Retrieval-Augmented Diffusion Models for Time Series Forecasting
Contents
- Abstract
- Introduction
- Related Work
- Preliminary
- Method
- Experiments
0. Abstract
Factors limiting TS Diffusion
- (1) Insufficient TS datasets
- (2) Absence of guidance
RATD (Retrieval Augmented Time series Diffusion model )
Consists of 2 pars
- (1) Embedding-based retrieval process
- (2) Reference-guided diffusion model
(1) Embedding-based retrieval process
- Retrieves the TS that are most relevant to historical TS from the database as references.
(2) Reference-guided diffusion model
- Uses the references to guide the denoising process
1. Introduction
TS forecasting tasks = Conditional generation tasks
Conditional generative models: learn \(P\left(\boldsymbol{x}^P \mid \boldsymbol{x}^H\right)\)
- Current SOTA: Diffusion models
Limitation of TS Diffusion
-
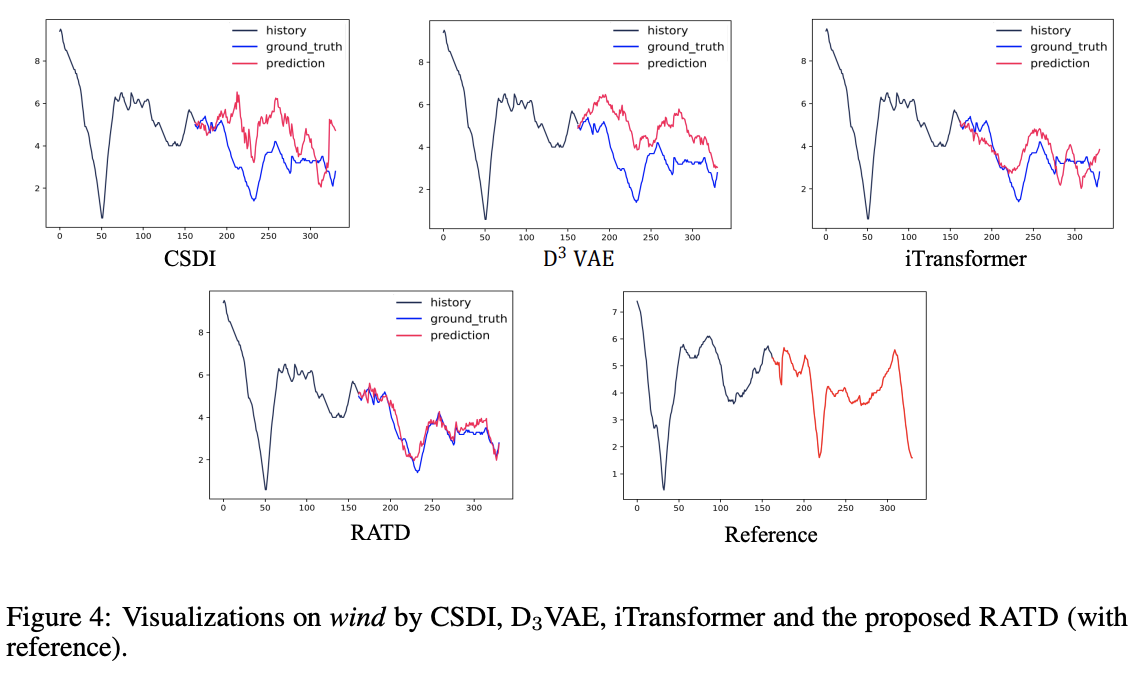
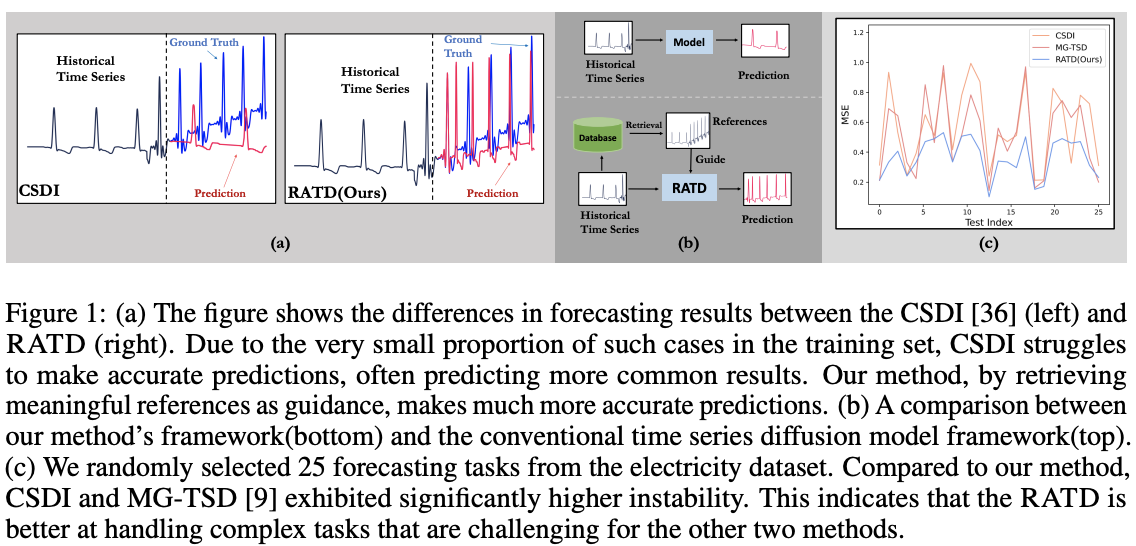
Remains unstable in certain scenarios ( Figure 1.c )
-
Why?
