Multi-resolution Diffusion Models for Time-Series Forecasting
Contents
- Abstract
- Introduction
- Related Works
- Background
- mr-Diff: Multi-Resolution Diffusion model
- Extracting Fine-to-Coarse Trends
- Temporal Multi-resolution Reconstruction
- Experiments
0. Abstract
Diffusion model for TS
-
Do not utilize the unique properties of TS data
- TS data = Different patterns are usually exhibited at multiple scales
\(\rightarrow\) Leverage this multi-resolution temporal structure
mr-Diff
-
Multi-resolution diffusion model
-
Seasonal-trend decomposition
- Sequentially extract fine-to-coarse trends from the TS for forward diffusion
- Coarsest trend is generated first.
- Finer details are progressively added
- using the predicted coarser trends as condition
- Non-autoregressive manner.
1. Introduction
Multi-resolution diffusion (mr-Diff)
- Decomposes the denoising objective into several sub-objectives
Contribution
- Propose the multi-resolution diffusion (mr-Diff) model
- First to integrate the seasonal-trend decomposition-based multi-resolution analysis into TS diffusion
- Progressive denoising in an easy-to-hard manner
- Generate coarser signals first \(\rightarrow\) then finer details.
2. Related Works
TimeGrad (Rasul et al., 2021)
- Conditional diffusion model which predicts in an autoregressive manner
- Condition = hidden state of a RNN
- Suffers from slow inference on long TS (\(\because\) Autoregressive decoding )
CSDI (Tashiro et al., 2021)
- Non-autoregressive generation
- SSL to guide the denoising process
- Needs two transformers to capture dependencies in the channel and time dimensions
-
Complexity is quadratic in the number of variables and length of TS
- Masking-based conditioning
- cause disharmony at the boundaries between the masked and observed regions
SSSD (Alcaraz & Strodthoff, 2022)
- Reduces the computational complexity of CSDI by replacing the transformers with a SSSM
- Same masking-based conditioning as in CSDI
- still suffers from the problem of boundary disharmony
TimeDiff (Shen & Kwok, 2023)
- Non-autoregressive diffusion model
- Future mixup and autoregressive initialization for conditioning
\(\rightarrow\) All these TS diffusion models do not leverage the multi-resolution temporal structures and denoise directly from random vectors as in standard diffusion models.
