ROSE: Register Assisted General Time Series Forecasting with Decomposed Frequency Learning
Contents
- Abstract
- Introduction
- Relataed Works
- TS Forecasting
- TS Pre-training
- Methodology
- Architecture
- Decomposed Frequency Learning
- Time series register
- Training
- Experiments
0. Abstract
General TS forecasting models
- pre-trained on a large number of TS datasets
Two challenges:
- (1) How to obtain unified representations from multi-domian TS data
- (2) How to capture domain specific features from TS data
ROSE
Register Assisted General Time Series Forecasting Model with Decomposed Frequency Learning
-
Novel pre-trained model for TS forecasting
-
Pretraining task: Decomposed Frequency Learning
-
decomposes coupled semantic and periodic information in TS
( with frequency-based masking and reconstruction )
-
-
Time Series Register
-
learns to generate a register codebook
- to capture “domain-specific” representations during pretraining
-
enhances “domain-adaptive” transfer
- by selecting related register tokens on downstream tasks
-
SOTA forecasting performance on 8 real-world benchmarks
( + few-shot scenarios )
-
1. Introduction
Challengs of applying general TS model to heterogeneous TS data
- (1) Obtaining a unified representation
- (2) Adaptive transferring information from multi-domain TS to specific downstream scenarios
(1) Obtaining a UNIFIED representation
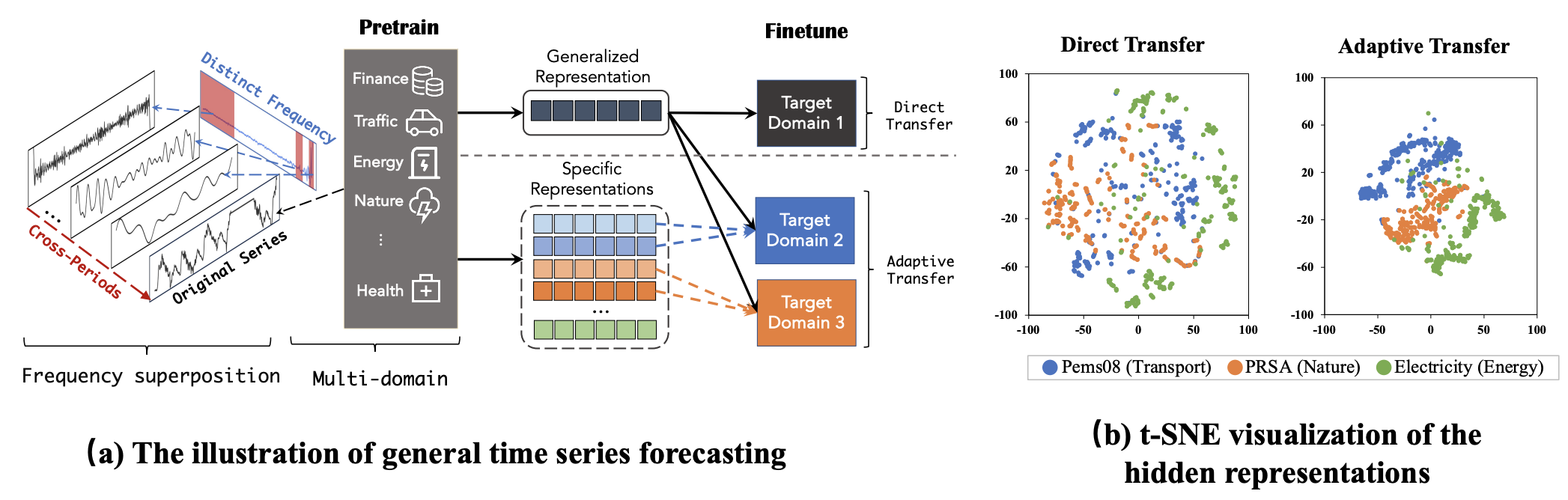
- TS from each domain = multiple frequency components ( = frequency superposition )
- Frequency superposition
- leads to coupled semantic and periodic information in the time domain.
- Large-scale TS data from different domains
- complex temporal patterns and frequency diversity
(2) ADAPTIVE transferring information from multi-domain TS
-
Multi-source TS data originate from various domains
- exhibit domain-specific information
-
Existing time series pre-training frameworks
- focus mainly on capturing generalized features during pre-training
- overlook domain-specific features
\(\rightarrow\) Necessary to learn domain-specific information during pre-training and adaptively transfer the specific representations to each target domain ( = adaptive transfer )
Two difficulties of adaptive transfer
- (a) Capturing domain-specific information in pre-training
- (b) Adaptive use of domain-specific information in various downstream tasks
ROSE
(1) Decomposed Frequency Learning
- Learns generalized representations to solve the issue with coupled semantic and periodic information.
- Step 1) Decomposition with Fourier transform
- With a novel frequency-based mask method
-
Step 2) Convert it back to the time domain
- Obtain decoupled TS for reconstruction.
\(\rightarrow\) Disentanglement … benefit the model to learn generalized representations
(2) Time Series Register (TS-Register)
- Learns domain-specific information in multi-domain data
- Register codebook
- [Pretraining] Generate register tokens to learn each domain-specific information
- [Downstream] Adaptively selects vectors from the register codebook that are close to the target domain of interest.