-
(1) Most TS lack direct semantic or label correspondences
\(\rightarrow\) Lack meaningful guidance during the generation (reverse)
-
(2) Two shortcomings of the TS datasets
- 2-1) Insufficient
- 2-2) Imbalanced
-
Propose RATD (Retrieval Augmented Time series Diffusion model )
Contributions
- (1) Propose Retrieval Augmented Time series Diffusion (RATD)
- Utilization of the dataset and providing meaningful guidance in the denoising process.
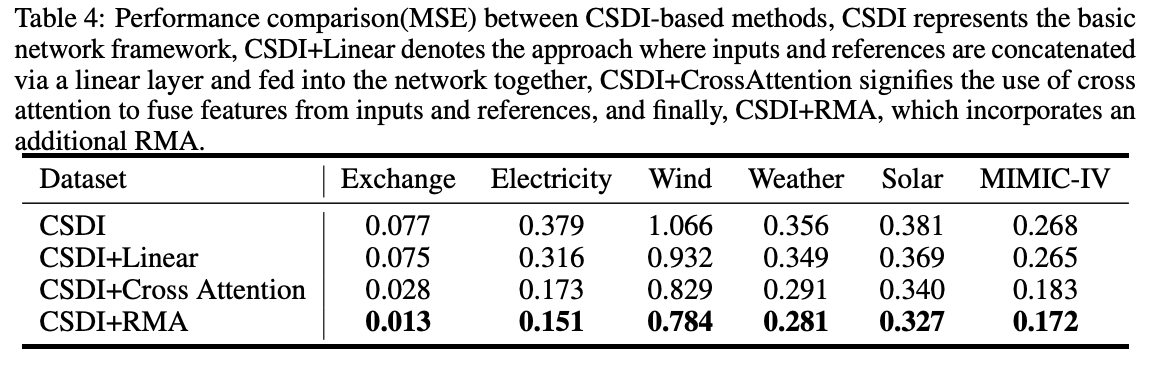
- (2) Propose Reference Modulated Attention (RMA) module
- To provide reasonable guidance from the reference
- w/o introducing excessive additional computational costs
- (3) Experiments on five real-world datasets
2. Related Work
(1) TS Diffusion
TimeGrad [28]
- Conditional diffusion model was first employed
- Autoregressive approach
- Denoising process guided by the hidden state
CSDI [36]
- Non-autoregressive generation strategy
SSSD [1]
- Replaced the noise-matching network with a SSSM
TimeDiff [30]
- Incorporated future mix-up and autoregressive initialization into a non-autoregressive framework
MG-TSD [9]
- Utilized a multi-scale generation strategy
- To sequentially predict the main components and details of the TS.
mr-diff [31]
- Utilized diffusion models to separately predict the trend and seasonal components of TS
\(\rightarrow\) Often perform poorly in challenging prediction tasks.
(2) RAG (Retrieval Augmented Generation)
RAG:
-
One of the classic mechanisms for generative models.
-
Incorporating explicit retrieval steps into NN
NLP & CV domain
[NLP] Leverage retrieval augmentation mechanisms to enhance the quality of language generation
[CV] Focus on utilizing samples from the database to generate more realistic images
TS domain
a) [3]
- Employed memorized similarity information from training data for retrieval
b) MQ-ReTCNN [40]
- Specifically designed for complex TS forecasting tasks involving multiple entities and variables.
c) ReTime [13]
- Creates a relation graph based on the temporal closeness between sequences
- Employs relational retrieval instead of content-based retrieval.
