
A Review on Outlier/Anomaly Detection in TS data
Contents
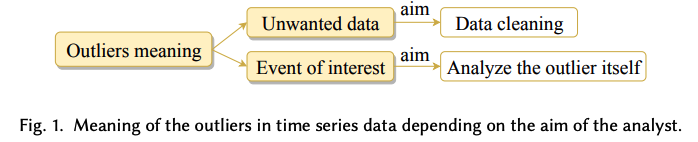
- Introduction
- Taxonomy of Outlier Detection Techniques in the TS context
- Input Data
- Outlier Type
- Nature of the method
- Point Outliers
- UTS
- MTS
- Sequence Outliers
1. Introduction
(1) Two types of outliers (in UTS)
- Type 1: Affects a SINGLE observation
- Type 2: Affects MULTIPLE observations
- Particular observation & subsequent observations.
\(\rightarrow\) Extended to 4 outlier types & to the case of MTS
(2) Classical Definition
“An observation which DEVIATES so much from other observations ~ generated by a DIFFERENT mechanism.”
(3) Section Intro
- Section 2 ) taxonomy for the classification of outlier detection techniques in TS
- Section 3 ~ 5 ) different techniques used for point, subsequence, and time series outlier detection
2. Taxonomy of Outlier Detection Techniques in the TS context
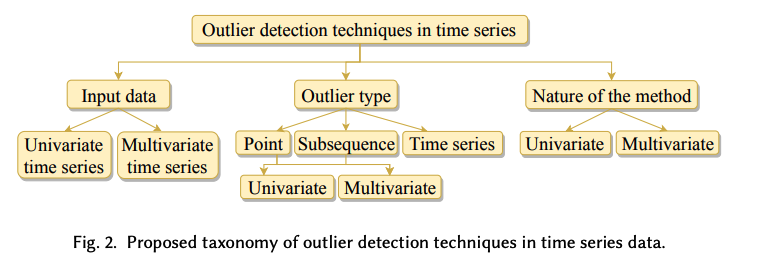
Outlier detection techniques: vary depending on the..
- (1) Input data type
- (2) Outlier type
- (3) Nature of the method
(1) Input Data
a) UTS : \(X=\left\{x_t\right\}_{t \in T}\)
- \(S=x_p, x_{p+1}, \ldots, x_{p+n-1}\) : subsequence of length \(n \leq \mid T \mid\)
b) MTS : \(\boldsymbol{X}=\left\{\boldsymbol{x}_t\right\}_{t \in T}\)
- Ordered set of \(k\) dim-vectors
- consists of \(k\) real-valued observations, \(\boldsymbol{x}_t=\left(x_{1 t}, \ldots, x_{k t}\right)^1\)
- \(S=x_p, x_{p+1}, \ldots, x_{p+n-1}\) : subsequence of length \(n \leq \mid T \mid\) of \(X\),
- \(X_t=\left(X_{1 t}, \ldots, X_{k t}\right)\).
(2) Outlier Type
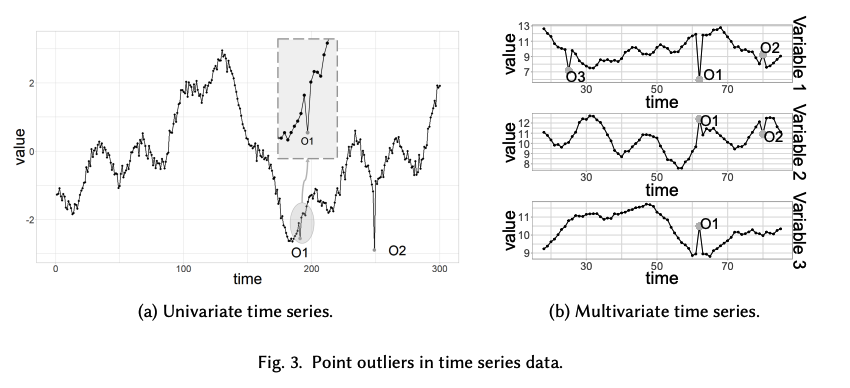
a) Point outliers
- Two types
- Global outlier: vs. other values in the TS
- Local outlier vs. its neighboring points
-
Can be univariate or multivariate
- example) Fig 3a
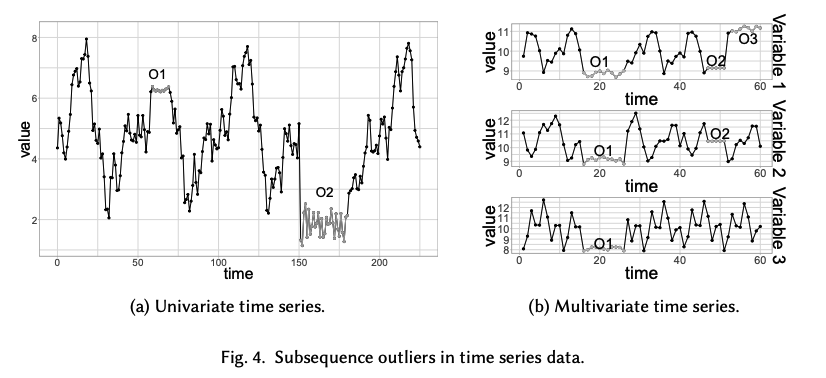
b) Subsequence outliers
- Consecutive points in TS
- Joint behavior is unusual
- Each observation individually is not necessarily a point outlier!