- During fine-tuning, we incorporate learnable vectors into the selected register tokens to complement target specific information to perform more flexible adaptive transfer.
Contribution
- ROSE = Novel general TS forecasting model
- using multi-domain datasets for pre-training
- improve downstream fine-tuning performance and efficiency.
-
Propose a novel Decomposed Frequency Learning
-
employs multi-frequency masking to decouple complex temporal patterns
\(\rightarrow\) empowers the model’s generalization capability
-
- Propose TS-Register
- (pre-training) to capture domain-specific information
- (fine-tuning) enables adaptive transfer of target-oriented specific information for downstream tasks
- Our experiments with 8 real-world benchmarks
2. Related Works
(1) TS forecasting
pass
(2) TS pre-training
Multi-source TS pre-training
- MOMENT [31] and MOIRAI [8]
- adopt a BERT-style pre-training approach
- Timer [2] and PreDcT [32]
- use a GPT-style pre-training approach, giving rise to improved performance in TS prediction.
\(\rightarrow\) Above methods overlook domain-specific information from multisource data
ROSE
-
Pre-trains on large-scale data from various domains
-
Considers both generalized representations and domain-specific information
\(\rightarrow\) Facilitates flexible adaptive transfer in downstream tasks
3. Methodology
Problem Definition
Multivariate TS: \(\mathbf{X}_t=\left\{\mathbf{x}_{t-L: t}^i\right\}_{i=1}^C\), where \(\mathbf{x}_{t-L: t}^i \in \mathbb{R}^L\)
- \(L\) : look-back window
- \(C\) : number of channels
Forecasting task
- Predict the future values \(\hat{\mathbf{Y}}_t=\left\{\hat{\mathbf{x}}_{t: t+F}^i\right\}_{i=1}^C\),
- \(F\): forecast horizon
- \(\mathbf{Y}_t=\left\{\mathbf{x}_{t: t+F}^i\right\}_{i=1}^C\) : ground truth
General TS forecasting model
- [Pre-train] with multi-source datasets \(\mathbf{D}_{\text {pre-train }}=\) \(\left\{\left(\mathbf{X}_t^j, \mathbf{Y}_t^j\right)\right\}_{j=1}^N\),
- where \(N\) is the number of datasets.
- [Downstream task]
- fine-tuned with a training dataset \(\mathbf{D}_{\text {train }}=\left\{\left(\mathbf{X}_t^{\text {train }}, \mathbf{Y}_t^{\text {train }}\right)\right\}\)
