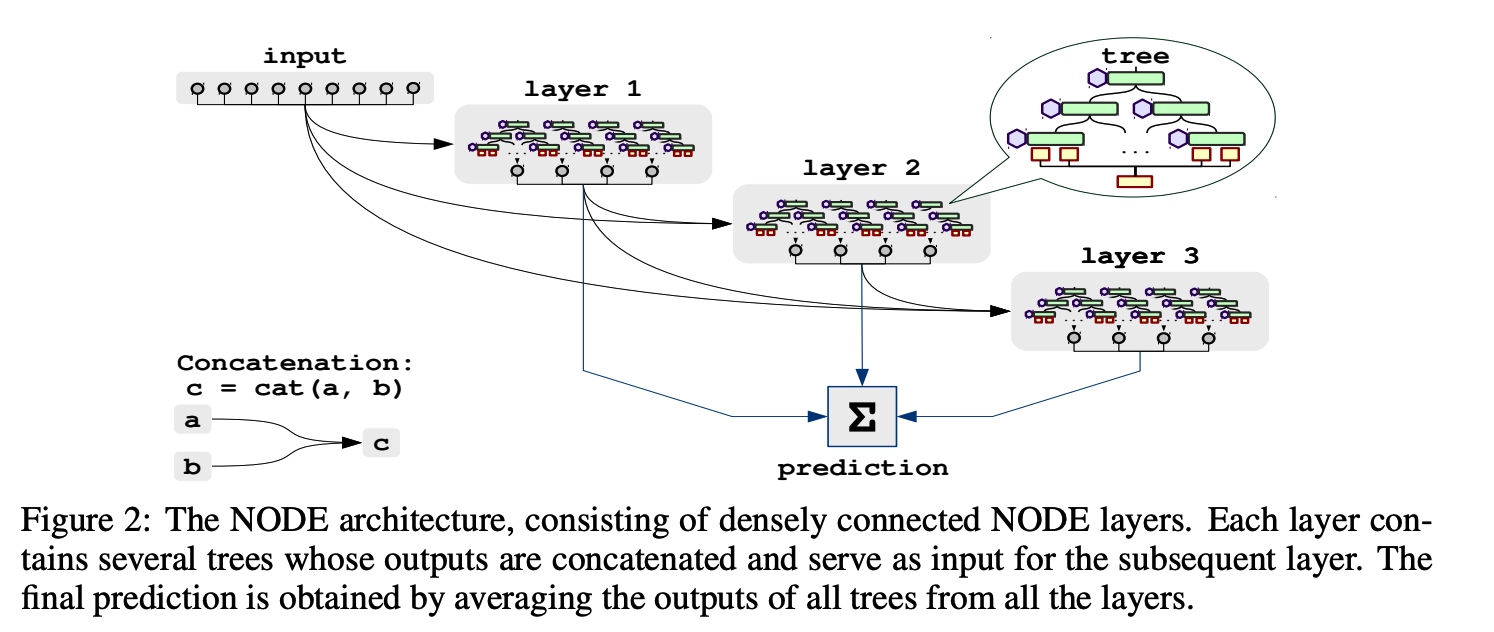
( Similar to DenseNet )
- sequence of \(k\) NODE layers
