
Temporal Latent Auto-Encoder ; A Method for Probabilistic Multivariate Time Series Forecasting (2021)
Contents
-
Abstract
-
Introduction
-
Problem Setup & Methodology
- Point Prediction
- Probabilistic Prediction
0. Abstract
Probabilistic Forecasting of high-dim MTS : 어렵다!
기존 연구 방향
- 1) simple distribution assumption
- 2) cross-series correlation 고려 X
Propose a novel “temporal latent auto-encoder”
- “non-linear” factorization of MTS
- end-to-end
1. Introduction
Forecasting in multivariate settings
-
방법 1) 모든 time-series를 예측하는 1개의 multi-output model
-
방법 2) 모든 time-series를 각각의 모델로 fitting 시키기 ( separate model )
\(\rightarrow\) 문제점 : unable to model “cross-series” correlation
-
해결책 : factorization 사용하자!
- relationships between time series are factorized into a low rank matrix
( each time series = linear combination of a smaller set of latent/basis time series )
DeepGLO
- enable non-linear latent space forecast models
- iteratively alternates between
- 1) linear matrix factorization
- 2) fitting a latent space TCN (Temporal CNN)
- forecasts from this model are then fed as covariates to a separately trained multi-task univariate TCN model
Key Limitations of DeepGLO
- series 사이의 non-linear relationship는 포착 불가
- end-to-end가 아님
- probabilistic output이 아님
- limited to capture “stationary” relationships between time series
TLAE (Temporal Latent Autoencoder)
- enbales “non-linear” transforms of input series
- end-to-end
- infers joint predictive distribution
2. Problem Setup & Methodology
Notation
- multivariate ts : bold CAPITAL letter
- univariate ts : bold LOWERCASE letter
- ts data : \(\mathbf{X}\)
- \(\mathbf{x}_{i}\) : \(i\) -th column
- \(x_{i, j}\) : \((i, j)\)-th entry of \(\mathbf{X}\)
- \(\mid \mid \mathbf{X} \mid \mid _{\ell_{2}}\) : matrix Frobenius norm
- \(\mid \mid \mathrm{x} \mid \mid _{\ell_{p}}\) : \(\ell_{p}\) -norm of the vector \(\mathrm{x}\) ( = \(\left(\sum_{i} x_{i}^{p}\right)^{1 / p}\) )
-
\[\mathbf{Y} \in \mathbb{R}^{n \times T}\]
- \(\mathbf{Y}_{B}\) : sub-matrix of \(\mathrm{Y}\) with column indices in \(B\).
- \(\mid \mathcal{B} \mid\) : cardinality of this set
Problem definition
-
collection of high-dim multivariate time series : \(\left(\mathbf{y}_{1}, \ldots, \mathbf{y}_{T}\right)\)
-
problem of forecasting \(\tau\) future values : \(\left(\mathbf{y}_{T+1}, \ldots, \mathbf{y}_{T+\tau}\right)\)
( given \(\left\{\mathbf{y}_{i}\right\}_{i=1}^{T}\) )
-
decomposition : \(p\left(\mathbf{y}_{T+1}, \ldots, \mathbf{y}_{T+\tau} \mid \mathbf{y}_{1: T}\right)=\prod_{i=1}^{\tau} p\left(\mathbf{y}_{T+i} \mid \mathbf{y}_{1: T+i-1}\right)\) 풀기
(1) Point Prediction
Motivation
- TRMF (Temporal Regularized Matrix Factorization) : decomposes MTS ( = \(\mathbf{Y} \in \mathbb{R}^{n \times T}\) ) with
- (1) \(\mathbf{F} \in \mathbb{R}^{n \times d}\)
- (2) \(\mathbf{X} \in \mathbb{R}^{d \times T}\)………. imposing temporal constraints
- 만약 \(\mathbf{Y}\)가 few time series in \(\mathbf{X}\)로 잘 대변된다면, 더 low-dimension으로도 축소 가능!
RNN과 같은 (temporal DNN) 모델들을 학습시키기 위해, data는 temporally하게 batch로 나눠진다.
