
Deep and Confident Prediction for Time Series at Uber (2017)
Contents
- Abstract
- Introduction
- Related Works
- BNN
- Method
- Prediction Uncertainty
- Model Design
0. Abstract
Reliable Uncertainty Estimation
- propose a novel end-to-end Bayesian Deep Model
1. Introduction
estimating uncertainty in TS prediction!
quantify the prediction uncertainty, using BNN, which is further used for large-scale anomaly detection
Prediction Uncertainty
- 1) model uncertainty ( = epistemic uncertainty )
- can be reduced, as more samples being collected
- 2) inherent noise
- captures the uncertainty in the data generation process
- 3) model misspecification
- test data distn \(\neq\) train data distn
Propose a principled solution to incorporate this uncertainty using an encoder-decoder framework
Contributions (Summary)
- generic & scalable uncertainty estimation implementation
- quantifies the prediction uncertainty from 3 sources
- motivates a real-world anomaly detection
2. Related Works
2-1. BNN
this paper is inspired by MCDO (Monte Carlo Drop Out)
- stochastic dropouts are applied after each hidden layer
- model output = random sample, generated from posterior predictive distn
- model uncertainty can be estimated by sample variance of the model prediction
3. Method
trained NN : \(f^{\hat{W}}(\cdot)\)
new sample : \(x^{*}\)
\(\rightarrow\) goal : evaluate the uncertainty of the model prediction, \(\hat{y}^{*}=f^{\hat{W}}\left(x^{*}\right) .\)
quantify the prediction standard error, \(\eta\),
so that an approximate \(\alpha\)-level prediction interval = \(\left[\hat{y}^{*}-z_{\alpha / 2} \eta, \hat{y}^{*}+z_{\alpha / 2} \eta\right]\).
(1) Prediction Uncertainty
-
NN : \(f^{W}(\cdot)\)…. gaussian prior : \(W \sim N(0, I)\)
-
data generating distribution : \(p\left(y \mid f^{W}(x)\right)\)
- ex) for regression : \(y \mid W \sim N\left(f^{W}(x), \sigma^{2}\right)\)
-
dataset
- set of \(N\) observations \(X=\left\{x_{1}, \ldots, x_{N}\right\}\) and \(Y=\left\{y_{1}, \ldots, y_{N}\right\}\)
-
Bayesian inference : finding the posterior distribution over model parameters \(p(W \mid X, Y)\).
-
prediction distribution :
- obtained by marginalizing out the posterior distribution
- \(p\left(y^{*} \mid x^{*}\right)=\int_{W} p\left(y^{*} \mid f^{W}\left(x^{*}\right)\right) p(W \mid X, Y) d W\).
-
variance of the prediction distn
-
decomposed into…
\(\begin{aligned} \operatorname{Var}\left(y^{*} \mid x^{*}\right) &=\operatorname{Var}\left[\mathbb{E}\left(y^{*} \mid W, x^{*}\right)\right]+\mathbb{E}\left[\operatorname{Var}\left(y^{*} \mid W, x^{*}\right)\right] \\ &=\operatorname{Var}\left(f^{W}\left(x^{*}\right)\right)+\sigma^{2} \end{aligned}\).
-
2 terms :
- 1) \(\operatorname{Var}\left(f^{W}\left(x^{*}\right)\right)\) : model uncertainty
- 2) \(\sigma^{2}\) : inherent noise
-
-
this paper considers COMBINATION of 3 SOURCES
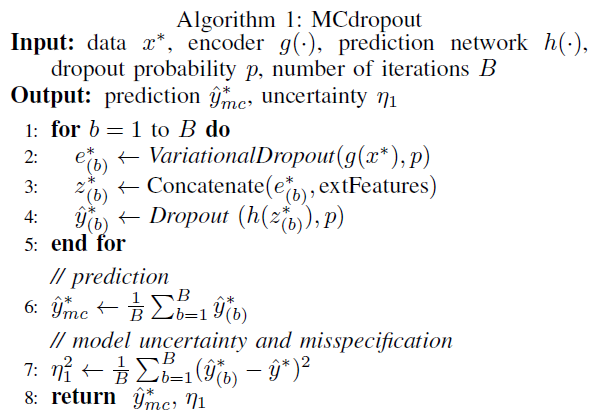
(a) Model Uncertainty
-
stochastic dropouts at each layer
-
randomly dropout each hidden unit with certain probability \(p\)
-
stochastic feedforward is repeated \(B\) times \(\rightarrow\) \(\left\{\hat{y}_{(1)}^{*}, \ldots, \hat{y}_{(B)}^{*}\right\}\).