- Global & Local
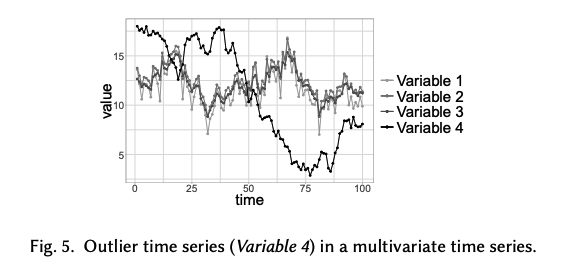
c) Outlier TS
- Entire TS can also be outliers
- Can be only found in MTS
Summary
-
(1) Closely related to the input data type
-
(2) Outlier TS can only be found in MTS
-
(3) Outliers depend on the context
-
ex) If the detection method uses the entire TS as contextual information
\(\rightarrow\) then the detected outliers are global.
-
ex) If the method only uses a segment of the series (a time window)
\(\rightarrow\) then the detected outliers are local
( because they are outliers within their neighborhood )
-
-
Global outliers are also local, but not all local outliers are global. (e.g., O1 in Fig. 3a).
(3) Nature of the method
“Univariate” detection method
- Only considers a “single” time-dependent variable
“Multivariate” detection method
- Able to simultaneously work with “multiple” time-dependent variable.
Data & Method
- Detection method can be univariate, even if the input data is multivariate
- Individual analysis can be performed on EACH time-dependent variable
- Multivariate technique cannot be used if the input data is univariate
3. Point Outliers
Both in UTS & MTS
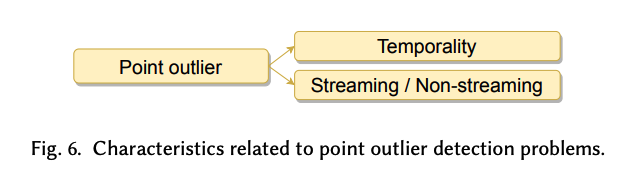
2 key characteristics
- (1) Temporality
- Inherent temporal order of the observations
- (O) produce the DIFFERENT results if they are applied to a shuffled version of TS
- (X) produce the SAME results if they are applied to a shuffled version of TS
- Inherent temporal order of the observations
- (2) Streaming & Non-streaming
- Ability to detect outliers in streaming TS ( = without having to wait for more data )
(1) UTS
Detect point outliers in a UTS
- Single time-dependent variable
- Outliers = univariate points
- Only UNIVARIATE detection techniques can be used
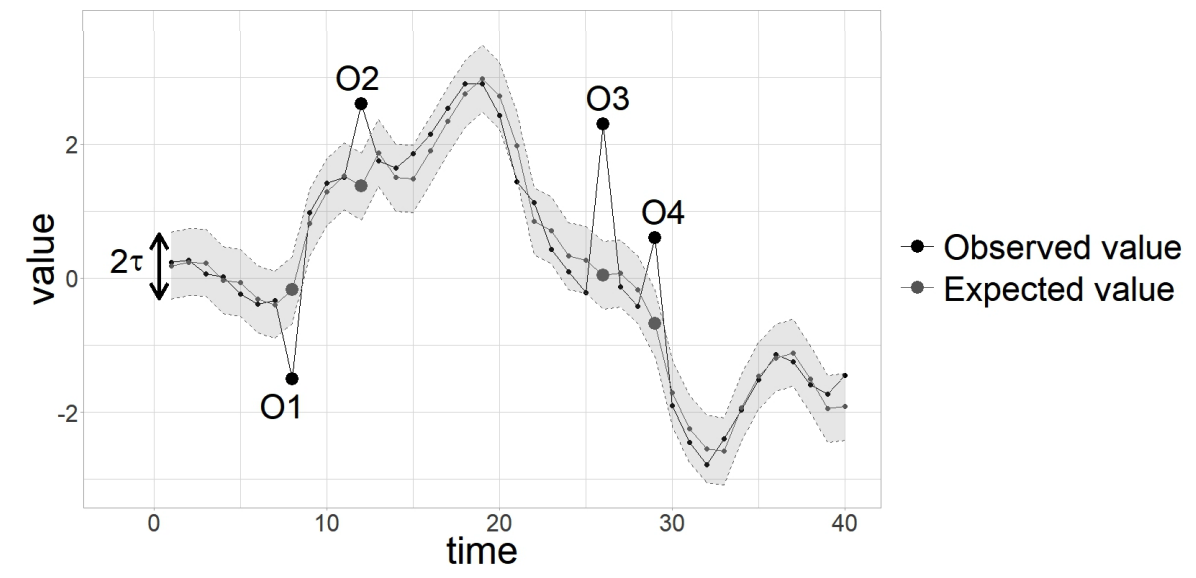
Point Outlier = point that significantly deviates from its expectve value
\(\mid x_t-\hat{x}_t \mid >\tau\).