-
\(\mathbf{Y}_{B}\) : a batch of data containing a subset of \(b\) time samples
( \(\mathbf{Y}_{B}=\left[\mathbf{y}_{t}, \mathbf{y}_{t+1}, \ldots, \mathbf{y}_{t+b-1}\right]\) where \(B=\) \(\{t, \ldots, t+b-1\}\) are time indices )
constrained factorization 풀기
-
\(\min _{\mathbf{X}, \mathbf{F}, \mathbf{W}} \mathcal{L}(\mathbf{X}, \mathbf{F}, \mathbf{W})=\frac{1}{ \mid \mathcal{B} \mid } \sum_{B \in \mathcal{B}} \mathcal{L}_{B}\left(\mathbf{X}_{B}, \mathbf{F}, \mathbf{W}\right)\).
where \(\mathcal{B}\) is the set of all data batches
-
each batch loss :
\(\mathcal{L}_{B}\left(\mathbf{X}_{B}, \mathbf{F}, \mathbf{W}\right) \triangleq \frac{1}{n b} \mid \mid \mathbf{Y}_{B}-\mathbf{F} \mathbf{X}_{B} \mid \mid _{\ell_{2}}^{2}+\lambda \mathcal{R}\left(\mathbf{X}_{B} ; \mathbf{W}\right)\).
- \(\mathcal{R}\left(\mathbf{X}_{B} ; \mathbf{W}\right)\) : regularization parameterized
-
temporal constraint 위해… autoregressive model on \(\mathbf{X}_{B}\)
- \(\mathbf{x}_{\ell}=\sum_{j=1}^{L} \mathbf{W}^{(j)} \mathbf{x}_{\ell-j}\). ( \(L\) : predefined lag parameter )
-
Regularization :
- (기본) \(\mathcal{R}\left(\mathbf{X}_{B} ; \mathbf{W}\right) \triangleq \sum_{\ell=L+1}^{b} \mid \mid \mathbf{x}_{\ell}-\sum_{j=1}^{L} \mathbf{W}^{(j)} \mathbf{x}_{\ell-j} \mid \mid _{\ell_{2}}^{2}\).
- (TCN) \(\mathcal{R}\left(\mathbf{X}_{B} ; \mathbf{W}\right) \triangleq \sum_{\ell=L+1}^{b} \mid \mid \mathbf{x}_{\ell}-\operatorname{TCN}\left(\mathbf{x}_{\ell-L, \ldots, \mathbf{x}_{\ell-1}} ; \mathbf{W}\right) \mid \mid _{\ell_{2}}^{2}\)
Our Model
if \(\mathrm{Y}\) can be decomposed by \(\mathbf{F}\) and \(\mathbf{X}\)…
- \(\mathbf{X}=\mathbf{F}^{+} \mathbf{Y}\) where \(\mathbf{F}^{+}\) is the pseudo-inverse of \(\mathbf{F}\)
- \(\mathbf{Y}=\mathbf{F F}^{+} \mathbf{Y}\).
if \(\mathbf{F}^{+}\) can be replaced by an encoder and \(\mathbf{F}\) by a decoder…
\(\rightarrow\) exploit the ideas of AE
- Latent representation : \(\mathbf{X}=g_{\phi}(\mathbf{Y})\)
- reconstruction of \(\mathbf{Y}\) : \(\hat{\mathbf{Y}}=f_{\boldsymbol{\theta}}(\mathbf{X})\)
LSTM network
-
enc & dec 사이에 temporal structure of the latent representation를 잡을 수 있는 layer를 넣음
-
encode long-range dependency of latent variables
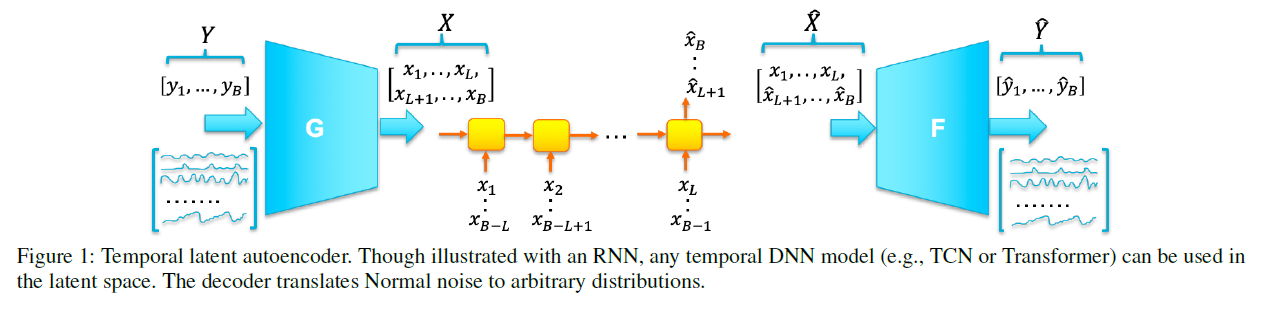
Flow
-
1) a batch of the time series \(\mathbf{Y}_{B}=\left[\mathbf{y}_{1}, \ldots, \mathbf{y}_{b}\right] \in \mathbb{R}^{n \times b}\) is
embedded into the latent variables \(\mathbf{X}_{B}=\left[\mathbf{x}_{1}, \ldots, \mathbf{x}_{b}\right] \in \mathbb{R}^{d \times b}\)
-
2) These sequential ordered \(\mathrm{x}_{i}\) are input to the LSTM to produce outputs \(\hat{\mathbf{x}}_{L+1}, \ldots, \hat{\mathbf{x}}_{b}\)
with each \(\hat{\mathbf{x}}_{i+1}= h_{\mathrm{W}}\left(\mathrm{x}_{i-L+1}, \ldots, \mathrm{x}_{i}\right)\)
-
3) decoder will take the matrix \(\hat{\mathbf{X}}_{B}\) consisting of variables \(\mathrm{x}_{1}, \ldots, \mathrm{x}_{L}\) and \(\hat{\mathrm{x}}_{L+1}, \ldots, \hat{\mathrm{x}}_{b}\) as input
and yield \(\hat{\mathbf{Y}}_{B}\)
batch output \(\hat{Y}_{B}\) contains two components
- 1) \(\hat{\mathbf{y}}_{i}\) with \(i=1, \ldots, L\)
- directly transferred from the encoder without passing through the middle layer
- \(\hat{\mathbf{y}}_{i}=f_{\boldsymbol{\theta}} \circ g_{\boldsymbol{\phi}}\left(\mathbf{y}_{i}\right)\).