- tested with \(\mathbf{D}_{\text {test }}=\left\{\left(\mathbf{X}_t^{\text {test }}, \mathbf{Y}_t^{\text {test }}\right)\right\}\) to predict \(\hat{\mathbf{Y}}_t^{\text {test }}\),
- where \(\mathbf{D}_{\text {pre-train }}, \mathbf{D}_{\text {train }}\) and \(\mathbf{D}_{\text {test }}\) are pairwise disjoint.
( + Alternatively, the model could be directly tested using \(\mathbf{D}_{\text {test }}\) without fine-tuning with \(\mathbf{D}_{\text {train }}\) to predict \(\hat{\mathbf{Y}}_t^{\text {test }}\) )
(1) Architecture
TS forecasting paradigm of ROSE contains two steps
- (1) Pre-training
- pre-trained on large-scale datasets from various domains, with
- 1-1) Reconstruction
- 1-2) Prediction
- pre-trained on large-scale datasets from various domains, with
- (2) Fine-tuning
- fine-tunes with a target dataset in the downstream scenario
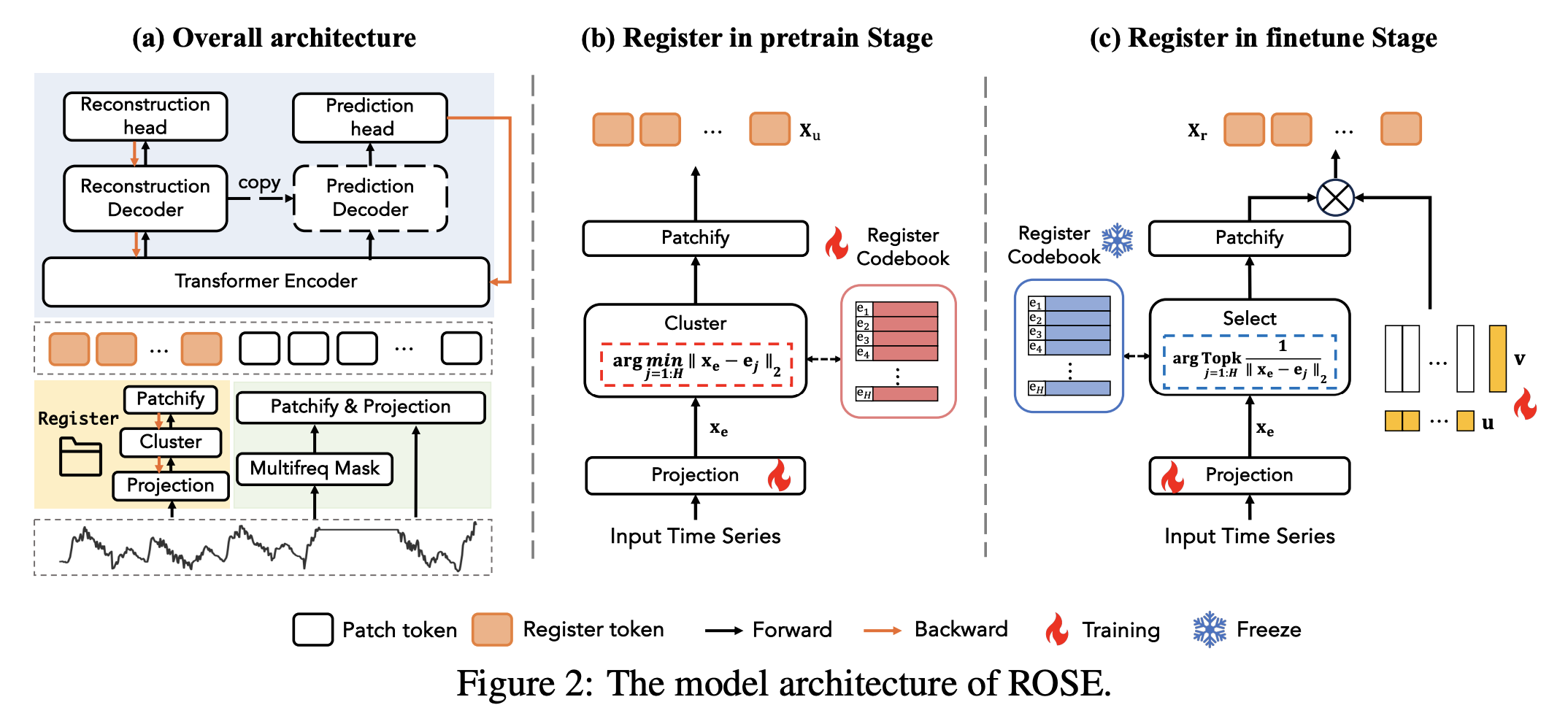
- Encoder-Decoder architecture
- Backbone = Transformer
- effectively capture temporal dependencies
- Channel-independent (CI)
a) Input Representations
To enhance the generalization of ROSE for adaptive transferring ..
\(\rightarrow\) model the inputs \(\mathbf{x}\) with patch tokens and register tokens
Two tokens
- (1) Patch tokens
- obtained by partitioning the TS using patching layers
- (2) Register tokens
- obtained by linear mapping and clustering each of the entire TS input into discrete embedding
- to capture domain-specific information
(2) Decomposed frequency learning
TS = composed of multiple combined frequency components
- Resulting in overlapping of different temporal variations.
- Low-frequency
- overall trends and longer-scale variations
- High-frequency
- information about short-term fluctuations and shorter-scale variations
\(\rightarrow\) Propose decomposed frequency learning
- based on multi-freq masking
- to understand the TS from multiple-frequency perspectives
- which enhances the model’s ability to learn generalized representations
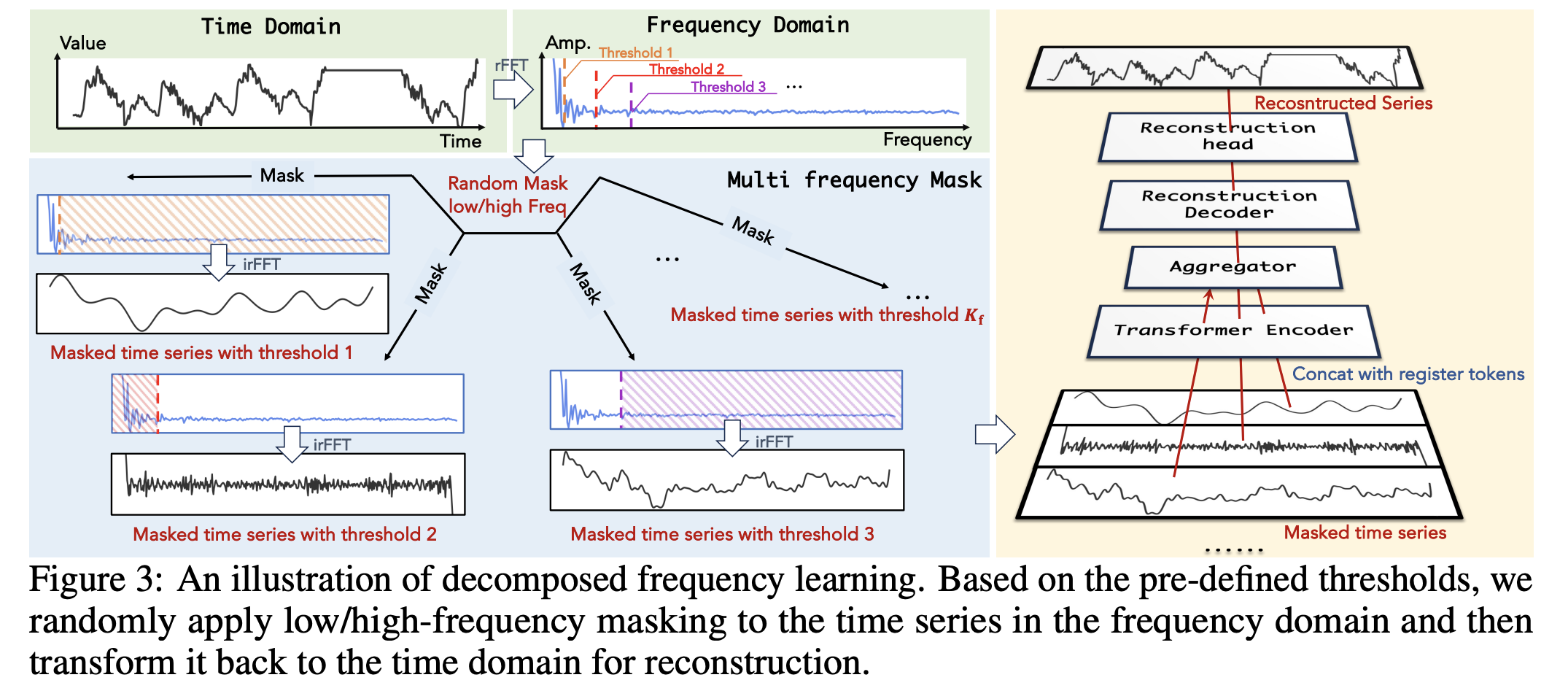
b) Multi-freq masking
\[\mathbf{x}_{\text {freq }}=\operatorname{rFFT}(\mathbf{x})\]-
Input: \(\mathbf{x} \in \mathbb{R}^L\),
-
Real Fast Fourier Transform \((\mathrm{rFFT})\)
-