-
Model uncertainty : can be approximated by the sample variance
-
\(\widehat{\operatorname{Var}}\left(f^{W}\left(x^{*}\right)\right)=\frac{1}{B} \sum_{b=1}^{B}\left(\hat{y}_{(b)}^{*}-\overline{\hat{y}}^{*}\right)^{2}\).
where \(\overline{\hat{y}}^{*}=\frac{1}{B} \sum_{b=1}^{B} \hat{y}_{(b)}^{*} \quad[13]\)
-
(b) Model misspecification
- use encoder & decoder
- [idea] train an encoder that extracts the representative features from a time series & decode it
-
measure the distance between test cases & training samples in the embedded space
- How to incorporate this uncertainty in variance calculation?
- connecting encoder \(g(\cdot)\) with prediction network \(h(\cdot)\)
- treat them as one network ( \(f = h(g(\cdot))\) )
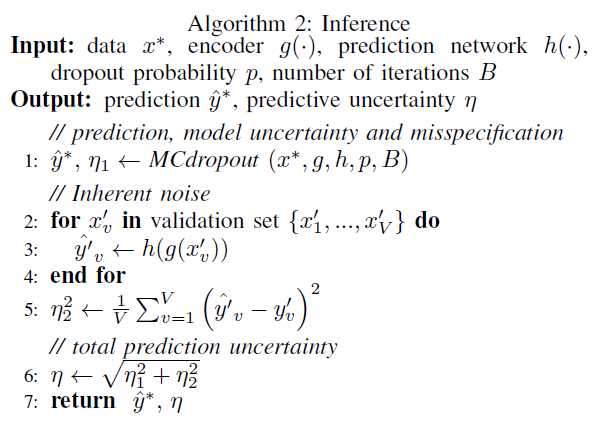
(c) Inherent noise
-
inherent noise level = \(\sigma^2\)
-
propose a simple & adaptive approach, that estimates the noise level
via the sum of squares, evaluated on an independent HELD-OUT VALIDATION set
( \(X^{\prime}=\left\{x_{1}^{\prime}, \ldots, x_{V}^{\prime}\right\}, Y^{\prime}=\left\{y_{1}^{\prime}, \ldots, y_{V}^{\prime}\right\}\) )
-
estimate \(\sigma^{2}\) via \(\hat{\sigma}^{2}=\frac{1}{V} \sum_{v=1}^{V}\left(y_{v}^{\prime}-f^{\hat{W}}\left(x_{v}^{\prime}\right)\right)^{2}\)
Final inference algorithm :
- combine inherent noise estimation with MC dropout
(2) Model Design
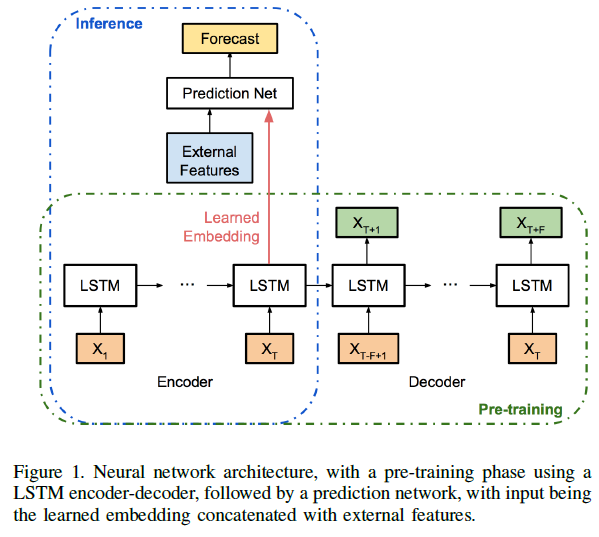
- part 1) encoder-decoder framework
- part 2) prediction network
(a) Encoder-decoder
conduct a pre-training step to fit an encoder ( = 2-layer LSTM )
Notation
- univariate time series \(\left\{x_{t}\right\}_{t}\)
- encoder reads in the first \(T\) timestamps \(\left\{x_{1}, \ldots, x_{T}\right\}\)
- decoder constructs the following \(F\) timestamps \(\left\{x_{T+1}, \ldots, x_{T+F}\right\}\) with guidance from \(\left\{x_{T-F+1}, \ldots, x_{T}\right\}\)
(b) Prediction network
when external features are available
\(\rightarrow\) concatenated to the embedding vector
(c) Inference
inference stage involves only encoder & prediction network
prediction uncertainty \(\eta\) contains 2 terms
- 1) model uncertainty & misspecification uncertainty
- 2) inherent noise
Finally, approximate \(\alpha\) level prediction interval is constructed!
\(\left[\hat{y}^{*}-z_{\alpha / 2} \eta, \hat{y}^{*}+z_{\alpha / 2} \eta\right]\).