- 2) \(\hat{\mathbf{y}}_{i}\) with \(i=L+1, \ldots, b\)
- function of the past input
- \(\hat{\mathbf{y}}_{i+1}=f_{\boldsymbol{\theta}} \circ h_{\mathbf{W}} \circ g_{\boldsymbol{\phi}}\left(\mathbf{y}_{i-L+1}, \ldots, \mathbf{y}_{i}\right)\).
- minimize \(\mid \mid \hat{\mathbf{y}}_{i}-\mathbf{y}_{i} \mid \mid _{\ell_{p}}^{p}\)
Objective function w.r.t batch of data :
- \(\mathcal{L}_{B}(\mathbf{W}, \boldsymbol{\phi}, \boldsymbol{\theta}) \triangleq \frac{1}{n b} \mid \mid \mathbf{Y}_{B}-\hat{\mathbf{Y}}_{B} \mid \mid _{\ell_{p}}^{p} +\lambda \frac{1}{d(b-L)} \sum_{i=L}^{b-1} \mid \mid \mathbf{x}_{i+1}-h_{\mathbf{W}}\left(\mathbf{x}_{i-L+1}, \ldots, \mathbf{x}_{i}\right) \mid \mid _{\ell_{q}}^{q}\).
Overall Loss Function :
- \(\min _{\mathbf{W}, \phi, \theta} \mathcal{L}(\mathbf{W}, \phi, \boldsymbol{\theta})=\frac{1}{ \mid \mathcal{B} \mid } \sum_{B \in \mathcal{B}} \mathcal{L}_{B}(\mathbf{W}, \phi, \boldsymbol{\theta})\).
Interpretation
-
\(\mathbf{Y}\) & \(\hat{\mathbf{Y}}\) 가깝도록 :
capture the correlation cross time series and encode this global info into few latent variables \(\mathbf{X}\)
-
\(\hat{\mathbf{X}}\) & \(\mathbf{X}\) 가깝도록 :
capture temporal dependency and provide the predictive capability of the latent representation
(2) Probabilistic prediction
input space를 direct하게 모델링하지 않고,
encode high-dim data to low-dim embedding
\(\rightarrow\) 이 과정에서 probabilistic model을 사용
- \(\boldsymbol{\mu}_{i}=h_{\mathbf{W}}^{(1)}\left(\mathbf{x}_{1}, \ldots, \mathbf{x}_{i}\right)\) and \(\boldsymbol{\sigma}_{i}^{2}=h_{\mathbf{W}}^{(2)}\left(\mathbf{x}_{1}, \ldots, \mathbf{x}_{i}\right)\)
Objective function \(\mathcal{L}_{B}(\phi, \theta, \mathbf{W})\)
- weighted combination of the reconstruction loss and the negative log likelihood loss
-
\(\frac{1}{n b} \mid \mid \hat{\mathbf{Y}}_{B}-\mathbf{Y}_{B} \mid \mid _{\ell_{p}}^{p}-\lambda \frac{1}{b-L} \sum_{i=L+1}^{b} \log \mathcal{N}\left(\mathbf{x}_{i} ; \boldsymbol{\mu}_{i-1}, \boldsymbol{\sigma}_{i-1}^{2}\right)\).
-
VAE와 유사한 꼴
- 1) data reconstruction loss
- 2) KL-divergence loss ( encourage latent distn to be close to standard Gaussian )
-
VAE와의 차이점 :
our model has a temporal model in the “latent space” & measure a “conditional discrepancy”