Unified Training of Universal Time Series Forecasting Transformers
Contents
- Abstract
- Introduction
- Reatled Work
- Method
- Problem Formulation
- Architecture
- Unified Training
- Experiments
- In-distribution Forecasting
- OOD / Zero-shot Forecasting
- Ablation Study
Abstract
Universal forecasting,
- Pre-training on a vast collection of TS datasets
- Large Time Series Model
Challenges
- (1) Cross-frequency learning
- (2) Arbitrary number of variates for MTS
- (3) Varying distributional properties inherent in large-scale data.
Masked EncOder-based UnIveRsAl TS Forecasting Transformer (MOIRAI)
Dataset: Large-scale Open Time Series Archive (LOTSA)
- featuring over 27B observations
- across 9 domains
1. Introduction
Universal forecasting paradigm
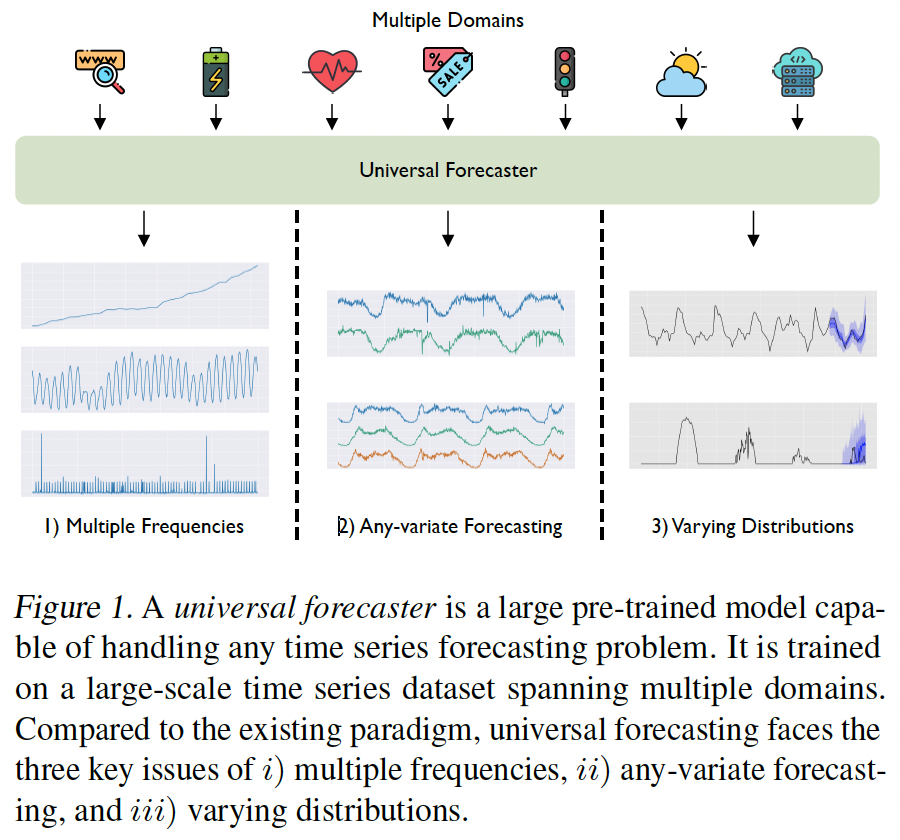
Challenges: highly heterogeneous.
(1) Frequency
\(\rightarrow\) Cross-frequency learning has been shown to be a challenging!