- \(x_t\) : Observed
- \(\hat{x}_t\) : Expected
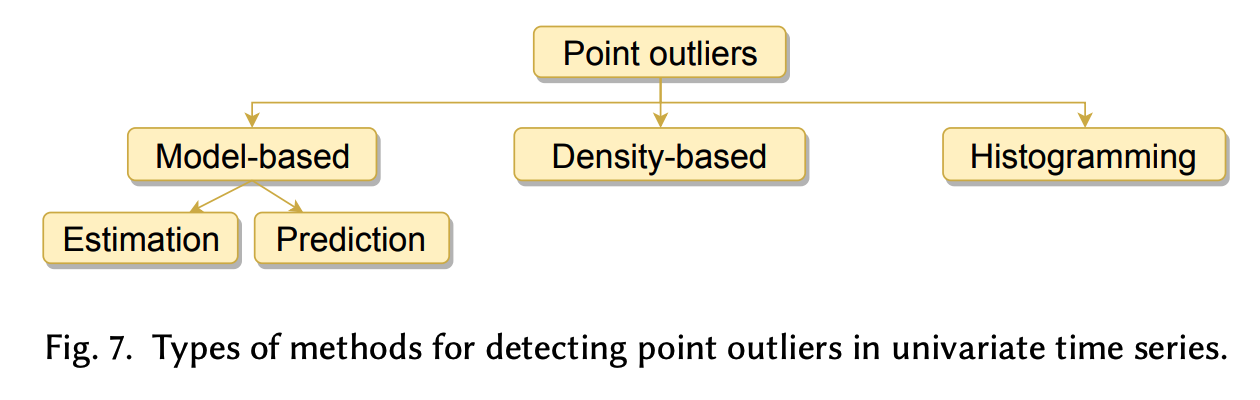
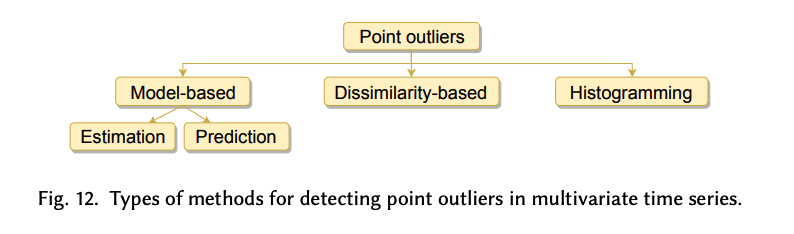
1-a) Model-based methods
- \(\mid x_t-\hat{x}_t \mid >\tau\).
- Most common approaches
- Each technique computes \(\hat{x}_t\) and \(\tau\) differently
- Ex) Based on fitting a model (either explicitly or implicitly).

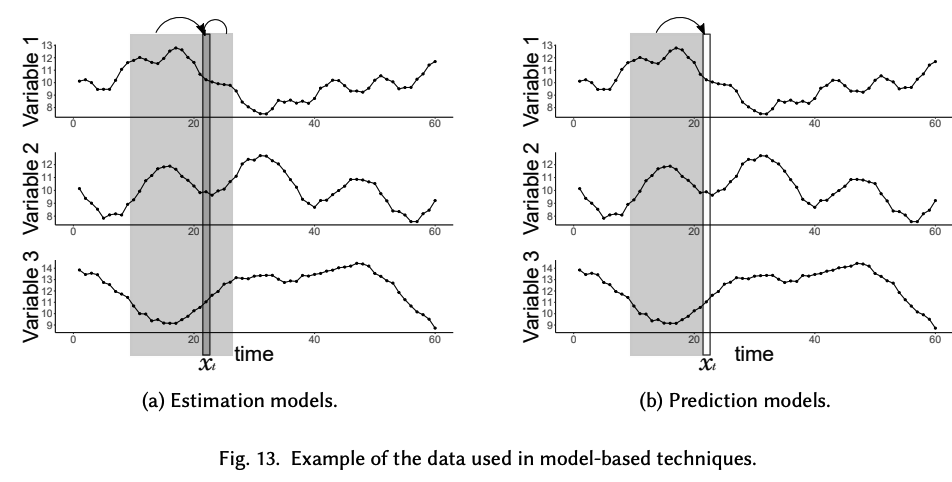
(1) Estimation based
- \(\hat{x}_t\) is obtained using “previous and subsequent observations” to \(x_t\) (past, current, and future data)
(2) Prediction based
- \(\hat{x}_t\) is obtained relying only on “previous observations” to \(x_t\) (past data)
Main difference?
- (1) Prediction based: Can be used in streaming TS
- (2) Estimation based: Can only be done if, in addition to some points preceding / current point \(x_t\) is used to compute
Example) Estimation based
Ex 1) Constant or piecewise constant models
- Use basic statistics ( ex. median, Median Absolute Deviation (MAD) ) to obtain \(\hat{x_t}\)
- Calculated using the full TS or by grouping the TS in equal-length segments
- CANNOT be applied in streaming ( when future data is needed )
Ex 2) Unequal-length segments
- Obtained with a segmentation technique
- ex) use the mean of each segment to determine the expected value
- ex) adaptive threshold \(\tau_i=\alpha \sigma_i\)
- \(\alpha\) : fixed value
- \(\sigma_i\) : std of segment \(i\)
- \(\alpha\) is a fixed value and \(\sigma_i\) the standard deviation of segment \(i\).
Ex 3)
- identify data points that are unlikely if a certain fitted model or distribution is assumed to have generated the data
- ex) model the structure of the data
- smoothing methods ( B-splines, kernels, Exponentially Weighted Moving Average (EWMA) )
- slope constraints
- assume that the data are approximately normal
- Gaussian Mixture Models (GMM).