Output: \(\mathbf{x}_{\mathrm{freq}} \in \mathbb{R}^{L / 2}\).
To separately model high-frequency and low-frequency information …
Sample …
- \(K_{\mathrm{f}}\) thresholds: \(\tau_1, \tau_2, \tau_3, \ldots, \tau_{K_{\mathrm{f}}}\)
- where \(\tau \in \operatorname{Uniform}(0, a), a<L / 2\),
- \(K_{\mathrm{f}}\) random numbers: \(\mu_1, \mu_2, \mu_3, \ldots, \mu_{K_{\mathrm{f}}}\)
- where \(\mu \in \operatorname{Bernoulli}(1, p)\).
for multi-frequency masks
Each pair of \(\tau_i\) and \(\mu_i\) = \(i_{\text {th }}\) frequency mask
\(\rightarrow\) Generates a mask matrix \(\mathbf{M} \in\{0,1\}^{K_{\mathrm{f}} \times L / 2}\),
- Row = \(i_{t h}\) frequency mask
- Column = \(j_{t h}\) frequency
- mask=0: masked
- mask=1: unmasked
\(m_{i j}=\left\{\begin{array}{cl} \mu_i & , \text { if } \mathbf{x}_{\mathrm{freq}_j}<\tau_i \\ \left(1-\mu_i\right) & , \text { if } \mathbf{x}_{\mathrm{freq}_j}>\tau_i \end{array},\right.\).
- \(\tau_i\) and \(\mu_i\) : threshold and random number for the \(i_{t h}\) frequency domain mask
- \(\mathbf{x}_{\text {freq }_j}\) : \(j_{t h}\) frequency of \(\mathbf{x}_{\text {freq }}\).
- If \(\mu_i=1\) … mask HIGH frequency
- If \(\mu_i=o\) … mask LOW frequency
\(\mathbf{X}_{\text {mask }}=\operatorname{irFFT}\left(\mathbf{X}_{\text {freq }} \odot \mathbf{M}\right)\).
-
Step 1) After obtaining the mask matrix \(\mathbf{M}\), ….
-
Step 2) Replicate \(\mathbf{x}_{\text {freq }}\) of \(K_{\mathrm{f}}\) times
\(\rightarrow\) Get the \(\mathbf{X}_{\text {freq }} \in \mathbb{R}^{K_{\mathrm{f}} \times L / 2}\)
-
Step 3) Element-wise Hadamard product with the mask matrix \(\mathbf{M}\)
\(\rightarrow\) Get masked frequency of TS
-
Step 4) inverse Real Fast Fourier Transform (irFFT) to convert
\(\rightarrow\) Get \(K_{\mathrm{f}}\) masked sequences \(\mathbf{X}_{\text {mask }}=\left\{\mathbf{x}_{\text {mask }}^i\right\}_{i=1}^{K_{\mathrm{f}}}\),
- where each \(\mathbf{x}_{\text {mask }}^i \in \mathbb{R}^L\) corresponding to masking with a different threshold \(\tau_i\).
c) Representation learning
Step Divide each sequence \(\mathbf{x}_{\text {mask }}^i\) into \(P\) non-overlapping patches
- \(\mathbf{x}_{\text {mask }}^i \in \mathbb{R}^L\).
