Regular Time-series Generation using SGM
Contents
- Abstract
- Introduction
- Related Work & Preliminaries
- Score-based Generative Models
- Time-series Generation and SGMs
- Proposed Methods: TSGM
Abstract
Score-based generative models (SGMs)
\(\rightarrow\) apply SGMs to synthesize TS data by learning conditional score functions
TSGM
-
Propose a conditional score network for the TS generation domain
-
Derive the loss function between the
- score matching
- denoising score matching
in the TS generation domain
1. Introduction
\(\left\{\left(\mathbf{x}_i, t_i\right)\right\}_{i=1}^N\) : TS of \(N\) observations
\(\rightarrow\) In many cases, TS are incomplete and/or the number of samples is insufficient
\(\rightarrow\) Time Series Generation
There is no research using SGMs to generate TS
- only in forecasting & imputation
\(\rightarrow\) propose TSGM
TSGM
-
First conditional score network on TS generation
- learns the gradient of the conditional \(\log\)-likelihood w.r.t time
-
Design a denoising score matching on TS generation
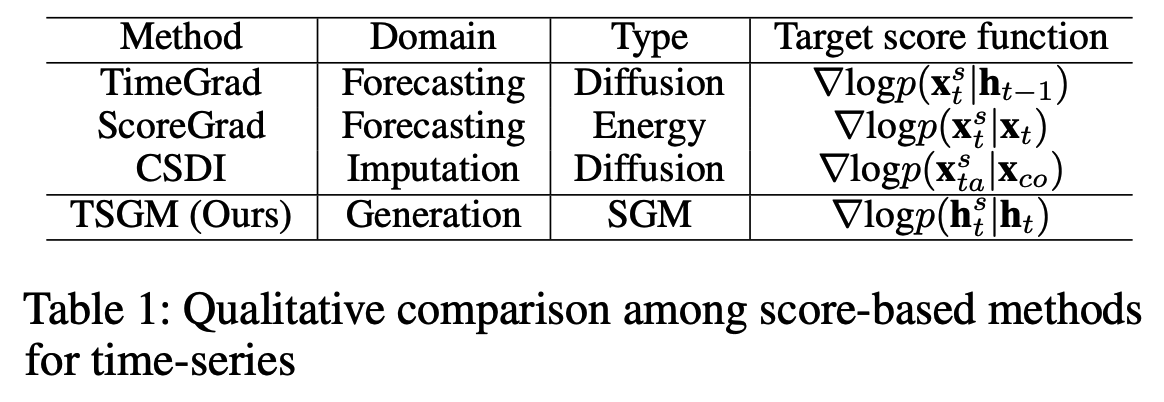
- existing SGM-based TS forecasting and imputation methods also have their own denoising score matching definitions (Table. 1)
-
TSGM can be further categorized into 2 types:
( depending on the used stochastic differential equation type )
- vP & subVP
-
Experiments with …
- 5 real-world datasets
- 2 key evaluation metrics
2. Related Work & Preliminaries
(1) Score-based Generative Models
Adavantages
- generation quality
- computing exact log-likelihood
- controllable generation without extra training
Applications in various domains
- voice synthesis (Mittal et al. 2021)
- medical image process (Song et al. 2022)
Two procedures
Step 1) Add Gaussian noises into a sample ( = forward )
Step 2) Remove the added noises to recover new sample ( =reverse )
[Forward]
Add noises with the following stochastic differential equation (SDE)
\(d \mathbf{x}^s=\mathbf{f}\left(s, \mathbf{x}^s\right) d s+g(s) d \mathbf{w}, \quad s \in[0,1]\).
- \(\mathbf{w} \in \mathbb{R}^n\) is \(n\) dimensional Brownian motion
- \(\mathbf{f}(s, \cdot)\) : \(\mathbb{R}^n \rightarrow \mathbb{R}^n\) is vector-valued drift term
- \(g:[0,1] \rightarrow \mathbb{R}\) is scalar-valued diffusion functions
- \(\mathbf{x}^s\) is a noisy sample diffused at time \(s \in[0,1]\) from an original sample \(\mathbf{x} \in \mathbb{R}^n\).
Details
- \(\mathbf{x}^s\) can be understood as a stochastic process following the SDE
- Several options for f and \(g\) :
- variance exploding(VE)
- variance preserving(VP)
- subVP
- run the forward SDE with sufficiently large \(N\) steps
- score network \(M_\theta\left(s, \mathbf{x}^s\right)\) learns \(\nabla_{\mathbf{x}^s} \log p\left(\mathbf{x}^s\right)\)
[Backward]
For each forward SDE from \(s=0\) to 1,
(Anderson 1982) proved that there exists the following corresponding reverse SDE
\(d \mathbf{x}^s=\left[\mathbf{f}\left(s, \mathbf{x}^s\right)-g^2(s) \nabla_{\mathbf{x}^s} \log p\left(\mathbf{x}^s\right)\right] d s+g(s) d \overline{\mathbf{w}}\).