- Once a model or distribution is assumed, use equation (1) directly to decid
Example) Prediction based
-
fit a model to the TS & obtain \(\hat{x_t}\) using only PAST data
-
deal with streaming TS
(A) Do not adapt to change
( = use a fixed model & not able to adapt to the changes that occur over time )
-
ex) DeepAnT
- deep learning-based outlier detection approach (CNN)
-
ex) Autoregressive model / ARIMA model
- obtain confidence intervals for the predictions instead of only point estimates.
\(\rightarrow\) implicitly define \(\tau\)
(B) Adapt to change
( = by retraining the model )
- ex) predicts the value \(\hat{x_t}\) with the median of its past data
- ex) fit an ARIMA model within a sliding window
- to compute the prediction interval
- parameters are refitted each time that the window moves
Extreme Value Theory ( EVT )
- prediction-based approach
- streaming UTS
- using past data and retraining.
Details of EVT
-
given a fixed risk \(q\), allows us to obtain a threshold value \(z_{q, t}\) that adapts itself to the evolution of the data
- such that \(P\left(X_t>z_{q, t}\right)<q\), for any \(t \geq 0\),
- assuming that the extreme values follow a Generalized Pareto Distribution (GPD).
-
Data is used to both..
- (1) detect anomalies \(\left(X_t>z_{q, t}\right)\)
- (2) refine \(z_{q, t}\).
-
example)
- SPOT : for data following any stationary distribution
- DSPOT : for data that can be subject to concept drift
-
retrain the underlying model periodically ( or each time a new point arrives )
\(\rightarrow\) can adapt to the evolution of TS
All of these techniques are based on \(\mid x_t-\hat{x}_t \mid >\tau\)
-
but not all the existing point outlier detection methods rely on that idea
-
ex) density-based methods ( \(\leftrightarrow\) model-based methods )
-
consider that points with less than \(\tau\) neighbors are outliers
( \(x_t\) is an outlier \(\Longleftrightarrow \mid \left\{x \in X \mid d\left(x, x_t\right) \leq R\right\} \mid <\tau\))
-
-
1-b) Density-based methods
\(x_t \text { is an outlier } \Longleftrightarrow \mid \left\{x \in X \mid d\left(x, x_t\right) \leq R\right\} \mid <\tau\).
- \(d\) : (commonly) Euclidean distance
- \(x_t\) : data point at \(t\) step to be analyzed
Point is an outlier if \(\tau_p+\tau_s<\tau\),
- \(\tau_p\) and \(\tau_s\) are the number of preceding and succeeding neighbors at distance lower or equal than \(R\)
Widely handled in non-temporal data
- concept of neighborhood is more complex in TS due to the order
- ex) apply this method within a sliding window
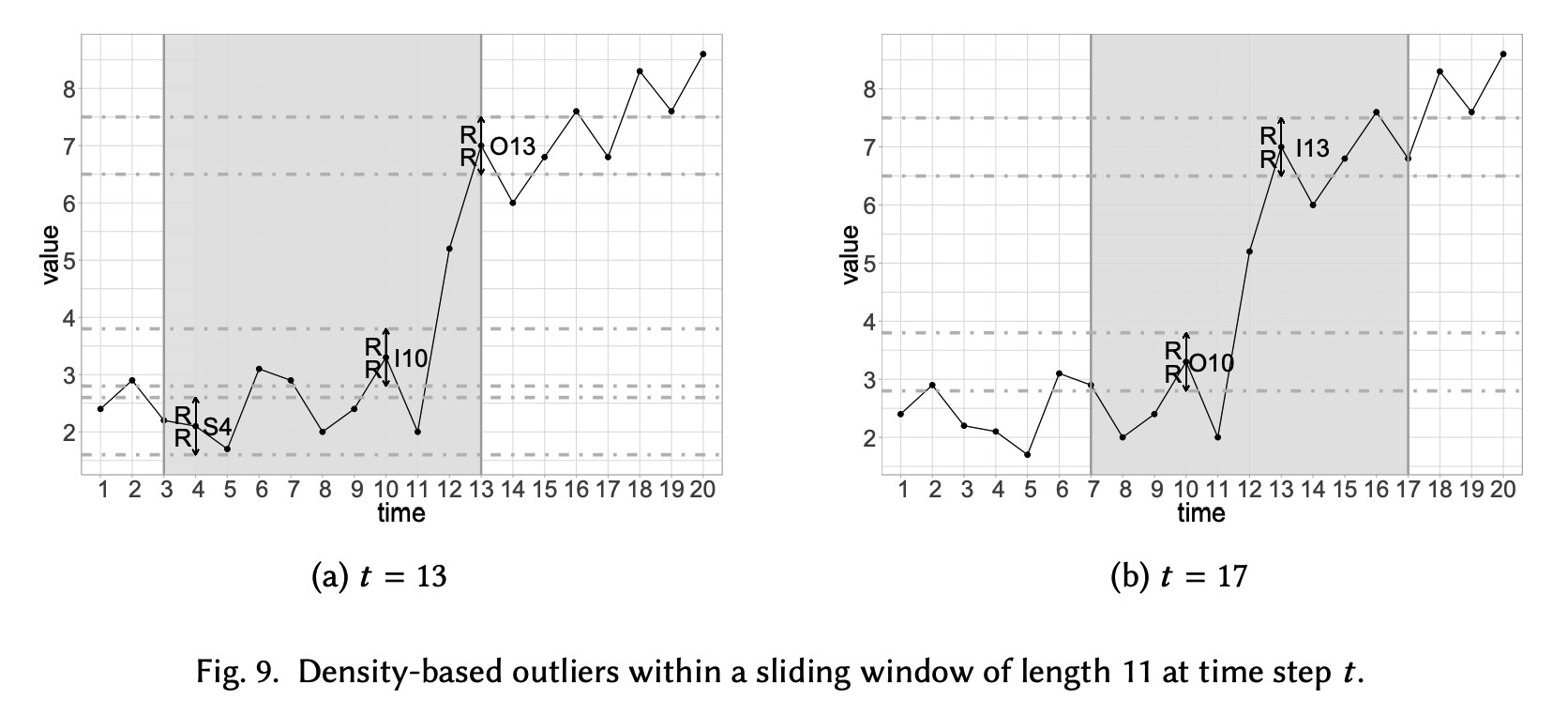
Two different time steps with \(R=0.5\), \(\tau=3\), and a sliding window of length 11.