- Due to negative interference (Van Ness et al., 2023)
- Existing work) simply avoiding this problem
- just learn one model per frequency
(2) Dimensionality
- While considering each variate of a multivariate time series independently can sidestep this problem, we expect a universal model to be sufficiently flexible to consider multivariate interactions & exogenous covariates
(3) Probabilistic forecasting
(4) Requires a large-scale dataset from diverse domains
Masked Encoder
Novel modifications
( to handle the heterogeneity of arbitrary TS data )
- (1) “Multiple” input and output projection layers
- To handle varying frequencies
- use patch-based projections with larger patch sizes for high-frequency data
- (2) Any-variate Attention,
- To address the problem of varying dimensionality
- simultaneously considers both time and variate axes as a single sequence
- Rotary Position Embeddings (RoPE) (Su et al., 2024) \(\rightarrow\) to encode TIME axes
- learned binary attention biases (Yang et al., 2022b) \(\rightarrow\) to encode VARIATE axes
- (3) Mixture of parametric distributions
- To overcome the issue of requiring flexible predictive distributions
- (4) Others: optimizing the NLL of a flexible distribution
2. Related Work
(1) Pre-training for Zero-shot Forecasting
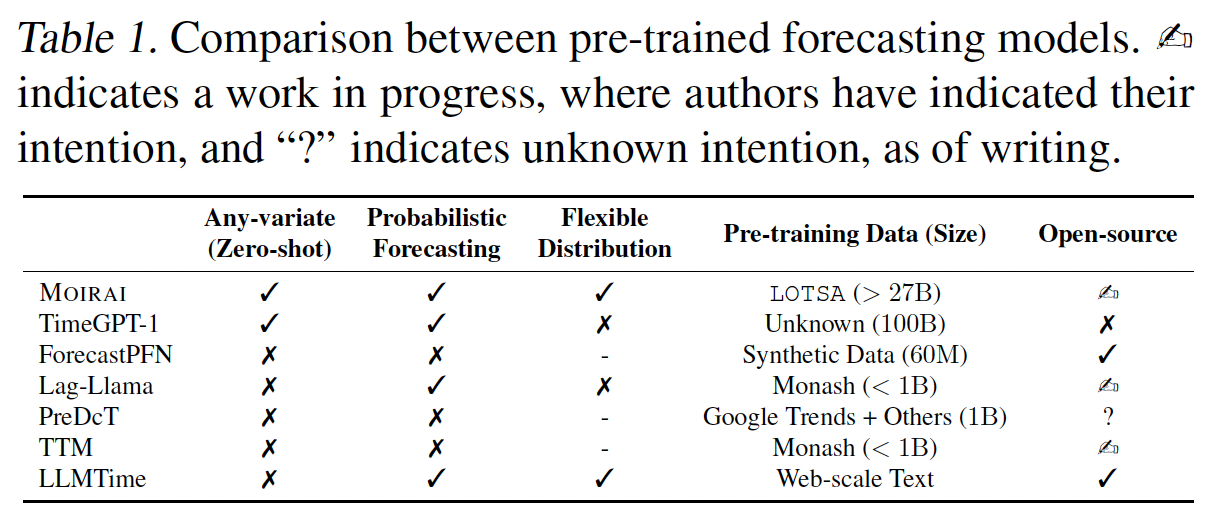
TimeGPT-1 (Garza & Mergenthaler-Canseco, 2023)
-
first presented a closed source model
-
zero-shot forecasting
( + fine-tuning through an API )
ForecastPFN (Dooleyet al., 2023)
- pre-train on synthetic TS
- which can be subsequently be leveraged as a zero-shot forecaster
- specialized for data or time limited settings
Lag-llama (Rasul et al., 2023)
- foundation model for TS forecasting
- leveraging the LLaMA (Touvron et al., 2023) architecture
- use lagged TS features
- presents neural scaling laws for TS forecasting
PreDcT (Das et al., 2023b)
- patch-based decoder-only foundation model for TS forecasting
- larger output patch size for faster decoding
- Dataset) private dataset from Google Trends + opendata
Tiny Time Mixers (TTMs) (Ekambaram et al., 2024)
- concurrent work leveraging lightweight mixer-style architecture.
- data augmentation by downsampling high-frequency TS
- support multivariate downstream tasks
- by fine-tuning an exogenous mixer
LLMTime (Gruver et al., 2023)
- treats TS as strings
- apply careful pre-processing based on the specific LLMs’ tokenizer
(2) Pre-train + Fine-tune for TS Forecasting
Denoising autoencoders (Zerveas et al., 2021)
Contrastive learning (Yue et al., 2022; Woo et al., 2021)