The proposed method still holds significant advantages compared to a)–c).
= References can repeatedly influence the generation
\(\rightarrow\) Allowing references to exert a stronger influence on the entire conditional generation process.
3. Preliminary
Notation
- ” \(s\) “ =Time step
- ” \(t\) “ = Step in the diffusion process.
Generative TS Forecasting
Notation
- Historical TS: \(\boldsymbol{x}^H=\) \(\left\{s_1, s_2, \cdots, s_l \mid s_i \in \mathbb{R}^d\right\}\),
- Target: \(\boldsymbol{x}^P = \left\{s_{l+1}, s_{l+2}, \cdots, s_{l+h} \mid s_{l+i} \in \mathbb{R}^{d^{\prime}}\right\}\left(d^{\prime} \leq d\right)\)
Learn a density \(p_\theta\left(\boldsymbol{x}^P \mid \boldsymbol{x}^H\right)\) that best approximates \(p\left(\boldsymbol{x}^P \mid \boldsymbol{x}^H\right)\),
- \(\min _{p_\theta} D\left(p_\theta\left(\boldsymbol{x}^P \mid \boldsymbol{x}^H\right) \mid \mid p\left(\boldsymbol{x}^P \mid \boldsymbol{x}^H\right)\right),\).
Full TS: \(\left\{s_1, s_2, \cdots, s_{n+h}\right\}=\left[\boldsymbol{x}^H, \boldsymbol{x}^P\right]\).
Conditional TS Diffusion Models
Forward process:
\(\begin{aligned} q\left(\boldsymbol{x}_t \mid \boldsymbol{x}_{t-1}\right) & :=\mathcal{N}\left(\boldsymbol{x}_t ; \sqrt{1-\beta_t} \boldsymbol{x}_{t-1}, \boldsymbol{x}^H, \beta_t \boldsymbol{I}\right) \\ q\left(\boldsymbol{x}_t \mid \boldsymbol{x}_0\right) & :=\mathcal{N}\left(\boldsymbol{x}_t ; \sqrt{\bar{\alpha}_t} \boldsymbol{x}_0, \boldsymbol{x}^H,\left(1-\bar{\alpha}_t\right) \boldsymbol{I}\right) \end{aligned}\).
Reverse process:
\(p_\theta\left(\boldsymbol{x}_{t-1} \mid \boldsymbol{x}_t, \boldsymbol{x}^H\right):=\mathcal{N}\left(\boldsymbol{x}_{t-1} ; \mu_\theta\left(\boldsymbol{x}_t\right), \Sigma_\theta\left(\boldsymbol{x}_t\right), \boldsymbol{x}^H\right)\).
Loss function:
\(\mathcal{L}\left(\boldsymbol{x}_0\right)=\sum_{t=1}^T \underset{q\left(\boldsymbol{x}_t \mid \mid \boldsymbol{x}_0 \mid \mid \boldsymbol{x}^H\right)}{\mathbb{E}} \mid \mid \mu_\theta\left(\boldsymbol{x}_t, t \mid \boldsymbol{x}^H\right)-\hat{\mu}\left(\boldsymbol{x}_t, \boldsymbol{x}_0 \mid \boldsymbol{x}^H\right) \mid \mid ^2\).
4. Method
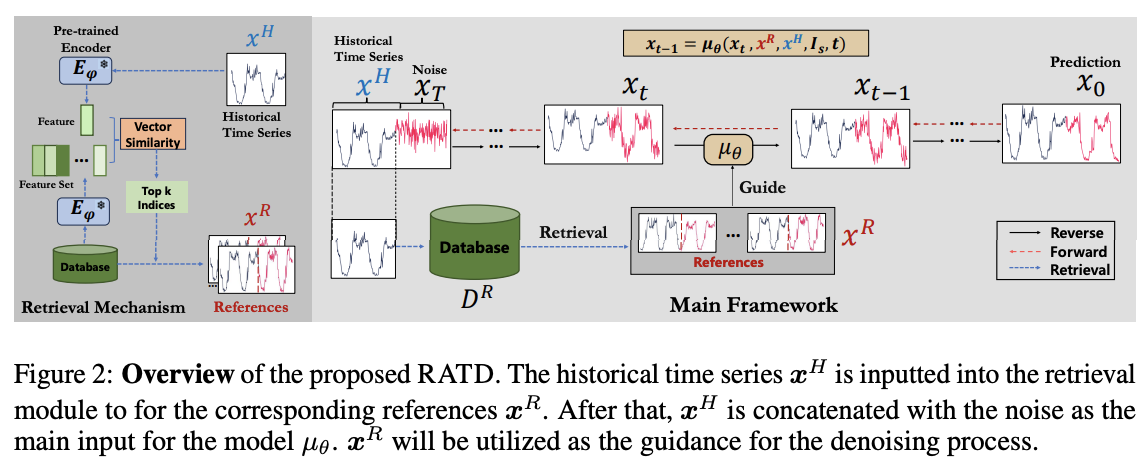
(1) Overview
(2) Constructing Retrievl DB for TS
Strategy for constructing DB
Use two different definitions of DB
Definition (1) Entire training set
- \(\mathcal{D}^{\mathcal{R}}:=\left\{\boldsymbol{x}_i \mid \forall \boldsymbol{x}_i \in \mathcal{D}^{\text {train }}\right\}\).