- outlier for a window (e.g., O13 at \(t=13\) )
-
NOT outlier for window (e.g., I13 at \(t=17\) )
-
if a data point has at least \(\tau\) succeeding neighbors within a window…
\(\rightarrow\) cannot be an outlier for any future evolution (e.g., S4 at \(t=13\) ).
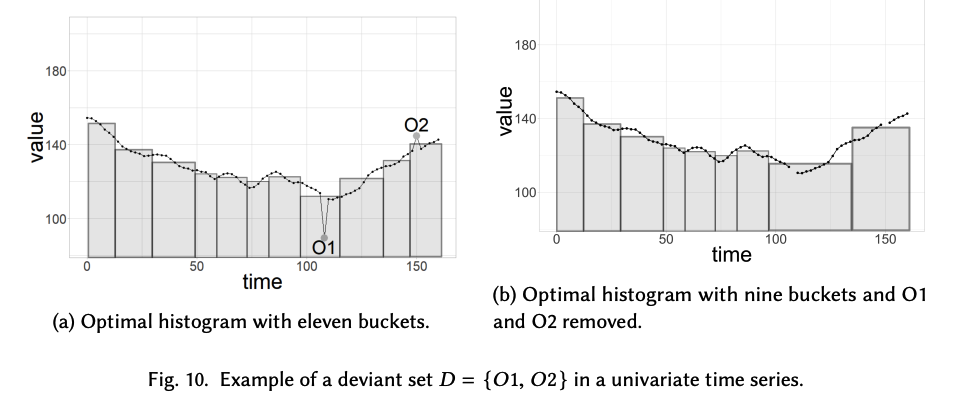
1-c) Histogramming
Detecting the points whose removal from the UTS results in a histogram representation with lower error than the original
(2) MTS
Can deal
- not only with a single variable ( 3.2.1 )
- but also with multiple variables ( 3.2.2 )
Point outlier in a MTS
\(\rightarrow\) can affect both univariate / multivariate point
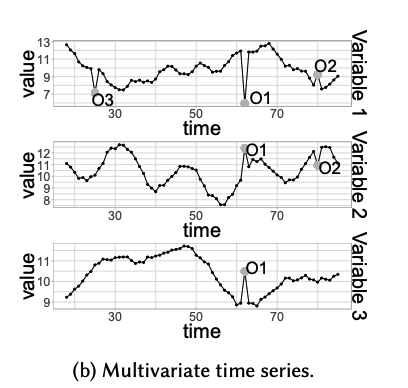
Some multivariate techniques
\(\rightarrow\) able to detect univariate point outliers
Some univariate techniques
\(\rightarrow\) able to detect multivariate point outliers
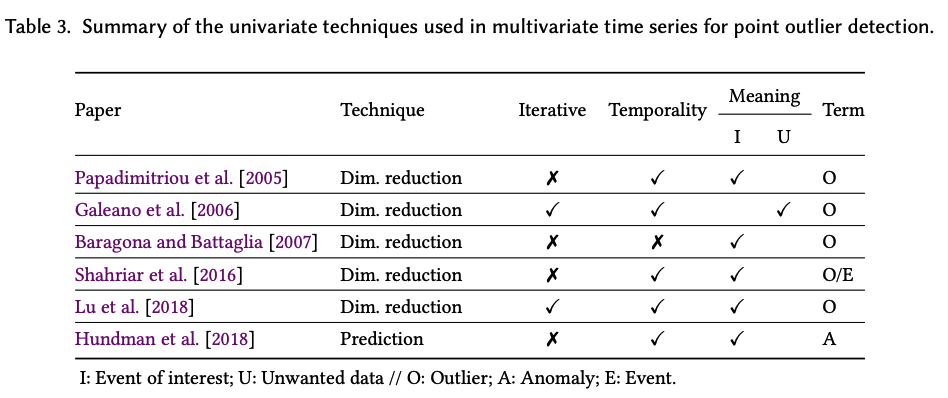
2-a) Univariate techniques.
Univariate analysis can be performed for each variable in MTS
( w/o considering dependencies that may exist between the variables )
ex) Hundman et al. [2018] : LSTM
- predict spacecraft telemetry and find point outliers within each variable in MTS
- present a dynamic thresholding approach
- some smoothed residuals of the model obtained from past data are used to determine the threshold at each time step.
