
TiVaT: Jonit-Axis Attention for TIme Series Forecasting with Lead-Lag Dynamics
Contents
- Abstract
- Introduction
- Methodology
0. Abstract
Simultaneously capturing both TD & CD (VD) remains a challenging
Previous works
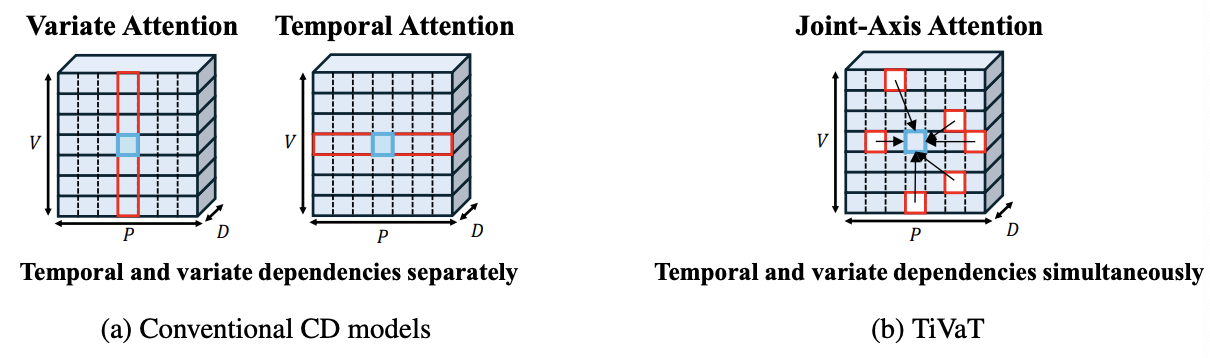
- CD models: handle these dependencies separately
- Limitation in lead-lag dynamics.
TiVaT (Time-Variable Transformer)
(1) Integrates TD& VD via Joint-Axis (JA) attention
- Capture variate-temporal dependencies
(2) Further enhanced by Distance-aware Time-Variable (DTV) Sampling
- Reduces noise and improves accuracy through a learned 2D map that focuses on key interactions
1. Introduction
CD models = Handle temporal and inter-variable dependencies separately
\(\rightarrow\) Limiting their ability to capture more complex interactions between variables and temporal dynamics
( i.e. lead-lag relationships )
Why not do both?
\(\rightarrow\) Significant increase in computational cost and model complexity
TiVaT (Time-Variable Transformer)
Capture both temporal and variate dependencies simultaneously
Joint-Axis (JA) attention mechanism
A key feature of TiVaT
= Integration of offsets inspired by
- deformable attention (Zhu et al., 2020)
- Distance-aware Time-Variable (DTV) Sampling
DTV Sampling technique
Constructs a learned 2D map to capture both spatial and temporal distances between variables and time steps
- Not only reduces computational overhead
- But also mitigates noise!
\(\rightarrow\) Scale efficiently to high-dimensional datasets without sacrificing performance.
Incorporates TS decomposition
- To capture long-term trends and cyclical patterns
2. Methodology
Notation
- \(\mathbf{X}=\left\{\mathbf{x}_{T-L_H+1}, \ldots, \mathbf{x}_T\right\} \in \mathbb{R}^{L_H \times V}\) .
- \(\mathbf{X}_{(t,:)} \in \mathbb{R}^V\),
- \(\mathbf{X}_{(:, v)} \in \mathbb{R}^{L_H}\),
- \(\mathbf{Y}=\left\{\mathbf{x}_{T+1}, \ldots, \mathbf{x}_{T+L_F}\right\} \in \mathbb{R}^{L_F \times V}\).
MTS forecasting is challenging because it requires capturing complex relationships along both the variate and temporal axes
(1) Overview
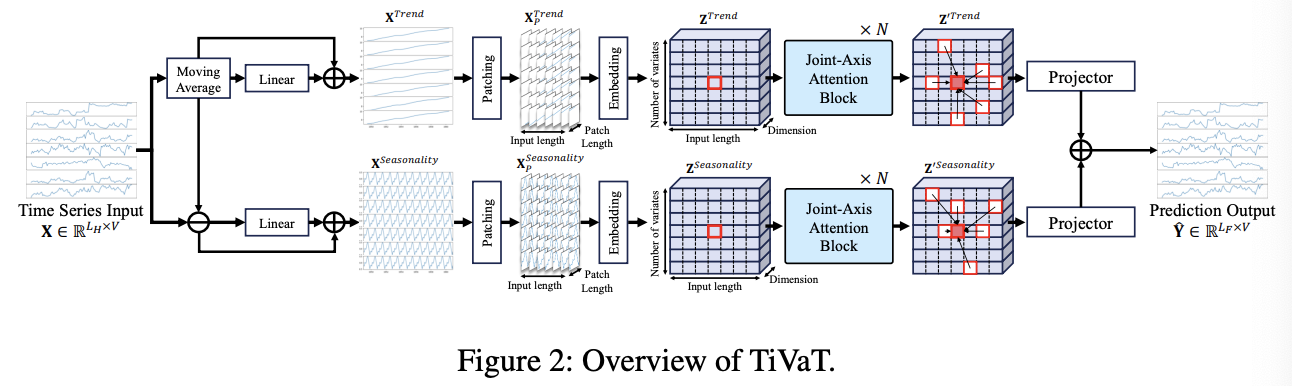
\(\begin{aligned} \mathbf{X}^{\text {Trend }} & =M A(\mathbf{X}) \\ \mathbf{X}^{\text {Seasonality }} & =\mathbf{X}-\mathbf{X}^{\text {Trend }} \\ \mathbf{X}^{\text {Trend }} & =\mathbf{X}^{\text {Trend }}+\text { Linear }\left(\mathbf{X}^{\text {Trend }}\right) \\ \mathbf{X}^{\text {Seasonality }} & =\mathbf{X}^{\text {Seasonality }}+\text { Linear }\left(\mathbf{X}^{\text {Seasonality }}\right), \end{aligned}\).