- where \(\boldsymbol{x}_i=\left\{s_i, \cdots, s_{i+l+h}\right\}\)
Definition (2) Subset containing samples from all categories
- \(\mathcal{D}^{R^{\prime}}=\left\{\boldsymbol{x}_i^c, \cdots, \boldsymbol{x}_q^c \mid \forall c \in \mathcal{C}\right\}\).
- where \(x_i^k\) is the \(i\)-th sample in the \(k\)-th class of the training set
- \(\mathcal{C}\) is the category set of the original dataset
For brevity, we represent both databases as \(\mathcal{D}^R\).
(3) Retrieval-Augmented Time Series Diffusion
a) Embedding-Based Retrieval Mechanism
Ideal references \(\left\{s_i, \cdots, s_{i+h}\right\}\)
= Samples where preceding \(n\) points \(\left\{s_{i-n}, \cdots, s_{i-1}\right\}\) is most relevant to the historical TS \(\left\{s_j, \cdots, s_{j+n}\right\}\) in the \(\mathcal{D}^R\).
Quantify the reference between TS using the distance between their embeddings
- Pre-trained encoders \(E_\phi\) a
- Trained on representation learning tasks
- Parameter set \(\phi\) is frozen
- \(\mathcal{D}_{\mathrm{emb}}^R=\left\{\left\{i, E_\phi\left(\boldsymbol{x}_{[0: n]}^i\right), \boldsymbol{x}_{[n: n+h]}^i\right\} \mid \forall \boldsymbol{x}^i \in \mathcal{D}^R\right\}\).
- where \([p: q]\) refers to the subsequence formed by the \(p\)-th point to the \(q\)-th point in the TS
- \(\boldsymbol{v}^H=E_\phi\left(\boldsymbol{x}^H\right)\).
Distance between
- (1) \(\boldsymbol{v}^H\)
- (2) all embeddings in \(\mathcal{D}_{\text {emb }}^R\)
Retrieve the references corresponding to the \(k\) smallest distances.
\(\begin{aligned} & \operatorname{index}\left(\boldsymbol{v}^H\right)=\underset{\boldsymbol{x}^i \in \mathcal{D}_{\text {emb }}^R}{\arg \min } \mid \mid \boldsymbol{v}^H-E_\phi\left(\boldsymbol{x}_{[0: n]}^i\right) \mid \mid ^2 \\ & \boldsymbol{x}^R=\left\{\boldsymbol{x}_{[n: n+h]}^j \mid \forall j \in \operatorname{index}\left(\boldsymbol{v}^H\right)\right\} \end{aligned}\).
We obtain a subset \(\boldsymbol{x}^R\) of \(\mathcal{D}^R\) based on a query \(\boldsymbol{x}^H\),
\(\zeta_k: \boldsymbol{x}^H, \mathcal{D}^R \rightarrow \boldsymbol{x}^R\), where \(\mid \mid \boldsymbol{x}^R \mid \mid =k\).
b) Reference-Guided TS Diffusion Model
Reverse process
- Infer the posterior distribution \(p\left(\boldsymbol{z}^{t a r} \mid \boldsymbol{z}^c\right)\)
\(p\left(\boldsymbol{x} \mid \boldsymbol{x}^H\right)=\int p\left(\boldsymbol{x}_T \mid \boldsymbol{x}^H\right) \prod_{t=1}^T p_\theta\left(\boldsymbol{x}_{t-1} \mid \boldsymbol{x}_t, \boldsymbol{x}^H, \boldsymbol{x}^R\right) \mathcal{D} \boldsymbol{x}_{1: T},\).