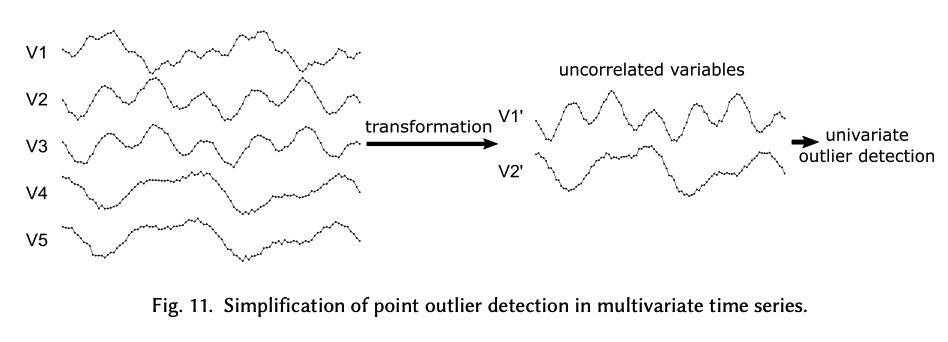
ex 2) Dimension Reduction
UTS analysis ignore correlation between TS
\(\rightarrow\) some researchers apply a preprocessing method to the MTS to find a new set of uncorrelated variables where univariate techniques can be applied.
- based on dimensionality reduction techniques,
- ex) incremental PCA ( Papadimitriou et al. [2005] )
- linear combinations of the initial variables
- to determine the new independent variables
- posterior univariate point outlier detection technique that is applied is based on the AR model
- ex) Reducing the dimensionality with projection pursuit ( Galeano et al. [2006] )
- aims to find the best projections to identify outliers.
- prove that the optimal directions = those that maximize or minimize the kurtosis coefficient of the projected TS
- Univariate statistical tests [Chen and Liu 1993; Fox 1972] are then applied iteratively to each projected TS
- ex) ICA ( Baragona and Battaglia [2007] )
- to obtain a set of unobservable independent nonGaussian variables
- assumtion : observed data has been generated by a linear combination of those variables
- to obtain a set of unobservable independent nonGaussian variables
ex 3) Dimension Reduction 2
-
reduce the input MTS into a single time-dependent variable
( rather than into a set of uncorrelated variables )
-
ex) Lu et al. [2018]
-
define the transformed UTS using the cross-correlation function between adjacent vectors in time
-
point outliers are iteratively identified in this new TS
( = those that have a low correlation with their adjacent multivariate points )
-
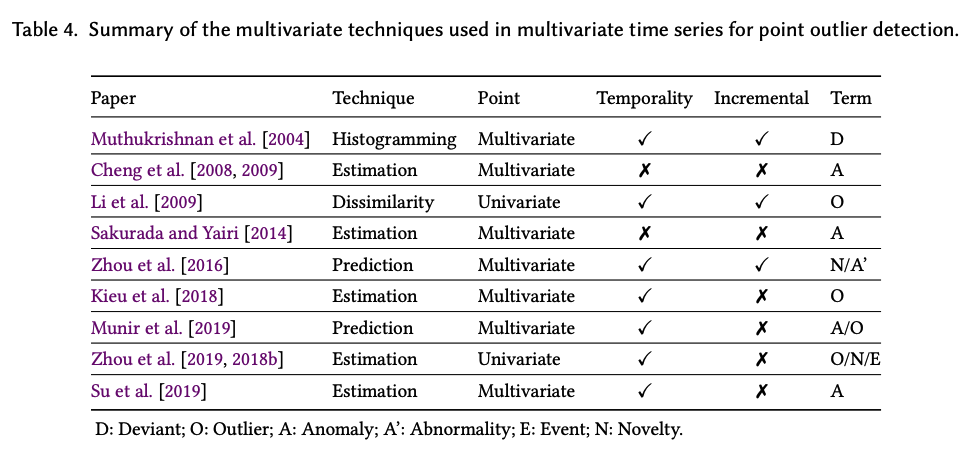
2-b) Multivariate techniques
Deal simultaneously with multiple time-dependent variables ( w.o transformation )
For a predefined threshold \(\tau\), outliers are identified if
- \(\mid \mid \boldsymbol{x}_t-\hat{\boldsymbol{x}}_t \mid \mid >\tau\).
- \(\boldsymbol{x}_t\) : actual \(k\)-dimensional data point
- \(\hat{\boldsymbol{x}}_t\) : expected value
- \(\hat{\boldsymbol{x}}_{\boldsymbol{t}}\) can be obtained using …
- (1) estimation models
- (2) prediction models
Estimation model-based
Autoencoder (AE)
-
outliers = non-representative features
\(\rightarrow\) AE fails to reconstruct them
-
ex) Sakurada and Yairi [2014]
- Input = single MTS point
- Temporal correlation between the observations within each variable is not considered
-
ex) Kieu et al. [2018]
-
propose extracting features within overlapping sliding windows before applying AE
(e.g., statistical features or the difference between the Euclidean norms of two consecutive time windows)
-
-
ex) Su et al. [2019]
- based on VAE & GRU
- Input = sequence of observations containing \(\boldsymbol{x}_t\) and \(l\) preceding observations
- Output = reconstructed \(\boldsymbol{x}_t\left(=\hat{\boldsymbol{x}}_t\right)\).
- Apply extreme value theory in the reference of normality to automatically select the threshold value.