Decomposed components
- \(\mathbf{X}^{\text {Trend }}\) and \(\mathbf{X}^{\text {Seasonality }}\)
- Processed through separate sibling architectures
Architectures
- (1) Patching + Embedding
- 1-1) Patch: \(X_P \in \mathbb{R}^{L_N} \times V \times L_P\)
- 1-2) Token: \(Z \in \mathbb{R}^{L_N \times V \times D}\)
- Via embedding layer \(E: \mathbb{R}^{L_N \times V \times L_P} \rightarrow \mathbb{R}^{L_N \times V \times D}\)
- (2) JA attention blocks
- (3) Projector
- 3-1) Trend prediction
- 3-2) Seasonality prediction
- Common predictor
- \(\operatorname{Proj}: \mathbb{R}^{L_N \times V \times D} \rightarrow\) \(\mathbb{R}^{L_F \times V}\)
Summary
- \(\hat{\mathbf{Y}}=\operatorname{Proj}\left(\operatorname{Enc}\left(E\left(X_P^{\text {Trend }}\right)+P E\right)\right)+\operatorname{Proj}\left(\operatorname{Enc}\left(E\left(X_P^{\text {Seasonality }}\right)+P E\right)\right)\).
(2) Joint-Axis Attention Module
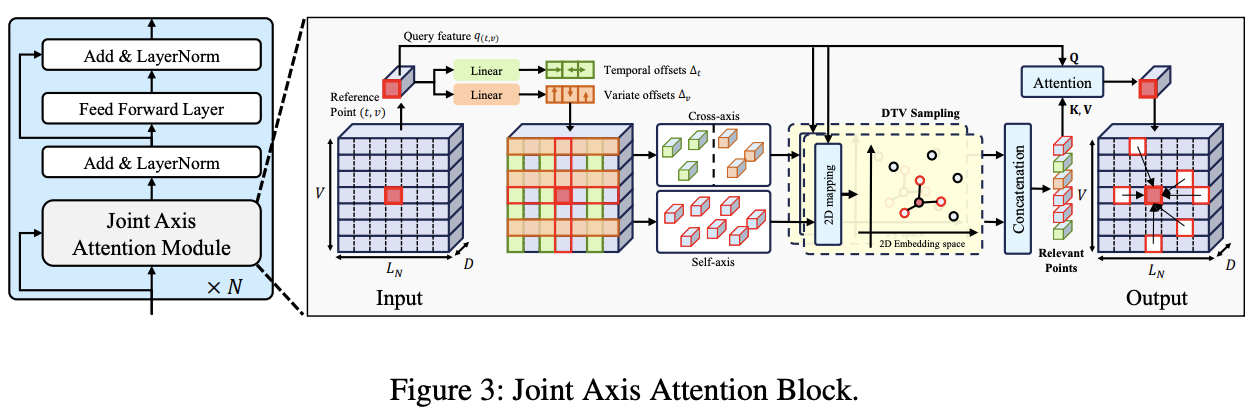
Joint-Axis Attention block
- Transformer encoder block
- Replacing self-attention with the JA attention module
-
Inspired by Deformable attention module (Zhu et al., 2020),
= Capture relationships between a feature vector \(Z_{(t, v)}\) and other feature vectors \(Z_{\left(t^{\prime}, v^{\prime}\right)}\), where \(t \neq t^{\prime}, v \neq v^{\prime}\), or both.
- Unlike the deformable attention, the JA attention module uses offset points as guidelines to minimize information loss
-
Uses the DTV sampling to capture relationships with other points that are highly relevant
- Efficient compared to full attention
- As it avoids processing less relevant points
Deformable Attention
Introduced to tackle the inefficiencies of self-attention operations in CV
How does it work?
-
Extracts offset points
- based on the query feature \(q_{(t, v)}\) at the reference point \((t, v)\)
-
Attention operation is performed accordingly
-
Efficiently consider all axes,
while also offering computational efficiency compared to self-attention at every location.
[ Fig. 3 ]
-
\(Z \in \mathbb{R}^{L_N \times V \times D}\).
- [TS] Temporal & variable axes
- [CV] Width & height axes
-
Offset points can indentify relationships between
- the reference point
- the other data points
across both axes.