\(\rightarrow\) Pre-training and fine-tuning on the same dataset
SimMTM
- combining both reconstruction and contrastive based pre-training approaches
- initial explorations into cross-dataset transfer
Reprogramming
- fine-tuning the model weights of an LLM for downstream tasks for other modalities
- ex) Zhou et al. (2023), Jin et al. (2023)
- introduce modules and fine-tuning methods to adapt LLMs for TS tasks
3. Method
(1) Problem Formulation
Dataset of \(N\) time series \(\mathcal{D}=\left\{\left(\boldsymbol{Y}^{(i)}, \boldsymbol{Z}^{(i)}\right)\right\}_{i=1}^N\),
- \(\boldsymbol{Y}^{(i)}=\) \(\left(\boldsymbol{y}_1^{(i)}, \boldsymbol{y}_2^{(i)}, \ldots, \boldsymbol{y}_{T_i}^{(i)}\right) \in \mathbb{R}^{d_{y_i} \times T_i}\) : target TS
- \(\boldsymbol{Z}^{(i)}=\left(\boldsymbol{z}_1^{(i)}, \boldsymbol{z}_2^{(i)}, \ldots, \boldsymbol{z}_{T_i}^{(i)}\right) \in\mathbb{R}^{d_{z_i} \times T_i}\) : set of covariates
Goal: forecast the predictive distribution \(p\left(\boldsymbol{Y}_{t: t+h} \mid \boldsymbol{\phi}\right)\)
Model: \(f_{\boldsymbol{\theta}}:\left(\boldsymbol{Y}_{t-l: t}, \boldsymbol{Z}_{t-l: t+h}\right) \mapsto \hat{\boldsymbol{\phi}}\)
Loss function:
\(\begin{aligned} & \max _{\boldsymbol{\theta}} \underset{\substack{(\mathbf{Y}, \mathbf{Z}) \sim p(\mathcal{D}) \\ (\mathrm{t}, 1, \mathbf{h}) \sim p(\mathcal{T} \mid \mathcal{D})}}{\mathbb{E}} \log p\left(\mathbf{Y}_{\mathrm{t}: t+\mathrm{h}} \mid \hat{\boldsymbol{\phi}}\right), \\ & \text { s.t. } \hat{\boldsymbol{\phi}}=f_{\boldsymbol{\theta}}\left(\mathbf{Y}_{\mathbf{t}-1: t}, \mathbf{Z}_{\mathrm{t}-1: \mathbf{t}+\mathrm{h}}\right), \end{aligned}\).
Notation
- (1) Lookback window: \(\boldsymbol{Y}_{t-l: t}=\left(\boldsymbol{y}_{t-l}, \ldots, \boldsymbol{y}_{t-1}\right)\)
- with context length \(l\)
- (2) Forecast horizon: \(\boldsymbol{Y}_{t: t+h}=\left(\boldsymbol{y}_t, \ldots, \boldsymbol{y}_{t+h-1}\right)\)
- with prediction length \(h\)
(1) Architecture
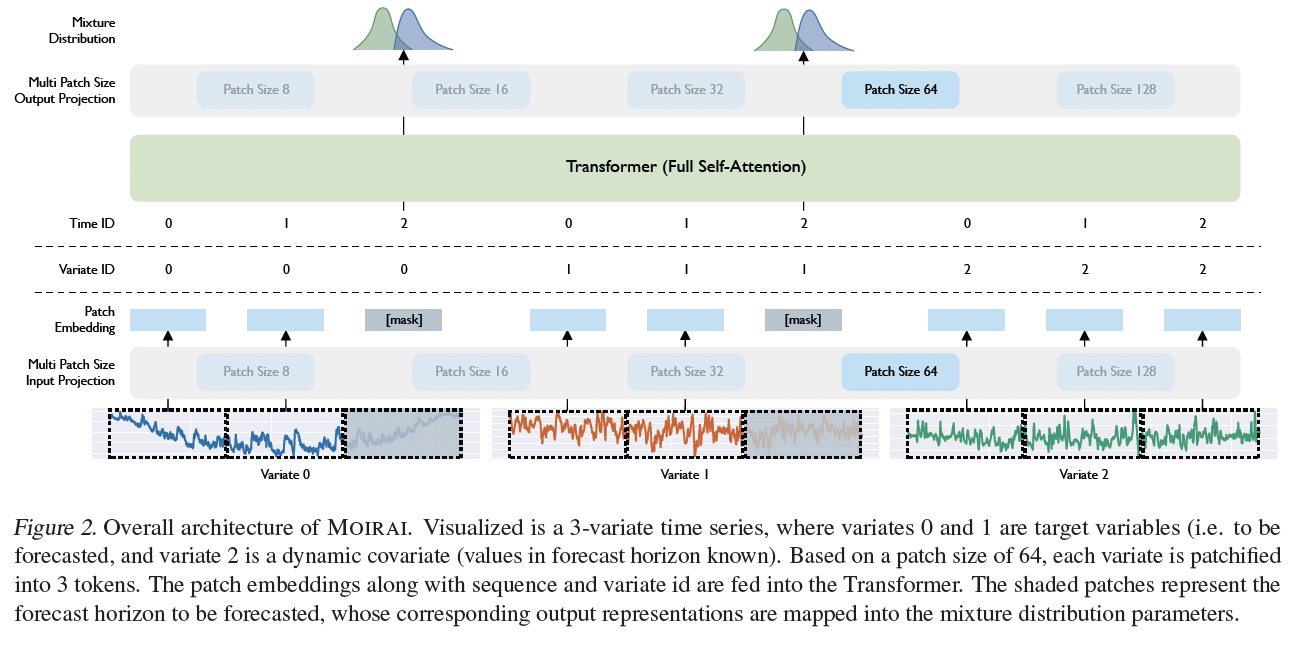
Framework
- (non-overlapping) patch-based approach
- masked encoder architecture
Proposed modifications
- “flatten” MTS: to extend the architecture to the any-variate setting
- consider all variates as a single sequence
Input projection
- projected into vector representations via a multi patch size input projection layer
[mask]
- learnable embedding
- replaces patches falling within the forecast horizon
Output projection
- output tokens are then decoded via the multi patch size output projection into the parameters of the mixture distribution.