General trend estimation of multiple co-evolving time series
-
ex) Zhou et al. [2019, 2018b]
-
non-parametric model that considers both
- (1) temporal correlation between the values within each variable
- (2) inter-series relatedness
to estimate that trend.
-
Trend of each variable = estimated using MTS
-
UTS point outliers = identified within each variable
( instead of \(k\)-dim points )
-
Prediction model-based
- Fit a model to a MTS
- ex) Contextual Hidden Markov Model (CHMM)
- incrementally captures both
- (1) temporal dependencies :
- modeled by a basic HMM
- (2) correlations between the variables in a MTS :
- included into the model by adding an extra layer to the HMM network
- (1) temporal dependencies :
- incrementally captures both
- ex) DeepAnt algorithm [Munir et al. 2019]
- capable of detecting point outliers in MTS using the CNN
- next timestamp is predicted using a window of previous observations
Dissimilarity-based methods
Based on computing the pairwise dissimilarity between MTS points
( w.o fitting the model )
For a predefined threshold \(\tau, \boldsymbol{x}_{\boldsymbol{t}}\) is a point outlier if:
- \(s\left(\boldsymbol{x}_{\boldsymbol{t}}, \hat{\boldsymbol{x}}_{\boldsymbol{t}}\right)>\tau\).
Do not usually use the raw data directly,
( instead use different representation methods )
- ex) Cheng et al. [2008, 2009]
- represent the data using a graph
- nodes = points in MTS
- edges = similarity between them ( = computed with the RBF )
- apply a random walk model in the graph
- outlier = hardly accessible in the graph)
- represent the data using a graph
- ex) Li et al. [2009]
- propose recording the historical similarity and dissimilarity values between the variables in a vector.
- analyze the dissimilarity of consecutive points over time
Histogramming approach
pass
Summary
4. Subsequence Outliers
Goal : identify a set of consecutive points that jointly behave unusually
Key aspects
(1) Fixed-length ( \(\leftrightarrow\) variable length ) subsequences
- need the user to predefine the length
- ( commonly ) obtain the subsequences using a sliding window over TS
(2) Representation
- comparison between subsequences is challenging
- rather than raw value, use representations
- ex) Discretization
- equal-frequency binning, equal-width binning
- ex) Dictionaries
- directly to obtain representations based on dictionaries
- ex) Discretization
(3) Periodicity
Periodic subsequence outliers
- are unusual subsequences that repeat over time
- Unlike point outliers where periodicity is not relevant, periodic subsequence outliers are important in areas such as fraud detection
Subsequences consider the temporality by default!
When analyzing subsequence outliers in a streaming context… 3 cases
- (1) a single data point arrives
- answer must be given for a subsequence containing this new point
- (2) a subsequence arrives
- needs to be marked as an outlier or non-outlier
- (3) a batch of data arrives and subsequence outliers need to be found within it
Most of the models are fixed & do not adapt to changes in the streaming sequence
\(\rightarrow\) focus on the incremental techniques!
( = more suitable for processing streaming TS )
(1) UTS

1-a) Discord detection
Comparing each subsequence with the others
\(D\) is a discord of time series \(X\) if
- \(\forall S \in A, \min _{D^{\prime} \in A, D \cap D^{\prime}=\emptyset}\left(d\left(D, D^{\prime}\right)\right)>\min _{S^{\prime} \in A, S \cap S^{\prime}=\emptyset}\left(d\left(S, S^{\prime}\right)\right)\).
- \(A\) : set of all subsequences of \(X\) extracted by a sliding window
- \(D^{\prime}\) : subsequence in \(A\) that does not overlap with \(D\)
- \(S^{\prime}\) in \(A\) does not overlap with \(S\)
- \(d\) : Euclidean distance
Discord discovery techniques require the user to specify the length of the discord.
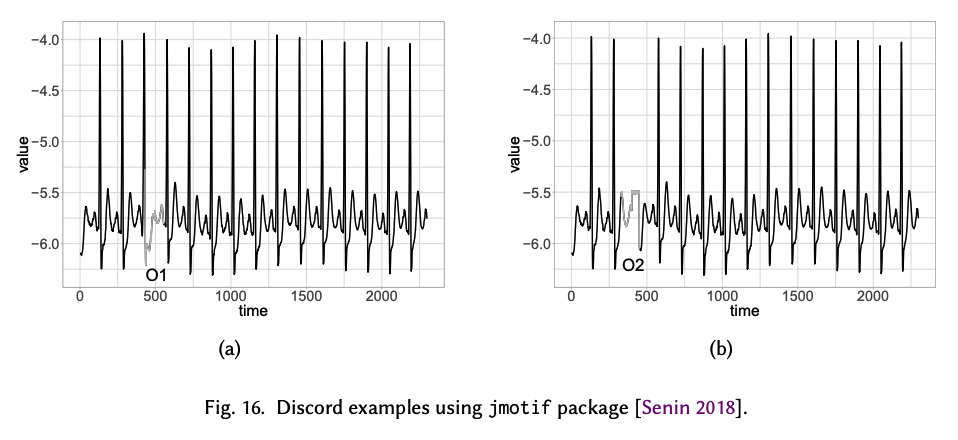
Simplest Way : Brute-force
- requires a quadratic pairwise comparison
- speed up by HOT-SAX algorithm
Limited to finding the most unusual subsequence within a TS
Problem : do not have a reference of normality or a threshold
- cannot specify whether it is indeed an outlier or not
\(\rightarrow\) Decision must be made by the user.