Step 2) Patch Embedding … \(P\) patch tokens ( with linear layer)
\(\rightarrow\) Get \(\mathcal{X}_{\mathrm{mp}}=\left\{\mathbf{X}_{\mathrm{mp}}^i\right\}_{i=1}^{K_{\mathrm{f}}}\) to capture general information
- where \(\mathbf{X}_{\mathrm{mp}}^i \in \mathbb{R}^{P \times D}\)
Step 3) Replicate the register tokens \(\mathbf{X}_{\mathrm{u}}\) of \(K_{\mathrm{f}}\) times
\(\rightarrow\) Get \(\mathcal{X}_{\mathrm{u}} \in \mathbb{R}^{K_{\mathrm{f}} \times N_{\mathrm{r}} \times D}\)
- where \(\mathbf{X}_{\mathrm{u}} \in \mathbb{R}^{N_{\mathrm{r}} \times D}\) is obtained by inputting the original sequence into the TS-Register,
Step 4) Concatenate (a) & (b)
- (a) Patch tokens \(\mathcal{X}_{\mathrm{mp}}\)
- (b) Register tokens \(\mathcal{X}_{\mathrm{u}}\)
Step 5) Transformer encoder
- Representation of each masked series.
- Aggregated to yield a unified representation \(\mathbf{S} \in \mathbb{R}^{\left(N_{\mathrm{r}}+P\right) \times D}\) :
\(\left.\left.\mathbf{S}=\text { Aggregator(Encoder(Concatenate }\left(\mathcal{X}_{\mathrm{mp}}, \mathcal{X}_{\mathrm{u}}\right)\right)\right)\).
d) Reconstruction task
Feed \(\mathbf{S}\) into the reconstruction decoder
Reconstruct the original sequence \(\hat{\mathbf{x}} \in \mathbb{R}^L\)
Note thta frequency domain masking affects the overall TS, we compute the Mean Squared Error (MSE) reconstruction loss for the entire TS
- \(\mathcal{L}_{\text {reconstruction }}= \mid \mid d\mathbf{x}-\hat{\mathbf{x}} \mid \mid d_2^2\).
(3) Time series register
By decomposed frequency learning…
\(\rightarrow\) we can obtain the domain-GENERAL representations
Additionally, propose the TS-Register for domain-SPECIFIC information
TS-Register
- Step 1) Clusters domain-specific information into register tokens
- Step 2) (Pre-training) Stores such domain-specific information in the register codebook
- Step 3) (Fine-tuning) Adaptively selects similar information from the register codebook
- to enhance the target domain
Details
- Randomly initialized register codebook \(\mathbf{E} \in \mathbb{R}^{H \times D_{\mathrm{r}}}\)
- with \(H\) cluster center vectors \(\mathbf{e}_i \in \mathbb{R}^{D_{\mathrm{r}}}, i \in\{1,2, \ldots, H\}\).
- Projection: input TS \(\mathbf{x} \in \mathbb{R}^L\) \(\rightarrow\) embedding \(\mathbf{x}_{\mathrm{e}} \in \mathbb{R}^{D_{\mathrm{r}}}\)
- through a linear layer.
a) Pre-training stage.
-
Use the register codebook to cluster these embeddings
( which generate domain-specific information )
- Store them in pre-training.
- Find a cluster center vector \(\mathbf{e}_\delta\) from the register codebook \(\mathbf{E}\)
- \(\delta=\underset{j=1: H}{\arg \min } \mid \mid d\mathbf{x}_{\mathrm{e}}-\mathbf{e}_j \mid \mid d_2\).
- To update the cluster center vectors … loss function:
- \(\mathcal{L}_{\text {register }}= \mid \mid d\operatorname{sg}\left(\mathbf{x}_{\mathrm{e}}\right)-\mathbf{e}_\delta \mid \mid d_2^2+ \mid \mid d\mathbf{x}_{\mathrm{e}}-\operatorname{sg}\left(\mathbf{e}_\delta\right)\mid \mid d_2^2\).
- First term = update the register codebook \(\mathbf{E}\),
- Second term = update the parameters of the linear layer that learns \(\mathbf{x}_{\mathrm{e}}\).
- \(\mathcal{L}_{\text {register }}= \mid \mid d\operatorname{sg}\left(\mathbf{x}_{\mathrm{e}}\right)-\mathbf{e}_\delta \mid \mid d_2^2+ \mid \mid d\mathbf{x}_{\mathrm{e}}-\operatorname{sg}\left(\mathbf{e}_\delta\right)\mid \mid d_2^2\).
Summary: Vectors in the register codebook \(\mathbf{E}\)
-
cluster the embeddings of different data
-
learn the domain-specific centers for pre-trained datasets
( = represent domain-specific information )
\(\mathbf{X}_{\mathrm{u}} \in \mathbb{R}^{N_{\mathrm{r}} \times D}\) = register tokens
- Cluster center vector \(\mathbf{e}_\delta\) is then patched into register tokens
- \(N_{\mathrm{r}}\): # of the register tokens
- Used as the prefix of the patch tokens \(\mathbf{X}_{\mathrm{p}} \in \mathbb{R}^{P \times D}\)
- provide domain-specific information.
b) Fine-tuning stage
Freeze the register parameters
- to adaptively use this domain-specific information
top-k strategy
- Selects top-k similar vectors in the register codebook
- Uses their average as \(\overline{\mathbf{e}}_k\)
- \(\rightarrow\) also patched into \(\mathbf{X}_{\mathrm{d}} \in \mathbb{R}^{N_{\mathrm{r}} \times D}\)
\(\overline{\mathbf{e}}_k=\frac{1}{k} \sum_{i=1}^k \mathbf{e}_{\delta_i},\{\delta_1, \cdots, \delta_k\}=\underset{j=1: H}{\arg \operatorname{Topk}}(\frac{1}{\mid \mid d\mathbf{x}_{\mathrm{e}}-\mathbf{e}_j \mid \mid d_2}) .\).
