
ContiFormer: Continuous-Time Transformer for Irregular Time Series Modeling
Contents
- Abstract
- Preliminaries
- Methodology
- Overview
- Embedding Layer
- Mamba Pre-processing Layer
- MambaFormer Layer
- Forecasting Layer
- Experiments
0. Abstract
Continuous-time dynamics on Irregular TS (ITS)
- critical to account for (1) data evolution and (2) correlations that occur continuously
Previous works
-
a) RNN, Transformer models: discrete
\(\rightarrow\) Limitations in generalizing to continuous-time data paradigms.
-
b) Neural ODEs
- Promising results in dealing with ITS
- Fail to capture the intricate correlations within these sequences
ContiFormer
- Extends the relation modeling of Transformer to the continuous-time domain
- Explicitly incorporates the modeling abilities of continuous dynamics of Neural ODEs with the attention mechanism of Transformers.
1. Introduction
Paragraph 1) Characteristics of ITS
- (1) Irregularly generated or non-uniformly sampled observations with variable time intervals
- (2) Still, the underlying data-generating process is assumed to be continuous
- (3) Relationships among the observations can be intricate and continuously evolving.
Paragraph 2) Challenges for moddel design
- Divide into equally sized intervals??
\(\rightarrow\) Weverely damage the continuity of the data
- Recent works)
- Underlying continuous-time process is appreciated for ITS modeling
- Argue that the correlation within the observed data is also constantly changing over time
Paragraph 3) Two main branches
- (1) Neural ODEs & SSMs
- Pros) Promising abilities for capturing the dynamic change of the system over time
- Cons) Overlook the intricate relationship between observations
- (2) RNN & Transformers
- Pros) Capitalizes on the powerful inductive bias of NN
- Cons) Fixed-time encoding or learning upon certain kernel functions … fails to capture the complicated input-dependent dynamic systems
Paragraph 4) ContiFormer (Continuous-Time Transformer)
-
ContiFormer = (a) + (b)
- (a) Continuous dynamics of Neural ODEs
- (b) Attention mechanism of Transformers
\(\rightarrow\) Breaks the discrete nature of Transformer models.
-
Process
- Step 1) Defining latent trajectories for each observation in the given irregularly sampled data points
- Step 2) Extends the “discrete” dot-product in Transformers to a “continuous”-time domain
- Attention: calculated between continuous dynamics.
Contribution
a) Continuous-Time Transformer
- First to incorporate a continuous-time mechanism into attention calculation in Transformer,
b) Parallelism Modeling
- Propose a novel reparameterization method, allowing us to parallelly execute the continuous-time attention in the different time ranges
c) Theoretical Analysis
- Mathematically characterize that various Transformer variants can be viewed as special instances of ContiFormer
d) Experiment Results
- TS interpolation, classification, and prediction
2. Method
Irregular TS
- \(\Gamma=\left[\left(X_1, t_1\right), \ldots,\left(X_N, t_N\right)\right]\),
- Observations may occur at any time
- Observation time points \(\boldsymbol{\omega}=\left(t_1, \ldots, t_N\right)\) are with irregular intervals