- if knowing the score function, \(\nabla_{\mathbf{x}^s} \log p\left(\mathbf{x}^s\right)\), we can recover real samples from the prior!
[Training and Sampling]
Loss function:
\(L(\theta)=\mathbb{E}_s\left\{\lambda(s) \mathbb{E}_{\mathbf{x}^s}\left[ \mid \mid M_\theta\left(s, \mathbf{x}^s\right)-\nabla_{\mathbf{x}^s} \log p\left(\mathbf{x}^s\right) \mid \mid _2^2\right]\right\}\).
- \(s\) : uniformly sampled over \([0,1]\)
- Appropriate weight function \(\lambda(s):[0,1] \rightarrow \mathbb{R}\).
Problem: we do not know the exact gradient of the log-likelihood
\(\rightarrow\) Denoising score matching loss
\(L^*(\theta)=\mathbb{E}_s\left\{\lambda(s) \mathbb{E}_{\mathbf{x}^0} \mathbb{E}_{\mathbf{x}^s \mid \mathbf{x}^0}\left[ \mid \mid M_\theta\left(s, \mathbf{x}^s\right)-\nabla_{\mathbf{x}^s} \log p\left(\mathbf{x}^s \mid \mathbf{x}^0\right) \mid \mid _2^2\right]\right\}\).
-
SGMs use an affine drift term
\(\rightarrow\) the transition kernel \(\mathrm{p}\left(\mathbf{x}^s \mid \mathbf{x}^0\right)\) follows a certain Gaussian distribution
\(\rightarrow \therefore\) \(\nabla_{\mathbf{x}^s} \log p\left(\mathbf{x}^s \mid \mathbf{x}^0\right)\) can be analytically calculated.
(2) Time-series Generation and SGMs
[TS Generation]
-
Must generate each observation \(\mathbf{x}_t\) at time \(t \in[2: T]\) considering its previous history \(\mathbf{x}_{1: t-1}\).
-
Train a NN to learn the conditional likelihood \(\mathrm{p}\left(\mathbf{x}_t \mid \mathbf{x}_{1: t-1}\right)\)
& Generate each \(\mathbf{x}_t\) recursively using it
TimeVAE (Desai et al. 2021)
- Provide interpretable results by reflecting temporal structures ( trend and seasonality )
TimeGAN (Yoon, Jarrett, and van der Schaar 2019)
- Encoder & Decoder (RNN based)
- Encoder: trasnform a TS sample \(\mathbf{x}_{1: T}\) into latent vectors \(\mathbf{h}_{1: T}\)
- Decoder: recover them
- Due to RNN… can efficiently learn \(p\left(\mathbf{x}_t \mid \mathbf{x}_{1: t-1}\right)\) by treating it as \(p\left(\mathbf{h}_t \mid \mathbf{h}_{t-1}\right)\)
- Generator & Discriminator
- Minimize discrepancy between \(p\left(\mathbf{x}_t \mid \mathbf{x}_{1: t-1}\right)\) and synthesized \(\hat{p}\left(\mathbf{x}_t \mid \mathbf{x}_{1: t-1}\right)\).
- Limitation:
- GAN: vulnerable to mode collapse and unstable behavior problems during training
[SGMs on Time-series]
a) TimeGrad (Rasul et al. 2021)
- for time-series forecasting
- diffusion model ( = discrete version of SGMs )
- Loss: \(\sum_{t=t_0}^T-\log p_\theta\left(\mathbf{x}_t \mid \mathbf{x}_{1: t-1}, \mathbf{c}_{1: T}\right)\).
- \(\mathbf{c}_{1: T}\) : the covariates of \(\mathbf{x}_{1: T}\).
- by using an RNN encoder, \(\left(\mathbf{x}_{1: t}, \mathbf{c}_{1: T}\right)\) can be encoded into \(\mathbf{h}_t\).