- where \(p\left(\boldsymbol{x}_T \mid \boldsymbol{x}^H\right) \approx \mathcal{N}\left(\boldsymbol{x}_T \mid \boldsymbol{x}^H, \boldsymbol{I}\right), p_\theta\left(\boldsymbol{x}_{t-1} \mid \boldsymbol{x}_t, \boldsymbol{x}^H, \boldsymbol{x}^R\right)\)
- Assumption: \(p_\theta\left(\boldsymbol{x}_{t-1} \mid \boldsymbol{x}_t, \boldsymbol{x}\right)=\mathcal{N}\left(\boldsymbol{x}_{t-1} ; \mu_\theta\left(\boldsymbol{x}_t, \boldsymbol{x}^H, \boldsymbol{x}^R, t\right), \Sigma_\theta\left(\boldsymbol{x}_t, \boldsymbol{x}^H, \boldsymbol{x}^R, t\right)\right)\).
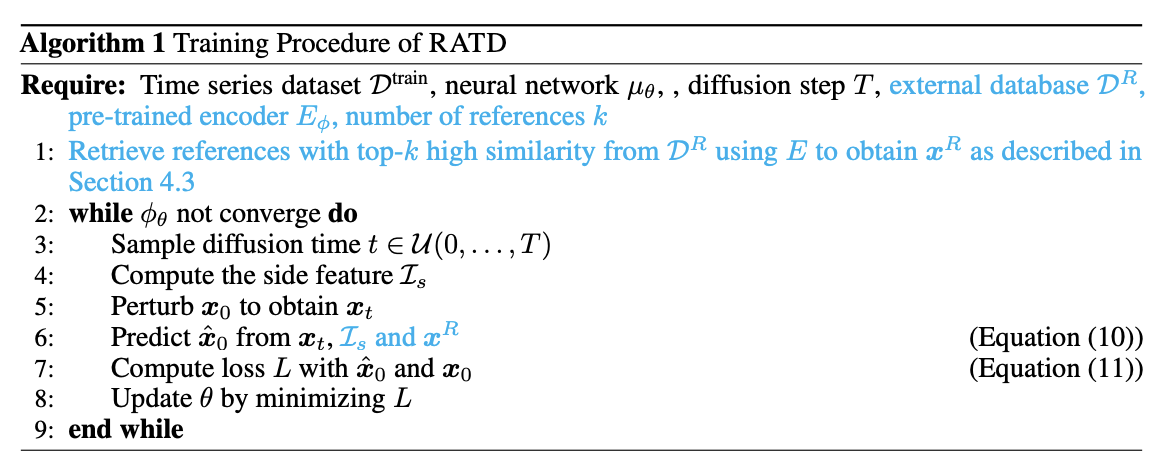
c) Training Procedure
Loss at time step \(t-1\) :
\(\begin{aligned} L_{t-1}^{(x)} & =\frac{1}{2 \tilde{\beta}_t^2} \mid \mid \mu_\theta\left(\boldsymbol{x}_t, \hat{\boldsymbol{x}}_0\right)-\hat{\mu}\left(\boldsymbol{x}_t, \hat{\boldsymbol{x}}_0\right) \mid \mid ^2 \\ & =\gamma_t \mid \mid \boldsymbol{x}_0-\hat{\boldsymbol{x}}_0 \mid \mid \end{aligned}\).