Additionally set a matrix \(\mathbf{A} \in \mathbb{R}^{N_{\mathrm{r}} \times D}\) to adjust \(\mathbf{X}_{\mathrm{d}}\)
\(\rightarrow\) to complement the specific information of downstream data.
\(\mathbf{A}\) is set as a low-rank matrix:
- \(\mathbf{A}=\mathbf{u} \times \mathbf{v}^{\mathrm{T}}\).
- where \(\mathbf{u} \in \mathbb{R}^{N_{\mathrm{r}}}\) and \(\mathbf{v} \in \mathbb{R}^D\),
- only the vectors \(\mathbf{u}\) and \(\mathbf{v}\) need to be retrained in the fine-tuning step
Register token \(\mathbf{X}_{\mathrm{r}}\) of the downstream scenario
- \(\mathbf{X}_{\mathrm{r}}=\mathbf{X}_{\mathrm{d}} \odot \mathbf{A}\).
- \(\mathbf{X}_{\mathrm{d}}\) = domain-specific information obtained at the pre-train stage
- \(\mathbf{A}\) = downstream dataset-specific information.
(4) Training
Co-train ..
- (1) Supervised prediction
- (2) Self-supervised reconstruction
Why (1)?
- Uses multi-frequency mask to learn unified features that are more applicable to the downstream prediction task.
a) Prediction task (SL)
Notation
- Input TS: \(\mathbf{x} \in \mathbb{R}^L\)
- Spliced Input TS & Mapped : \(\mathbf{X}_{\mathrm{p}} \in \mathbb{R}^{P \times D}\)
Four prediction heads
- mapping to prediction lengths of \(\{96,192,336,720\}\)
Concatenation
- (1) Patch tokens \(\mathbf{X}_{\mathrm{p}}\)
- (2) Register tokens \(\mathbf{X}_{\mathrm{u}}\)
\(\rightarrow\) [(1), (2)] Feed into the transformer encoder, prediction decoder, and prediction heads to obtain four prediction results \(\hat{\mathbf{Y}}_F\), where \(F \in\) \(\{96,192,336,720\}\).
\(\mathcal{L}_{\text {prediction }}=\sum_{F \in\{96,192,336,720\}} \mid \mid d\mathbf{Y}_F-\hat{\mathbf{Y}}_F \mid \mid d_2^2\).