- Sampling: forecasts future observations recursively
In the perspective of SGMs, TimeGrad and ScoreGrad can be regarded as methods to train the following conditional score network \(M\)
\(\sum_{t=t_0}^T \mathbb{E}_s \mathbb{E}_{\mathbf{x}_t^s} \mid \mid M_\theta\left(s, \mathbf{x}_t^s, \mathbf{h}_{t-1}\right)-\nabla_{\mathbf{x}_t^s} \log p\left(\mathbf{x}_t^s \mid \mathbf{h}_{t-1}\right) \mid \mid _2^2\).
b) ScoreGrad (Yan et al. 2021)
-
for time-series forecasting
-
energy-based generative method
( generalizes diffusion models into the energy-based field )
-
Loss: \(\sum_{t=t_0}^T \mathbb{E}_s \mathbb{E}_{\mathbf{x}_t} \mathbb{E}_{\mathbf{x}_t^s \mid \mathbf{x}_t} \mid \mid M_\theta\left(s, \mathbf{x}_t^s, \mathbf{x}_{1: t-1}\right)-\nabla_{\mathbf{x}_t^s} \log p\left(\mathbf{x}_t^s \mid \mathbf{x}_t\right) \mid \mid _2^2\).
c) CSDI (Tashiro et al. 2021)
-
for time-series imputation
( not only imputation, but also forecasting and interpolations )
- reconstructs an entire sequence at once, not recursively
- Loss: \(\mathbb{E}_s \mathbb{E}_{\mathbf{x}_{t a}^s} \mid \mid M_\theta\left(s, \mathbf{x}_{t a}^s, \mathbf{x}_{c o}\right)-\nabla \log p\left(\mathbf{x}_{t a}^s \mid \mathbf{x}_{c o}\right) \mid \mid _2^2\).
- where \(\mathbf{x}_{c o}\) and \(\mathbf{x}_{t a}\) are conditions and imputation targets
Proposed TSGM
Above methods are not suitable for our generative task
- due to the fundamental mismatch between their score function definitions and generation task (Table 1)
Propose to optimize a conditional score network, by using the following denoising score matching:
- \(\mathbb{E}_s \mathbb{E}_{\mathbf{h}_{1: T}} \sum_{t=1}^T \mid \mid M_\theta\left(s, \mathbf{h}_t^s, \mathbf{h}_{t-1}\right)-\nabla_{\mathbf{h}_t^s} \log p\left(\mathbf{h}_t^s \mid \mathbf{h}_t\right) \mid \mid _2^2\).
3. Proposed Methods: TSGM
Consists of three networks:
- (1) Encoder
- (2) Decode
- (3) Conditional score network
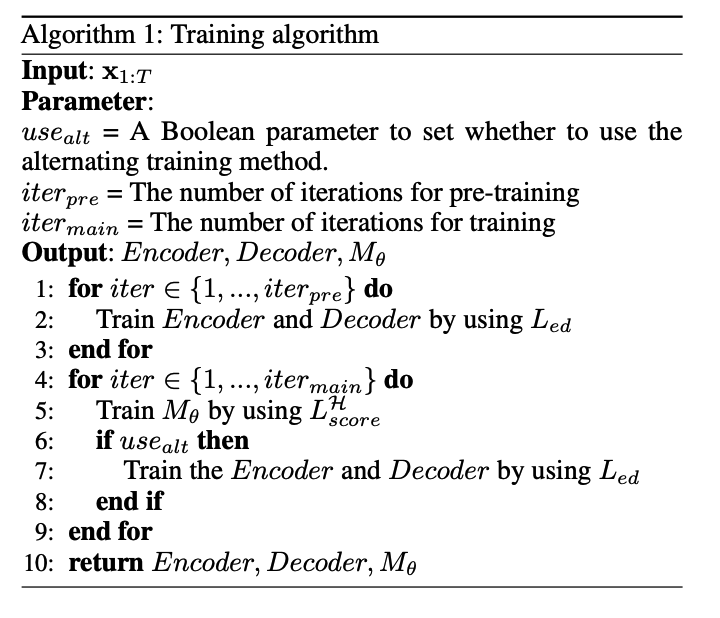
Procedures
-
Step 1) Pre-train the encoder and the decoder
-
Step 2) Using the pre-trained encoder and decoder, we train the conditional score network
- will be used for sampling fake time-series.
(1) Encoder and Decoder
Notation
- \(\mathcal{X}\) and \(\mathcal{H}\) denote a data space and a latent space
- \(e\) and \(d\) are an embedding function mapping \(\mathcal{X}\) to \(\mathcal{H}\) and vice versa (= RNN)
- \(\mathbf{h}_t=e\left(\mathbf{h}_{t-1}, \mathbf{x}_t\right), \quad \hat{\mathbf{x}}_t=d\left(\mathbf{h}_t\right)\).
- \(\mathbf{x}_{1: T}\) : time-series sample with a length of \(T\)
- \(\mathbf{x}_t\) : multi-dimensional observation in \(\mathbf{x}_{1: T}\) at time \(t\).