Etc
- (non-learnable) instance normalization (Kim et al., 2022)
- encoder-only Transformer architecture
- use pre-normalization (Xiong et al., 2020)
- replace all LayerNorms with RMSNorm (Zhang & Sennrich, 2019),
- query-key normalization (Henry et al., 2020)
- non-linearity in FFN layers: SwiGLU (Shazeer, 2020)
a) Multi Patch Size Projection Layers
Single model should possess the capability to handle TS spanning a wide range of frequencies
If single patch size?
- one-model-per-dataset paradigm :(
Flexible strategy:
- “Larger” patch size to handle high-frequency data
- thereby lower the burden of the quadratic computation cost of attention while maintaining a long context length.
- “Smaller” patch size for low-frequency data
- to transfer computation to the Transformer layers, rather than relying solely on simple linear embedding layers. To implement
\(\rightarrow\) Propose learning “multiple” input and output embedding layers
-
each associated with varying patch sizes
-
only learn one set of projection weights per patch size
- which is shared amongst frequencies if there is an overlap based on the settings.
b) Any-Variate Attention
Universal forecasters: must be equipped to handle arbitrary MTS
Existing TS Transformers (often)
- rely on an independent variate assumption
- limited to a single dimensionality due to embedding layers mapping \(\mathbb{R}^{d_y} \rightarrow \mathbb{R}^{d_h}\),
Solution) By flattening a MTS to consider all variates as a single sequence
- Requires variate encodings
- to enable the model to disambiguate between different variates
- Need to ensure that …
- permutation equivariance w.r.t. variate ordering
- permutation invariance w.r.t. variate indices
Propose Any-variate Attention
\(\rightarrow\) Leverage binary attention biases to encode variate indices.
Attention score \(A_{i j, m n} \in \mathbb{R}\)
- btw the \((i, m)\)-th query & and \((j, n)\)-th key
- \(i\) : time index
- \(m\) : variate index
- \(A_{i j, m n}= \frac{\exp \left\{E_{i j, m n}\right\}}{\sum_{k, o} \exp \left\{E_{i k, m o}\right\}}\).
- \(E_{i j, m n}= \left(\boldsymbol{W}^Q \boldsymbol{x}_{i, m}\right)^T \boldsymbol{R}_{i-j}\left(\boldsymbol{W}^K \boldsymbol{x}_{j, n}\right) +u^{(1)} * \mathbb{1}_{\{m=n\}}+u^{(2)} * \mathbb{1}_{\{m \neq n\}}\).