1-b) Dissimilarity-based methods
based on the direct comparison of subsequences, using a reference of normality
\(\rightarrow\) reference of normality vary widely
( in contrast to the dissimilarity-based techniques analyzed MTS + point outliers )
For a predefined threshold \(\tau\) , subsequence outliers are those that are dissimilar to normal subsequences
-
\(s(S, \hat{S})>\tau\).
-
\(S\) : the subsequence being analyzed
-
\(\hat{S}\) : expected value of \(S\)
( = obtained based on the reference of normality )
-
-
Typically, \(S\) is of fixed-length, non-periodic, and extracted via a sliding window
How to obtain \(\hat{S}\) ?
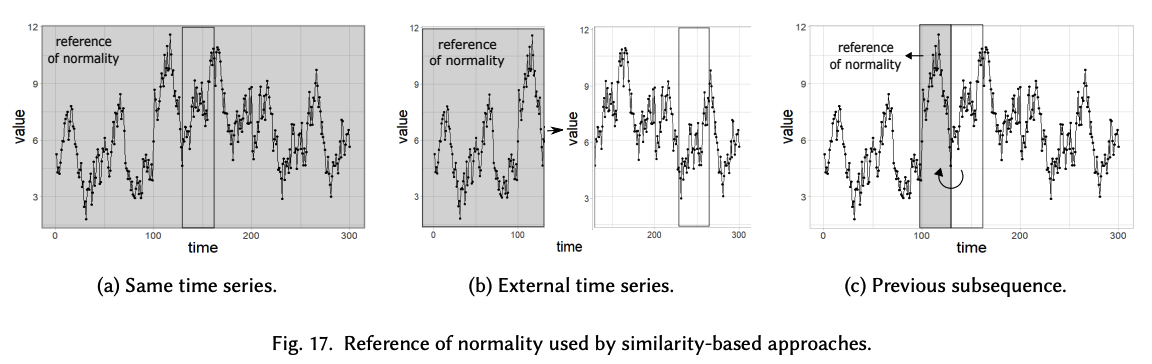
(A) same TS
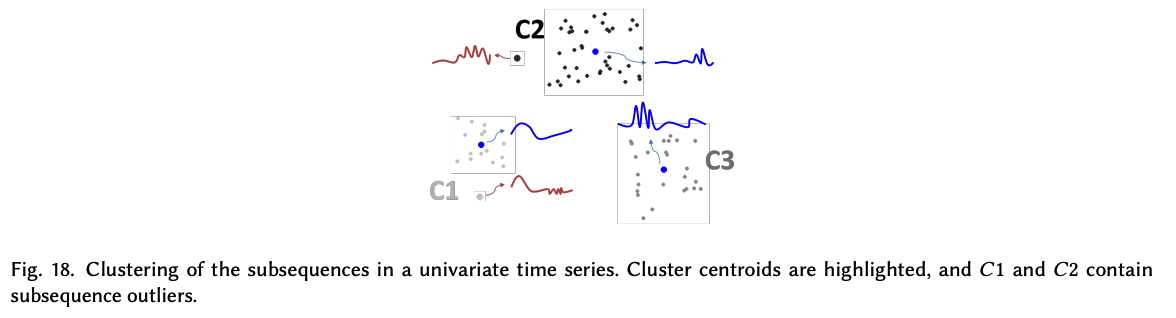
Clustering techniques
-
commonly use this reference of normality to create clusters
-
\(s(S, \hat{S})>\tau\). can be defined by the centroid of the cluster
(B) external TS
Rely on an external TS as a reference of normality
\(\rightarrow\) assuming that it has been generated by the same underlying process but with no outliers.
(C) previous subsequence
only use the previous adjacent non-overlapping window to the subsequence being analyzed as the reference of normality,
\(\rightarrow\) have a much more local perspective than the others
1-c) Prediction-based methods
Assume that normality is reflected by a time series composed of past subsequences.
- \(\sum_{i=p}^{p+n-1} \mid x_i-\hat{x}_i \mid>\tau\).
- \(S=x_p, \ldots, x_{p+n-1}\) : subsequence being analyzed
- \(\hat{S}\) : its predicted value
Predictions can be made in 2 different manners:
- (1) point-wise
- make predictions for as many points as the length of the subsequence iteratively
- errors accumulate
- (2) subsequence-wise
- calculates predictions for whole subsequences at once (not iteratively)
- ex) use CNN
1-d) Frequency-based methods
A subsequence \(S\) is an outlier if it does not appear as frequently as expected:
- \(\mid f(S)-\hat{f}(S)\mid >\tau\).
- \(f(S)\) : frequency of occurrence of \(S\)
- \(\hat{f}(S)\) : its expected frequency
Due to the difficulty of finding two exact real-valued subsequences in a TS when counting the frequencies
\(\rightarrow\) work with a discretized time series.
1-e) Information-based methods
A paradigmatic example can be found in Keogh et al. [2002]. Given an external univariate time series as reference, a subsequence extracted via a sliding window in a new univariate time series is an outlier relative to that reference if the frequency of its occurrence in the new series is very different to that expected. Rasheed and Alhajj [2014] also
https://arxiv.org/pdf/2002.04236.pdf