- \(X=\left[X_1 ; X_2 ; \ldots, X_N\right] \in \mathbb{R}^{N \times d}\).
Input)
- (1) Irregular time series \(X\)
- (2) Sampled time \(\boldsymbol{\omega}\)
- Sequence of (reference) time points
- \(t\) : random variable representing a query time point
Output)
-
Latent continuous trajectory
( = captures the dynamic change of the underlying system )
Summary
- Transforms the discrete observation sequence into the continuous-time domain
- Attention module ( = Continuous perspective )
- Expands the dot-product operation in vanilla Transformer to the continuous-time domain
- (1) Models the underlying continuous dynamics
- (2) Captures the evolving input-dependent process
- Expands the dot-product operation in vanilla Transformer to the continuous-time domain
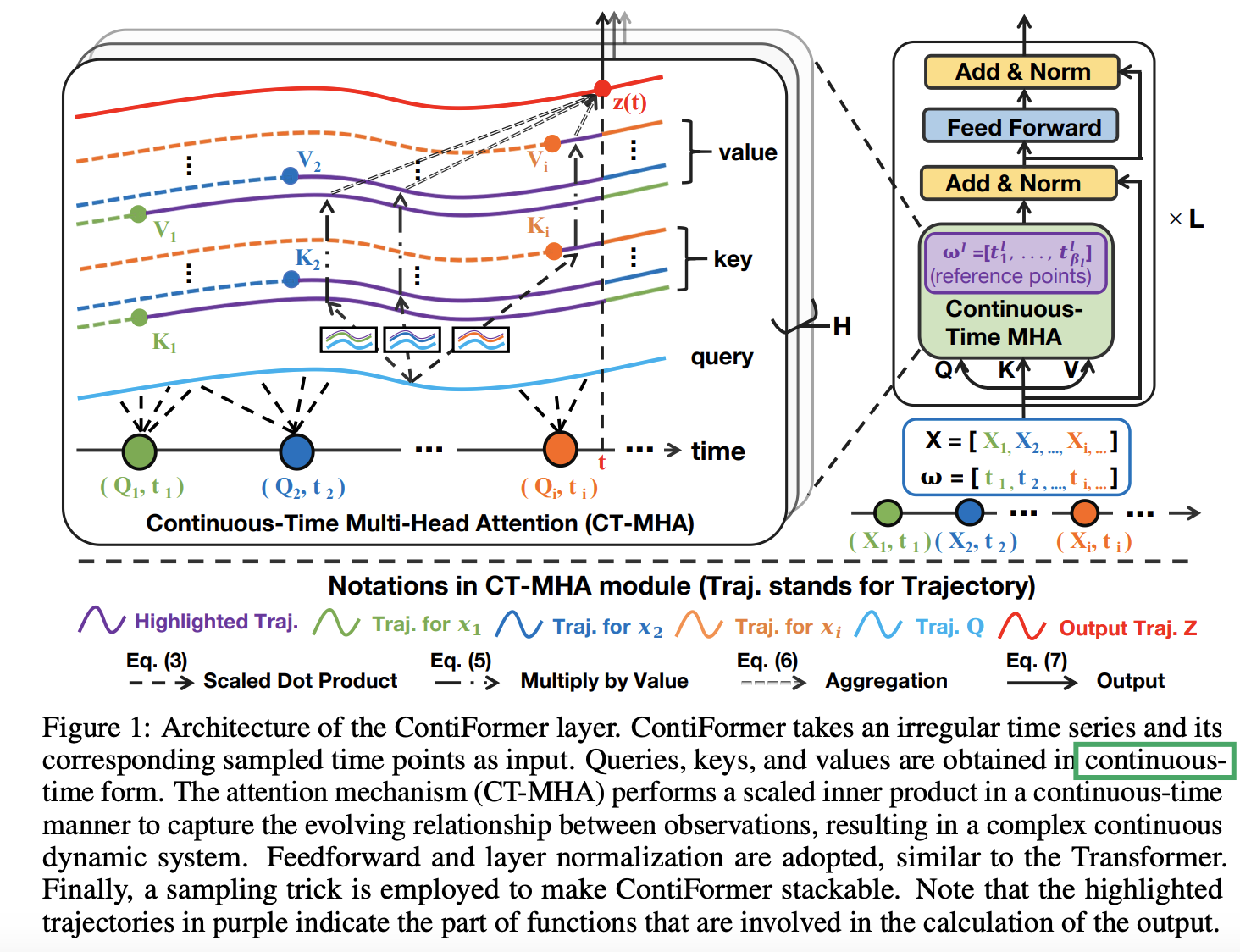
(1) Continuous-Time Attention Mechanism
Core of the ContiFormer layer
- continuous-time multi-head attention (CT-MHA)
- Transform \(X\) into…
- \(Q=\left[Q_1 ; Q_2 ; \ldots ; Q_N\right]\),
- \(K=\left[K_1 ; K_2 ; \ldots ; K_N\right]\),
- \(V=\left[V_1 ; V_2 ; \ldots ; V_N\right]\).
- Utilize ODE to define the latent trajectories for each observation.
- Latent space: assume that the underlying dynamics evolve following linear ODEs
- Construct a continuous query function
- by approximating the underlying sample process of the input.
a) Continuous Dynamics from Observations
Attention in continuous form
Step 1) Empoy ODE to define the latent trajectories for each observation
- ex) first observation: at time point \(t_1\)
- ex) last observation: at time point \(t_N\)
Continuous keys and values:
- \(\mathbf{k}_i\left(t_i\right)=K_i\),
- \(\mathbf{k}_i(t)=\mathbf{k}_i\left(t_i\right)+\int_{t_i}^t f\left(\tau, \mathbf{k}_i(\tau) ; \theta_k\right) \mathrm{d} \tau\).
-
\[\mathbf{v}_i\left(t_i\right)=V_i\]
- \(\mathbf{v}_i(t)=\mathbf{v}_i\left(t_i\right)+\int_{t_i}^t f\left(\tau, \mathbf{v}_i(\tau) ; \theta_v\right) \mathrm{d} \tau\).
Notation:
- \(t \in\left[t_1, t_N\right], \mathbf{k}_i(\cdot), \mathbf{v}_i(\cdot) \in \mathbb{R}^d\):
- Represent the ODE for the \(i\)-th observation
- with parameters \(\theta_k\) and \(\theta_v\),
- with initial state of \(\mathbf{k}_i\left(t_i\right)\) and \(\mathbf{v}_i\left(t_i\right)\)
- Represent the ODE for the \(i\)-th observation
- \(f(\cdot) \in \mathbb{R}^{d+1} \rightarrow \mathbb{R}^d\):
- Controls the change of the dynamics
b) Query Function
To model a dynamic system, queries can be modeled as a function of time
- Represents the overall changes in the input
Adopt a common assumption that irregular time series is a “discretization” of an underlying continuous-time process
\(\rightarrow\) Define a closed-form continuous-time interpolation function (e.g., natural cubic spline) with knots at \(t_1, \ldots, t_N\) such that \(\mathbf{q}\left(t_i\right)=Q_i\) as an approximation of the underlying process.
c) Scaled Dot Product
Self-attention
-
Calculating the correlation between queries and keys
-
By inner product ( \(Q \cdot K^{\top}\) )
Extending the **discrete ** inner-product to its **continuous-time ** domain!!