- concatenate all previous layers as its inputs
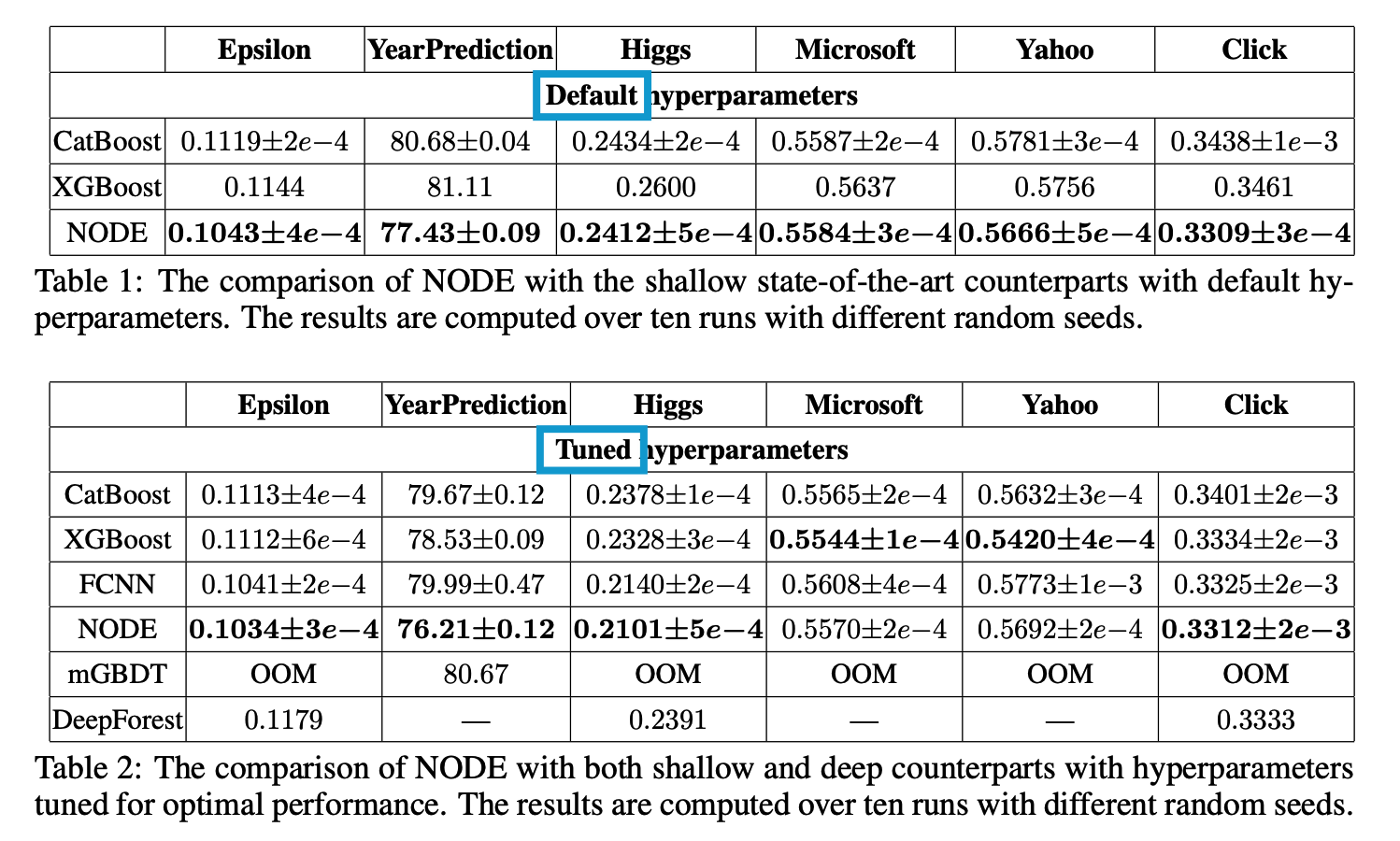