- \(\mathbf{h}_{1: T}\) and \(\mathbf{h}_t\) are embedded vectors
(2) Conditional Score Network
( Unlike other domains… )
Score network for TS generation must be designed to learn the conditional log likelihood on previous generated observations
Proposed network
- Modify U-net architecture
- modify its 2-d CNN to 1-d
- Concatenate diffused data with condition
- use the concatenated one and temporal feature as input to learn score function
(3) Training Objective Functions
\(L_{e d}\) : train encoder & decoder
- \(L_{e d}=\mathbb{E}_{\mathbf{x}_{1: T}}\left[ \mid \mid \hat{\mathbf{x}}_{1: T}-\mathbf{x}_{1: T} \mid \mid _2^2\right]\).
\(L_{\text {score }}\) : train the conditional score network
- At time \(t\) in \([1: T]\), we diffuse \(\mathbf{x}_{1: t}\) through a sufficiently large number of steps of the forward SDE
- Notation:
- \(\mathbf{x}_{1: t}^s\) : a diffused sample at step \(s \in[0,1]\)
- \(M_\theta\left(s, \mathbf{x}_{1: t}^s, \mathbf{x}_{1: t-1}\right)\) : conditional score network
- learns the gradient of the conditional log-likelihood
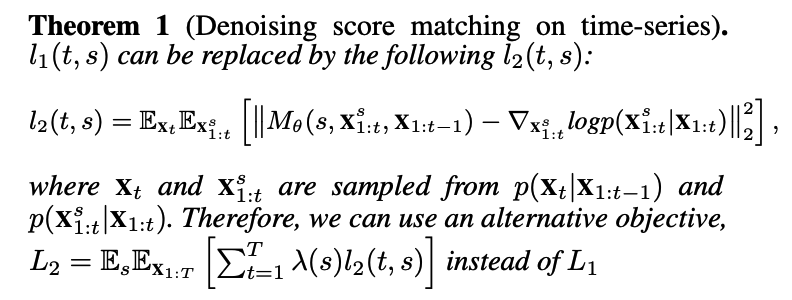
- \(L_1=\mathbb{E}_s \mathbb{E}_{\mathbf{x}_{1: T}}\left[\sum_{t=1}^T \lambda(s) l_1(t, s)\right]\).
- where \(l_1(t, s)=\mathbb{E}_{\mathbf{x}_{1: t}^s}\left[ \mid \mid M_\theta\left(s, \mathbf{x}_{1: t}^s, \mathbf{x}_{1: t-1}\right)-\nabla_{\mathbf{x}_{1: t}^s} \log p\left(\mathbf{x}_{1: t}^s \mid \mathbf{x}_{1: t-1}\right) \mid \mid _2^2\right]\).
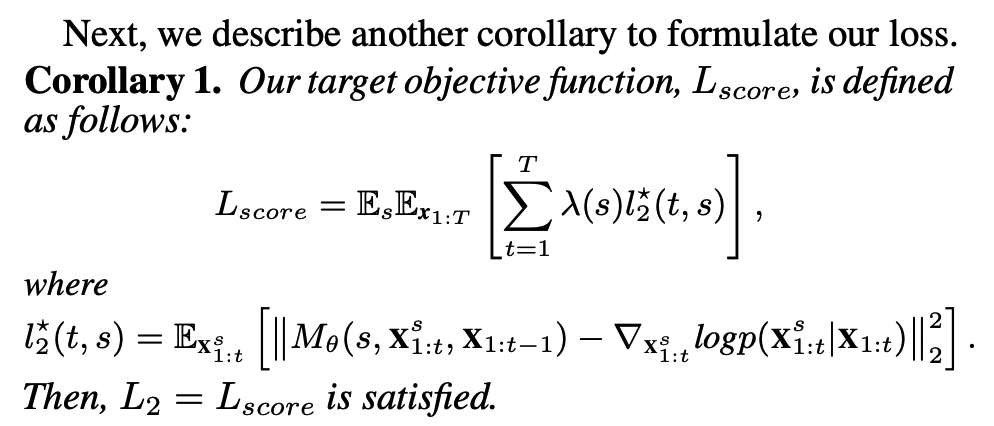
- Can use the efficient denoising score \(\operatorname{loss} L_2\) to train the conditional score network. We set \(\mathbf{x}_0=\mathbf{0}\).
-
\(L_{\text {score }}^{\mathcal{H}}=\mathbb{E}_s \mathbb{E}_{\mathbf{h}_{1: T}} \sum_{t=1}^T\left[\lambda(s) l_3(t, s)\right]\).
with \(l_3(t, s)=\mathbb{E}_{\mathbf{h}_t^s}\left[ \mid \mid M_\theta\left(s, \mathbf{h}_t^s, \mathbf{h}_{t-1}\right)-\nabla_{\mathbf{h}_t^s} \log p\left(\mathbf{h}_t^s \mid \mathbf{h}_t\right) \mid \mid _2^2\right]\).
\(L_{\text {score }}^{\mathcal{H}}\) is what we use for our experiments (instead of \(L_{\text {score }}\)).
(4) Training & Sampling