b) Pre-training
Learns generalized features
\(\rightarrow\) Parameters of the reconstruction decoder are copied to the prediction decoder
( To avoid prediction training affecting the generalization performance of the model, the gradients of the prediction heads are skipped at back-propagation )
Overall pre-training loss
\(\mathcal{L}_{\text {pre-train }}=\mathcal{L}_{\text {reconstruction }}+\mathcal{L}_{\text {prediction }}+\mathcal{L}_{\text {register }}\).
c) Fine-tuning
pass
4. Experiments
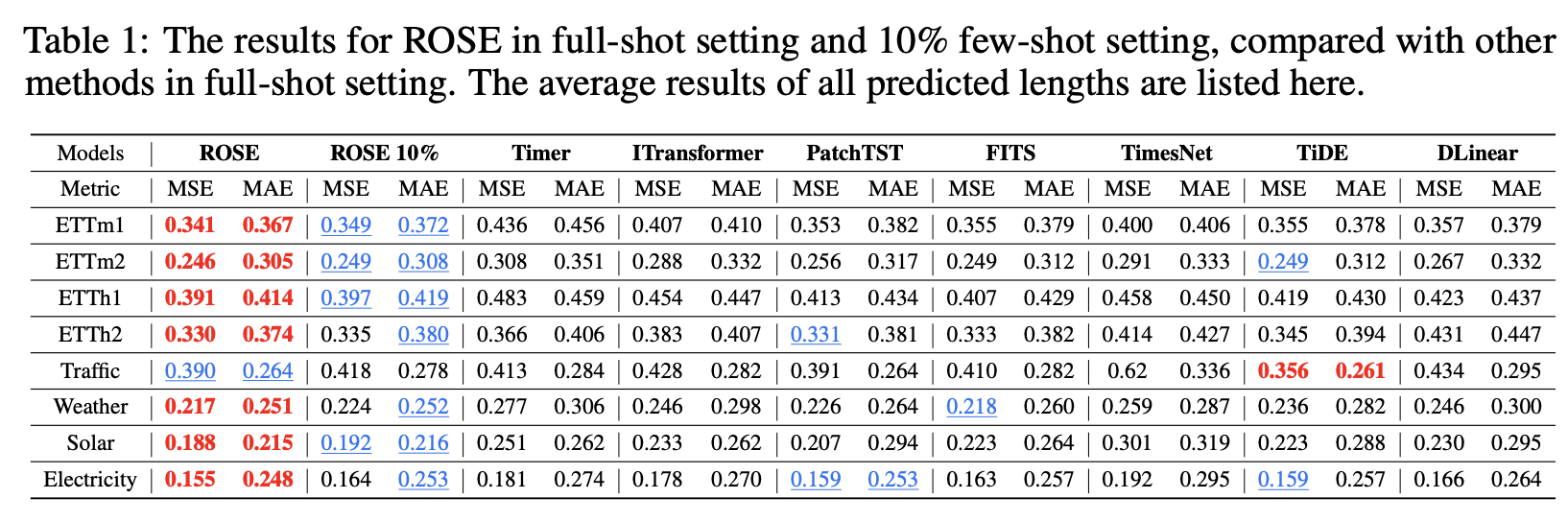
(1) Main Results
(2) Ablation studies

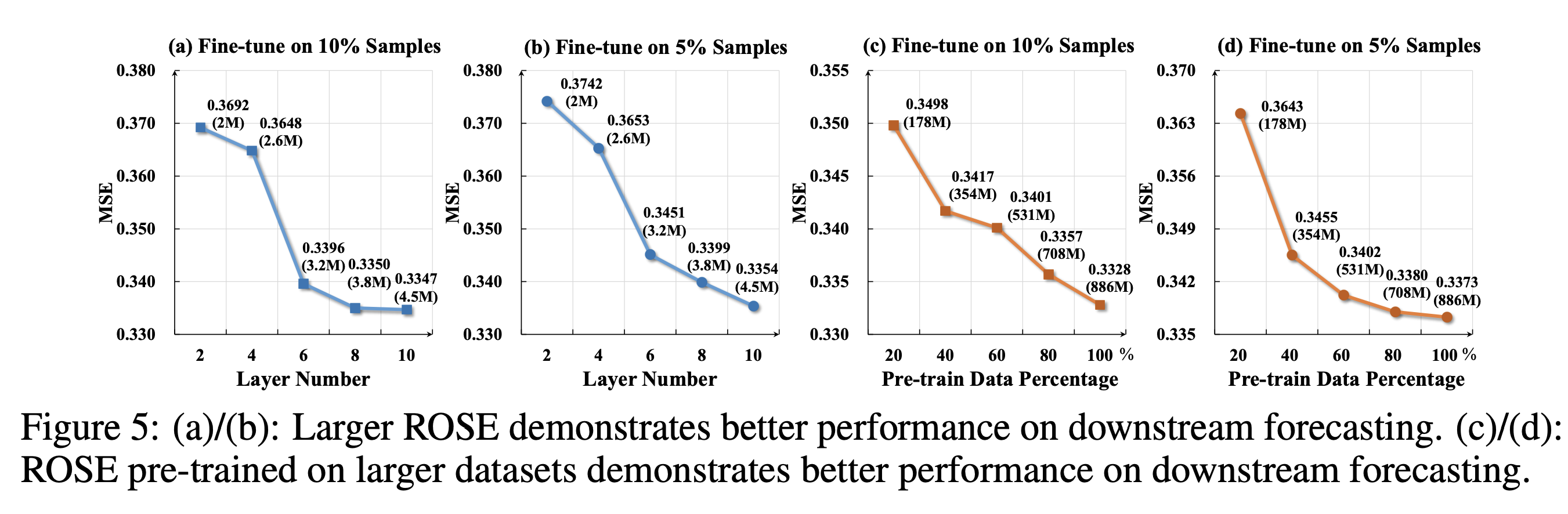
(3) Scalability
(4) Model Analysis
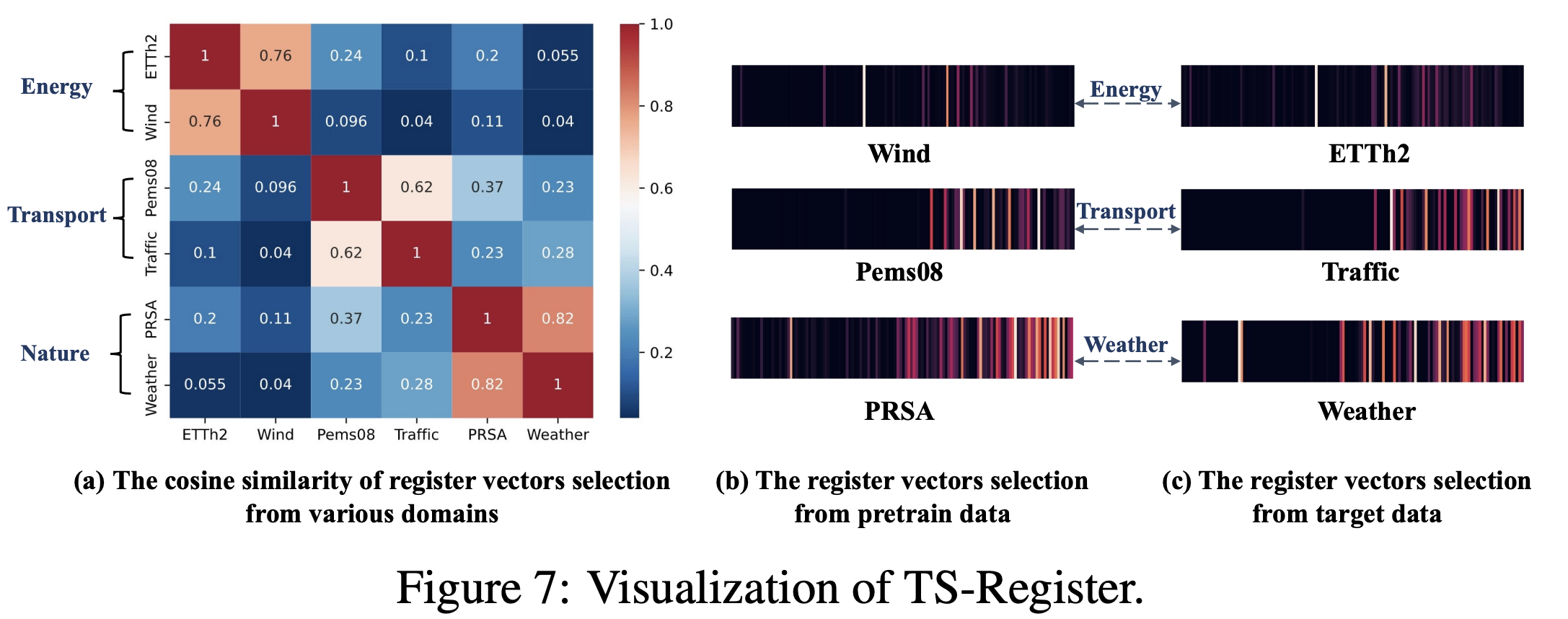
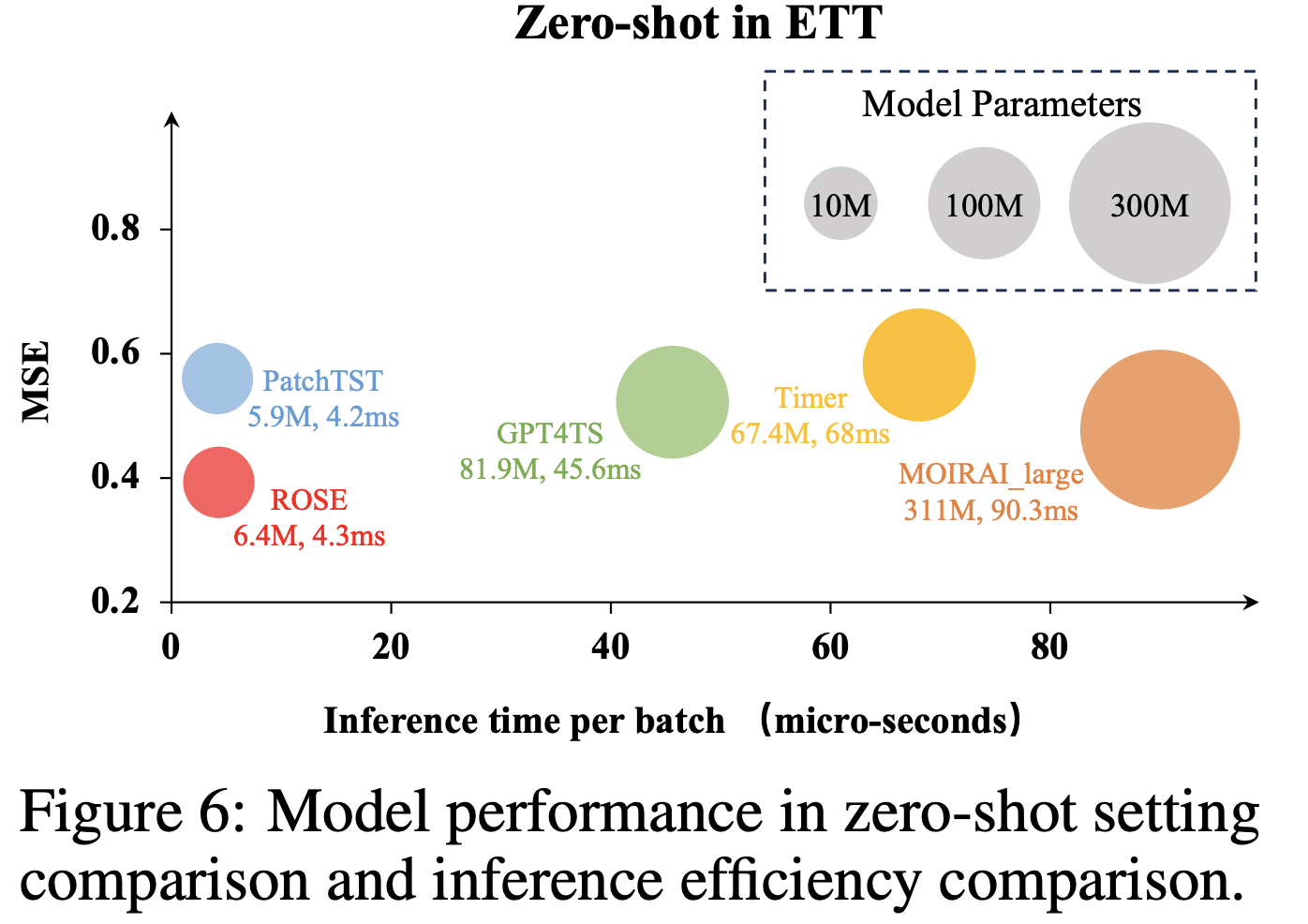
a) Zero-shot & Inference efficiency
b) Visuaalization of TS-Register