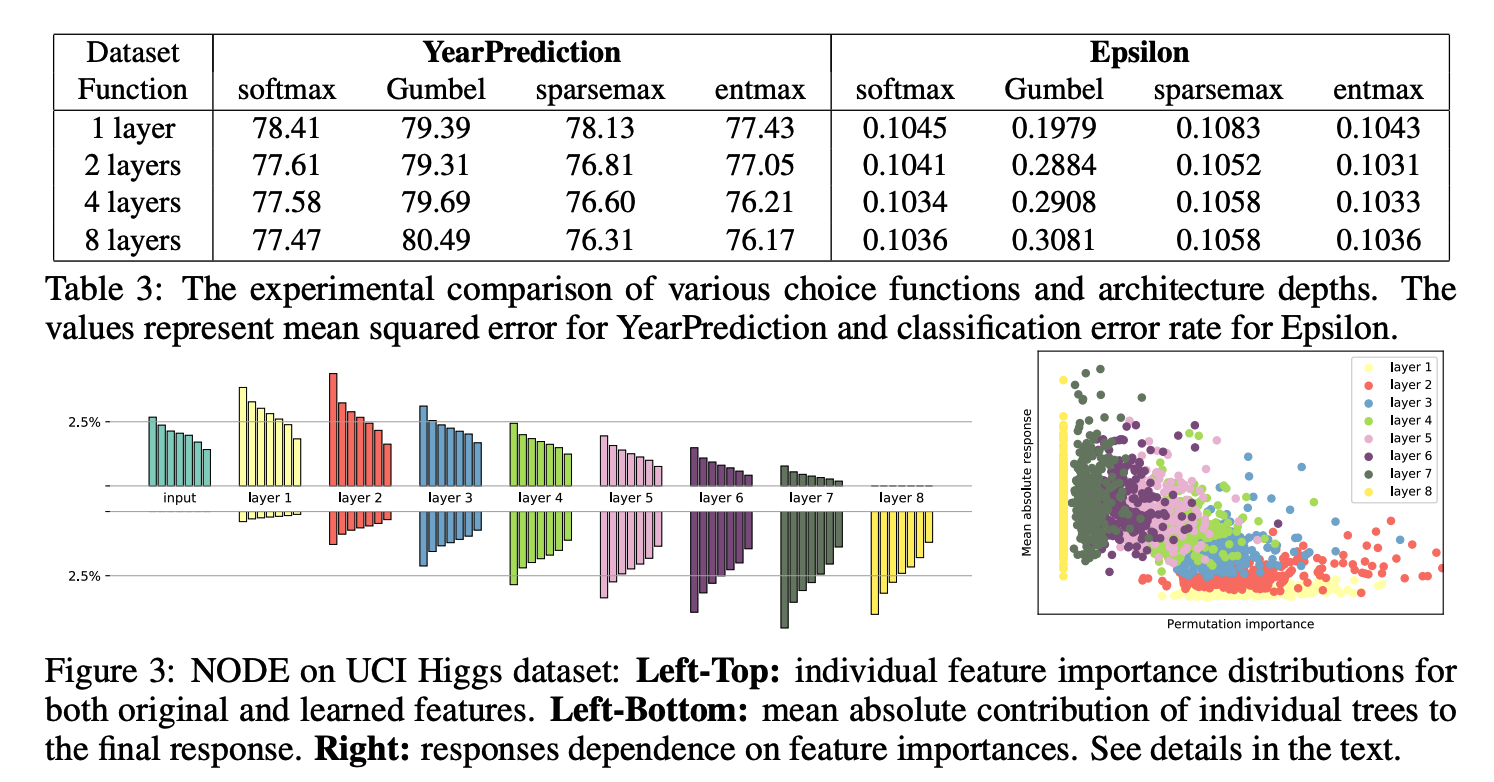
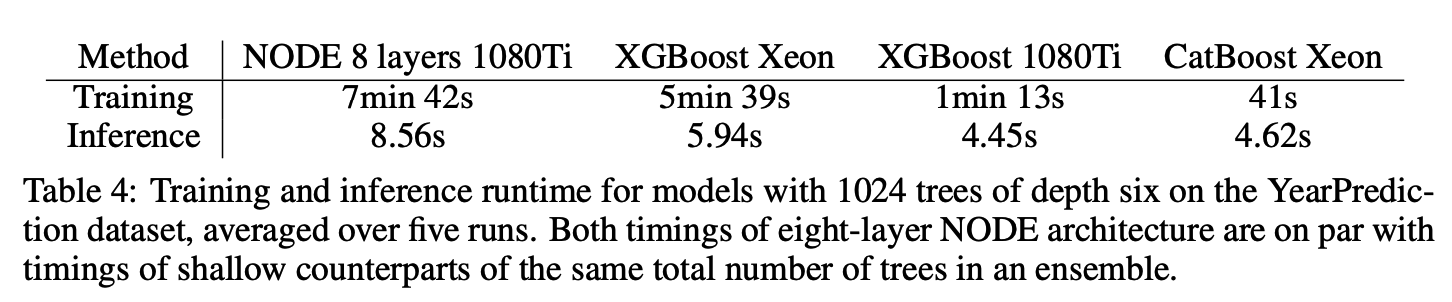
4. Experiments