- \(\boldsymbol{W}^Q \boldsymbol{x}_{i, m} \in \mathbb{R}^{d_h}\): query vectors
- \(\boldsymbol{W}^K \boldsymbol{x}_{j, n} \in \mathbb{R}^{d_h}\): key vectors
- \(\boldsymbol{R}_{i-j} \in \mathbb{R}^{d_h \times d_h}\) : rotary matrix ( \(\mathrm{Su}\) et al., 2024)
- \(u^{(1)}, u^{(2)} \in \mathbb{R}\) : learnable scalars for each head in each layer,
Binary attention bias
- allows for disambiguation between variates via attention scores,
\(\rightarrow\) fulfills permutation equivariance/invariance w.r.t. variate ordering/indices
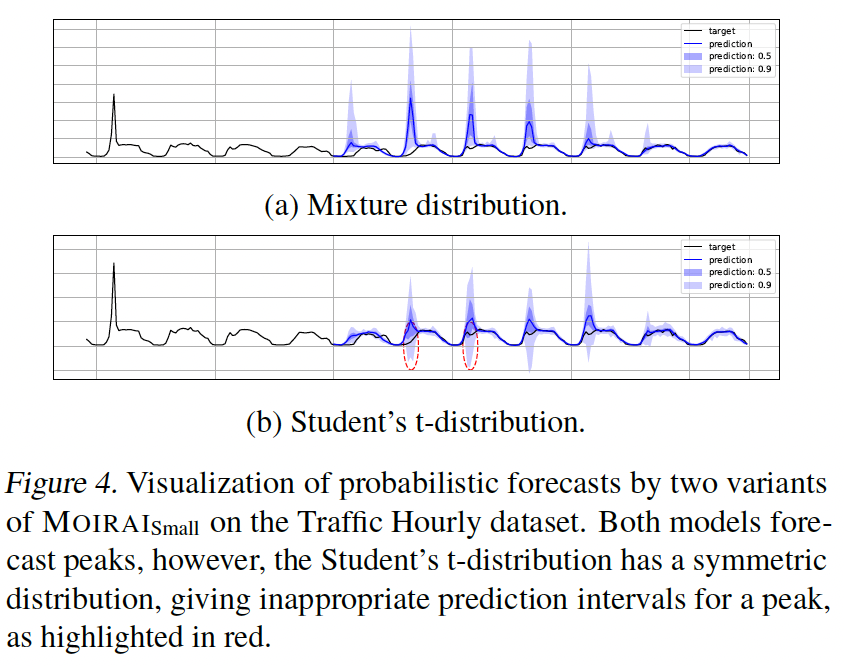
c) Mixture Distribution
Mixture of parametric distributions (of \(c\) components)
- \(p\left(\mathbf{Y}_{t: t+h} \mid \hat{\boldsymbol{\phi}}\right)=\sum_{i=1}^c w_i p_i\left(\mathbf{Y}_{t: t+h} \mid \hat{\phi}_i\right)\).
- where \(\hat{\boldsymbol{\phi}}=\left\{w_1, \hat{\phi}_1, \ldots, w_c, \hat{\boldsymbol{\phi}}_c\right\}\),
- \(p_i\) is the \(i\)-th component’s p.d.f
- where \(\hat{\boldsymbol{\phi}}=\left\{w_1, \hat{\phi}_1, \ldots, w_c, \hat{\boldsymbol{\phi}}_c\right\}\),
Mixture components
- (1) Student’s \(\mathrm{t}\)-distribution
- robust option for general time series
- (2) Negative binomial distribution
- for positive count data
- (3) Log-normal distribution
- to model right-skewed data commonly across economic and and natural phenomena
- (4) Low variance normal distribution
- for high confidence predictions.
(2) Unified Training
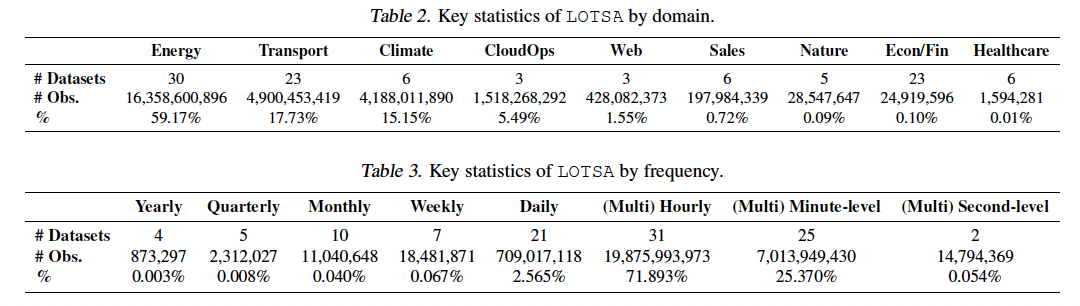
a) LOTSA data
Existing work: relied on three primary sources of data
- (1) Monash Time Series Forecasting Archive (Godahewa et al., 2021)
- (2) GluonTS library (Alexandrov et al., 2020)
- (3) Popular LTSF benchmark (Lai et al., 2018; Wu et al., 2021).
- (4) Das et al. (2023b)
(1) & (2): diverse domains, but constrained in size
-
approximately 1B observations combined
(\(\leftrightarrow\) LLMs are trained on trillions of tokens)
(4) Private dataset based on Google Trends
- but lacks diversity
- similarly sized at 1B observations
\(\rightarrow\) Tackle this issue head-on by building a large-scale archive of open TS datasets by collating publicly available sources of TS datasets.
\(\rightarrow\) Result: LOTSA
- 9 domains
- 27,646,462,733 observations
b) Pre-training
Optimize the mixture distribution log-likelihood
1) Data Distribution
- \[(\mathbf{Y}, \mathbf{Z}) \sim p(\mathcal{D})\]
-
Defines how TS are sampled from the dataset
-
Introduce the notion of sub-datasets
\(p(\mathcal{D})=\) \(p(\mathbf{Y}, \mathbf{Z} \mid \mathbf{D}) p(\mathbf{D})\).