- where \(\hat{\boldsymbol{x}}_0\) are predicted from \(\boldsymbol{x}_t\),
- and \(\gamma_t=\frac{\bar{\alpha}_{t-1} \beta_t^2}{2 \tilde{\beta}_t^2\left(1-\bar{\alpha}_t\right)^2}\)
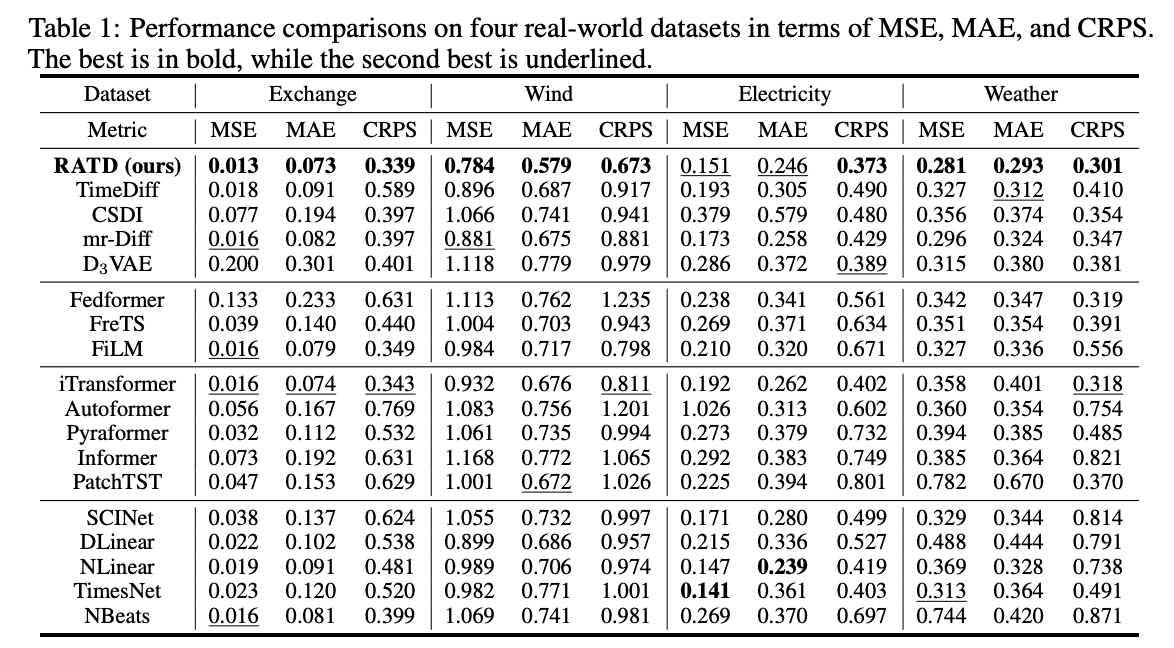
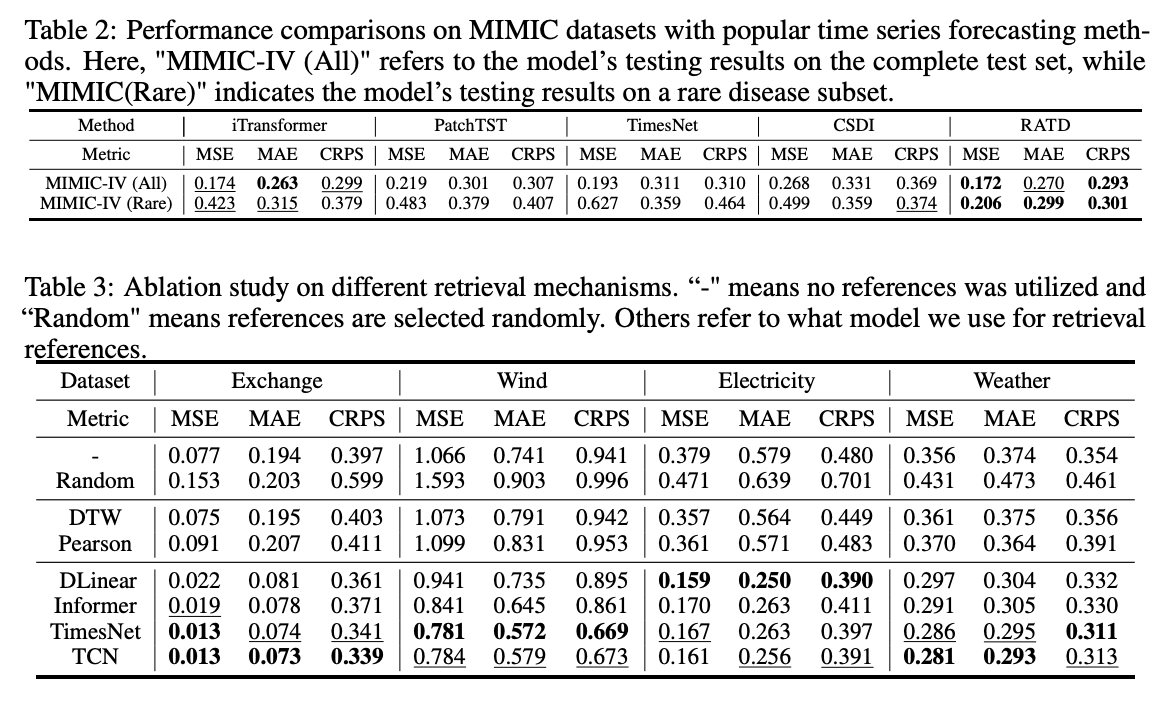
5. Experiments