- Two real functions: \(f(x)\) and \(g(x)\)
- Inner product of two functions in a closed interval \([a, b]\) :
- \(\langle f, g\rangle=\int_a^b f(x) \cdot g(x) \mathrm{d} x\).
- Meaning = How much the two functions “align” with each other over the interval
\(\boldsymbol{\alpha}_i(t)=\frac{\int_{t_i}^t \mathbf{q}(\tau) \cdot \mathbf{k}_i(\tau)^{\top} \mathrm{d} \tau}{t-t_i}\).
Evolving relationship between the..
- (1) “\(i\)-th sample” (key)
- (2) “dynamic system” at time point \(t\) (query)
- in a closed interval \(\left[t_i, t\right]\),
\(\rightarrow\) To avoid numeric instability during training, we divide the integrated solution by the time difference
Discontinuity at \(\boldsymbol{\alpha}_i\left(t_i\right)\)…. How to solve?
Define \(\boldsymbol{\alpha}_i\left(t_i\right)\) as …
\(\boldsymbol{\alpha}_i\left(t_i\right)=\lim _{\epsilon \rightarrow 0} \frac{\int_{t_i}^{t_i+\epsilon} \mathbf{q}(\tau) \cdot \mathbf{k}_i(\tau)^{\top} \mathbf{d} \tau}{\epsilon}=\mathbf{q}\left(t_i\right) \cdot \mathbf{k}_i\left(t_i\right)^{\top}\).
d) Expected Values
Query time \(t \in\left[t_1, t_N\right]\),
Value of an observation at time point \(t\): expected value from \(t_i\) to \(t\)
= \(\widehat{\mathbf{v}}_i(t)=\mathbb{E}_{t \sim\left[t_i, t\right]}\left[\mathbf{v}_i(t)\right]=\frac{\int_{t_i}^t \mathbf{v}_i(\tau) \mathrm{d} \tau}{t-t_i}\)
e) Multi-Head Attention
Summary
-
Allows for the modeling of complex, time-varying relationships between keys, queries, and values
-
Allows for a more fine-grained analysis of data by modeling the input as a continuous function of time
Continuous-time attention ( given a query time \(t\) )
\(\begin{aligned} \operatorname{CT}-\operatorname{ATTN}(Q, K, V, \boldsymbol{\omega})(t) & =\sum_{i=1}^N \widehat{\boldsymbol{\alpha}}_i(t) \cdot \widehat{\mathbf{v}}_i(t) \\ \text { where } \widehat{\boldsymbol{\alpha}}_i(t) & =\frac{\exp \left(\boldsymbol{\alpha}_i(t) / \sqrt{d_k}\right)}{\sum_{j=1}^N \exp \left(\boldsymbol{\alpha}_j(t) / \sqrt{d_k}\right)} \end{aligned}\).
Simultaneous focus on different input aspects
Stabilizes training by reducing attention weight variance
Multi-head: \(\operatorname{CT}-\operatorname{MHA}(Q, K, V, \boldsymbol{\omega})(t)=\operatorname{Concat}\left(\operatorname{head}_{(1)}(t), \ldots, \operatorname{head}_{(\mathrm{H})}(t)\right) W^O\).
(2) Continuous-Time Transformer
\(\begin{aligned} & \tilde{\mathbf{z}}^l(t)=\mathrm{LN}\left(\operatorname{CT}-\operatorname{MHA}\left(X^l, X^l, X^l, \omega^l\right)(t)+\mathbf{x}^l(t)\right) \\ & \mathbf{z}^l(t)=\operatorname{LN}\left(\operatorname{FFN}\left(\tilde{\mathbf{z}}^l(t)\right)+\tilde{\mathbf{z}}^l(t)\right) \end{aligned}\).
a) Sampling Process
ContiFormer layer
- Output: Continuous function \(\mathbf{z}^l(t)\) w.r.t. time as the output
- Input: Discrete sequence \(X^l\)
How to incorporate \(\mathbf{z}^l(t)\) into NN?
\(\rightarrow\) Establish reference time points for the output of each layer
Reference time points
- Used to discretize the layer output
- Correspond to either
- Input time points (i.e., \(\boldsymbol{\omega}\) )
- Task-specific time points.
Assume that the reference points for the \(l\)-th layer is \(\boldsymbol{\omega}^l=\left[t_1^l, t_2^l, \ldots, t_{\beta_l}^l\right]\),
\(\rightarrow\) Input to the next layer \(X^{l+1}\) : sampled as \(\left\{\mathbf{z}^l\left(t_j^l\right) \mid j \in\left[1, \beta_l\right]\right\}\)