- by decomposing the data distribution into a sub-dataset distribution
- TS distribution conditioned on a sub-dataset
-
Procedure
- Step 1) Sample a sub-dataset from \(p(\mathbf{D})\)
- Step 2) Given that sub-dataset, we sample a TS
Notation
- \(K\) sub-datasets of \(\boldsymbol{D}_k\)
- represents the set of indices of TS belonging to sub-dataset \(k\)
- \(p\left(\boldsymbol{Y}^{(i)}, \boldsymbol{Z}^{(i)} \mid \boldsymbol{D}_k\right)=\frac{T_{i * 1}\left\{i \in \boldsymbol{D}_k\right\}}{\sum_{j \in \boldsymbol{D}_k} T_j}\),
- proportionate to the number of observations
Due to data imbalance …
- avoid sampling sub-datasets proportionately
- instead cap the contribution of each sub-dataset at \(\epsilon=0.001\),
\(\rightarrow\) \(p\left(\boldsymbol{D}_k\right)=\frac{\omega_k}{\sum_{i=1}^K \omega_i}\)
- where \(\omega_k=\frac{\min \left( \mid \boldsymbol{D}_k \mid , \epsilon\right)}{\sum_i^K \mid \boldsymbol{D}_i \mid }\) and \(\mid \boldsymbol{D}_k \mid =\sum_{i \in \boldsymbol{D}_k} T_i\).
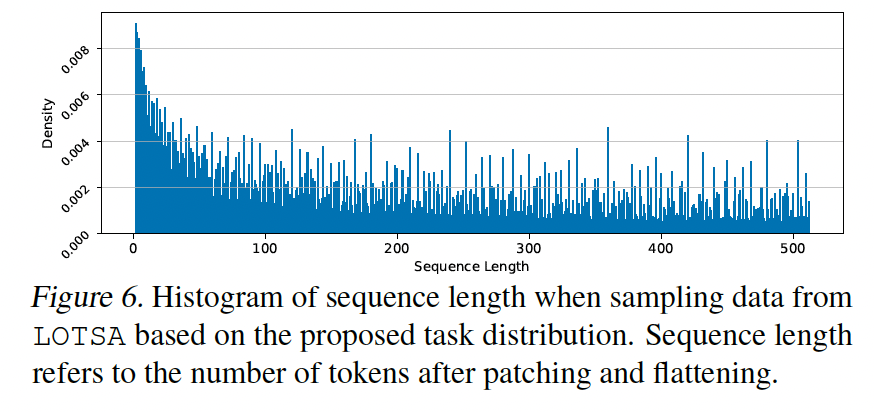
2) Task Distribution
- Fixed context and prediction length (X)
- Sample from a task distribution, \((\mathrm{t}, l, \mathrm{~h}) \sim p(\mathcal{T} \mid \mathcal{D})\)
- In practice, rather than sampling \(t, l, h\), given a TS,
- Step 1) Crop a uniformly sampled window
- whose length is uniformly sampled from a range (2,512)
- Step 2) Split into lookback and horizon segments
- prediction length is uniformly sampled as a proportion (within a range (0.15,0.5))
- Step 3) Further augment training by
- (1) Uniformly subsampling MTS in the variate dimension
- (2) Constructing MTS from sub-datasets with univariate TS
- by randomly concatenating them
- Step 1) Crop a uniformly sampled window
- Etc) # of variates is sampled from a beta-binomial distribution
- maximum of 128 variates, with mean \(\approx 37\)
3) Training
4. Experiments
(1) In-distribution Forecasting
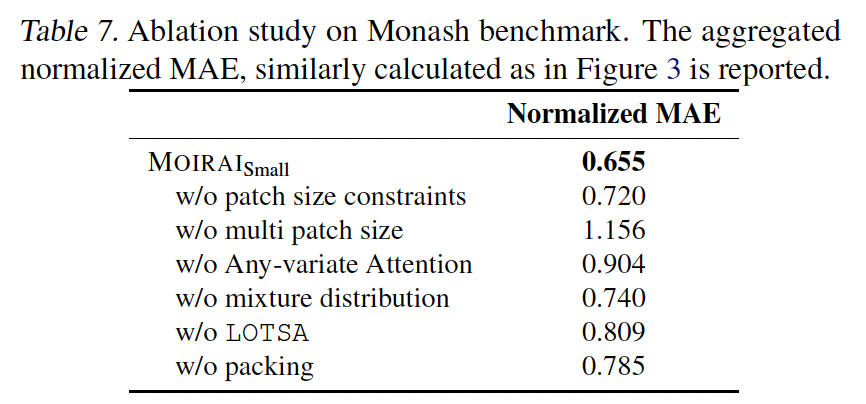
a) Monash benchmark
-
aim to measure generalization capability across diverse domains.
-
(Note that Monash \(\in\) LOTSA )
b) Train & Test
- only include the train set
- holding out the test set
- use for in-distribution evaluation.
c) Setting
-
context length of 1000
-
patch size of 32 for all frequencies,
( except for quarterly data with a patch size of 8 )
d) Result
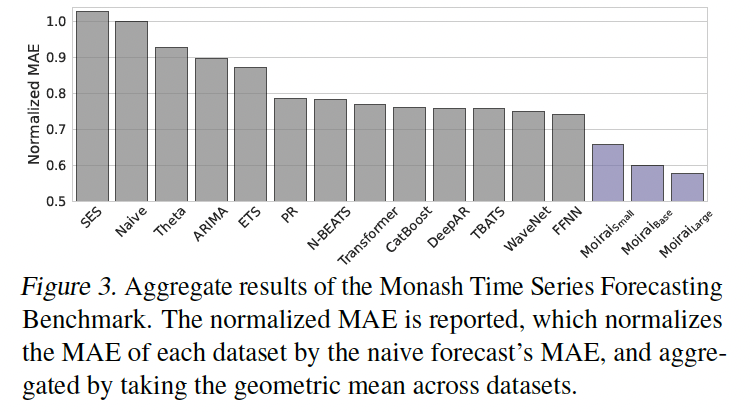
-
Note that each baseline is typically trained individually per dataset or per TS within a dataset!!
(\(\leftrightarrow\) MOIRAIA: single model)
(2) OOD / Zero-Shot Forecasting
a) Unseen target datasets
Most universal forecasters:
- currently do not yet have open weights avaiable for evaluation.
Problem of comparing zero-shot methods
- not having a standard held-out test split
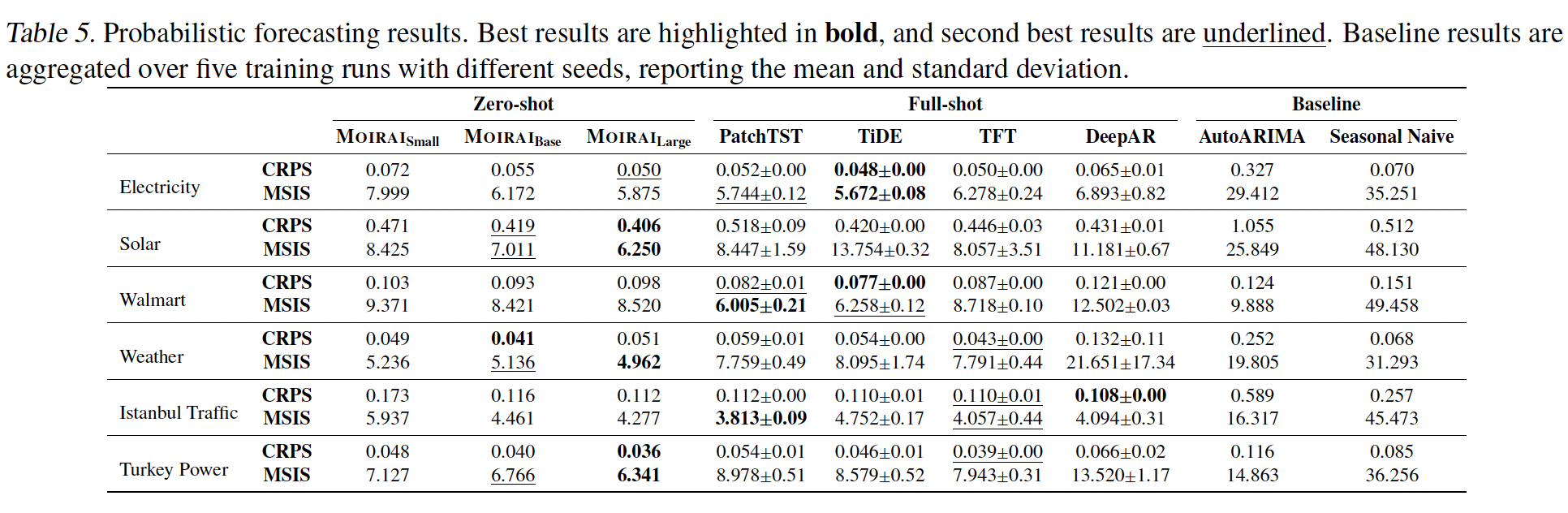
b) Probabilistic Forecasting
- Evaluate on seven datasets
- Rolling evaluation setup with stride equal to prediction length.
- defined for each dataset based on frequency.
-
Metric: CRPS & Mean Scaled Interval Score (MSIS)
- For each dataset and baseline, we perform hyperparameter tuning on a validation CRPS, and report results averaged over five training runs with different seeds.
For MOIRAI, perform…
-
(1) Inference time tuning
-
(2) Selecting
- context length from {1000, 2000, 3000, 4000, 5000}
- and patch sizes based on frequency
on the validation CRPS.
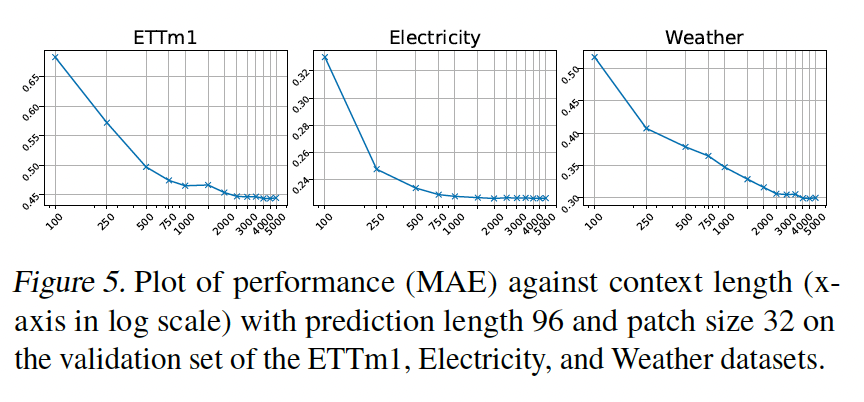
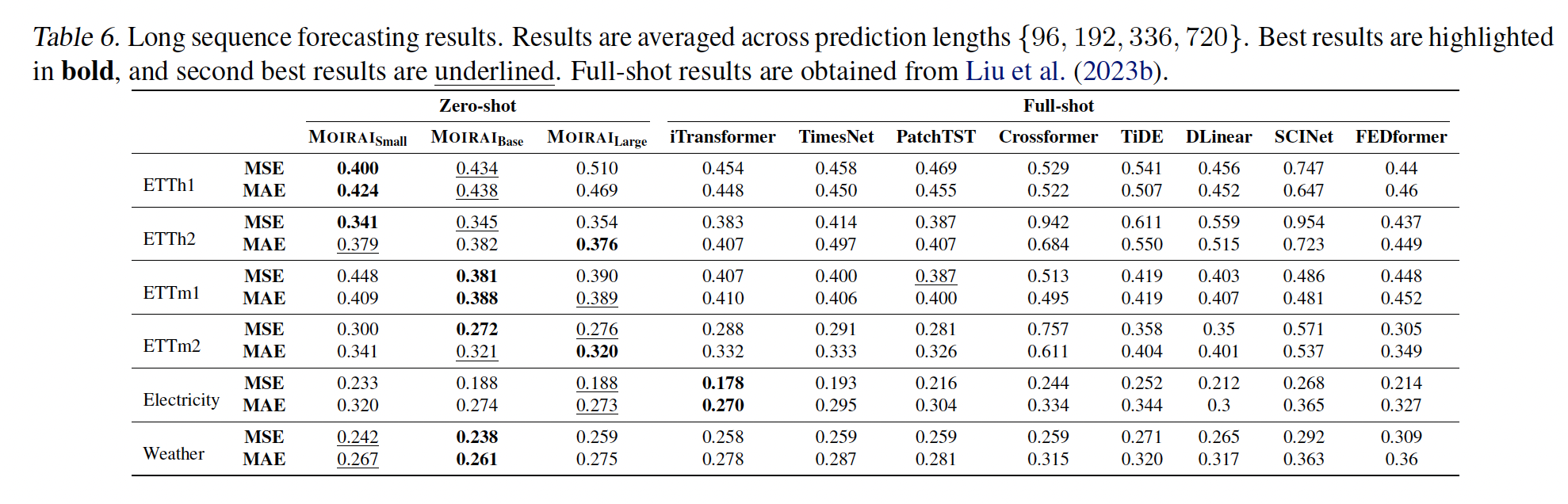
c) Long Sequence Forecasting
(3) Ablation Study