Multi-resolution analysis techniques
- Besides using seasonal-trend decomposition have also been used for TS modeling
- Yu et al. (2021)
- propose a U-Net (Ronneberger et al., 2015) for graph-structured TS
- leverage temporal information from different resolutions by pooling and unpooling
- Mu2ReST (Niu et al., 2022)
- works on spatio-temporal data
- recursively outputs predictions from coarser to finer resolutions
- Yformer (Madhusudhanan et al., 2021)
- captures temporal dependencies by combining downscaling/upsampling with sparse attention.
- PSA-GAN (Jeha et al., 2022)
- trains a growing U-Net
- captures multi-resolution patterns by progressively adding trainable modules at different levels.
\(\rightarrow\) However, all these methods need to design very specific U-Net structures
3. Background
(1) DDPM
pass
(2) Conditional Diffusion Modles for TS
pass
4. mr-Diff: Multi-Resolution Diffusion Model
Use of multi-resolution temporal patterns in the diffusion model has yet to be explored
\(\rightarrow\) Address this gap by proposing the multi-resolution diffusion (mr-Diff)
Can be viewed as a cascaded diffusion model (Ho et al., 2022)
-
Proceeds in \(S\) stages, with the resolution getting coarser as the stage proceeds
\(\rightarrow\) Allows capturing the temporal dynamics at multiple temporal resolutions
-
In each stage, the diffusion process is interleaved with seasonal-trend decomposition
Notation
- \(\mathbf{X}=\mathbf{x}_{-L+1: 0}\) and \(\mathbf{Y}=\mathbf{x}_{1: H}\)
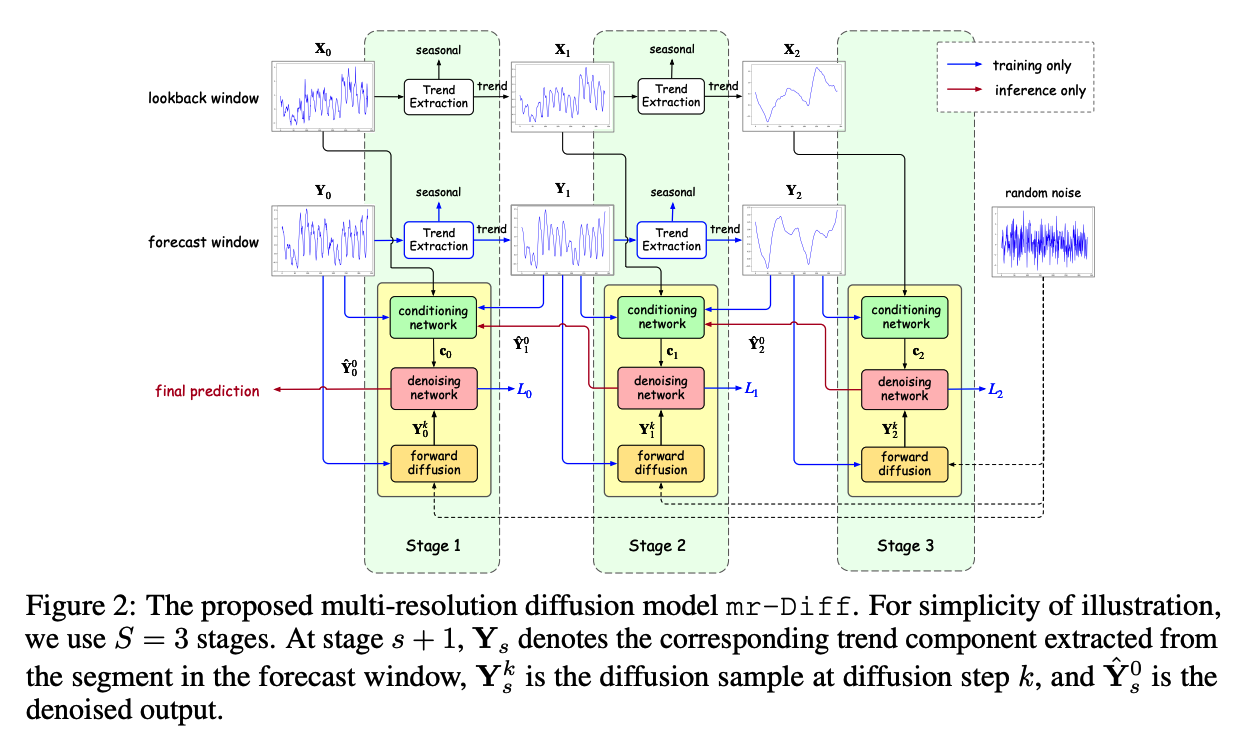
- Trend component of the lookback/forecast) segment at stage \(s+1\) be \(\mathbf{X}_s\) / \(\mathbf{Y}_s\)
- Trend gets coarser as \(s\) increases
- \(\mathbf{X}_0=\mathbf{X}\) and \(\mathbf{Y}_0=\mathbf{Y}\).
In each stage \(s+1\) …
a conditional diffusion model is learned to reconstruct the “trend \(\mathbf{Y}_s\) extracted from the forecast window”
Reconstruction at stage 1 then corresponds to the target TS forecast.
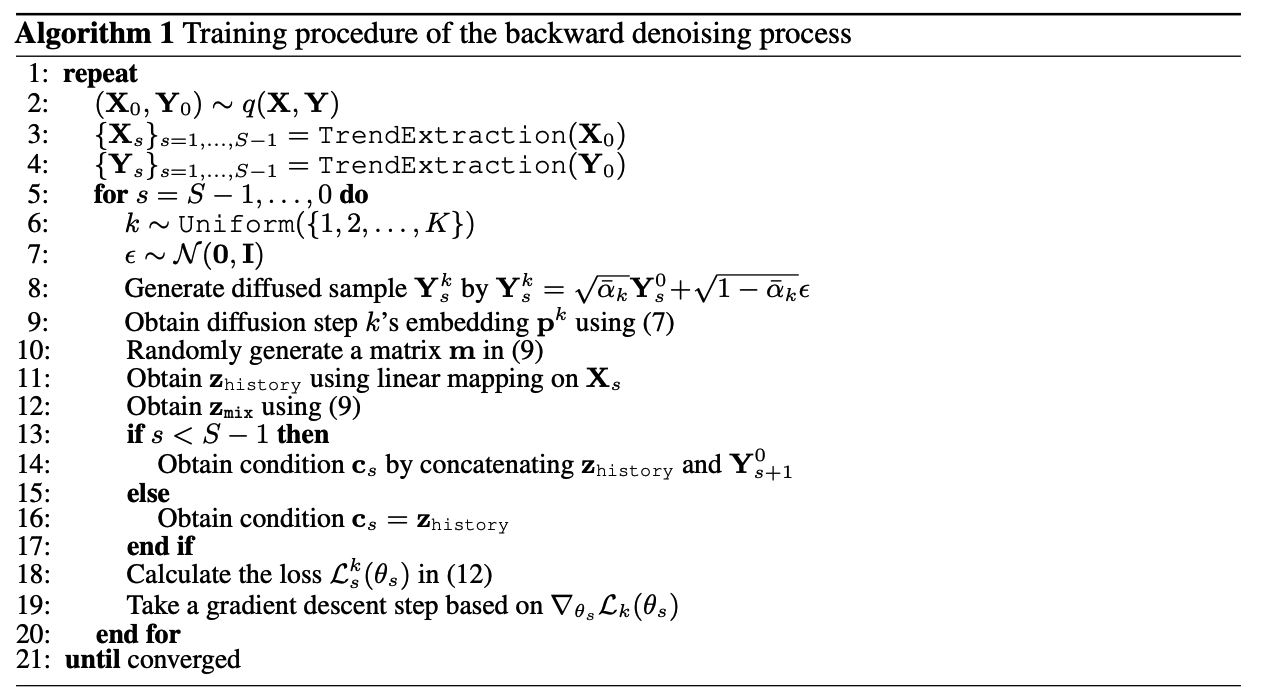
[ Training & Inference ]
Training
- Guide the reconstruction of \(\mathbf{Y}_s\)
- Condition:
- Lookback segment \(\mathbf{X}_s\)
- Coarser trend \(\mathbf{Y}_{s+1}\)
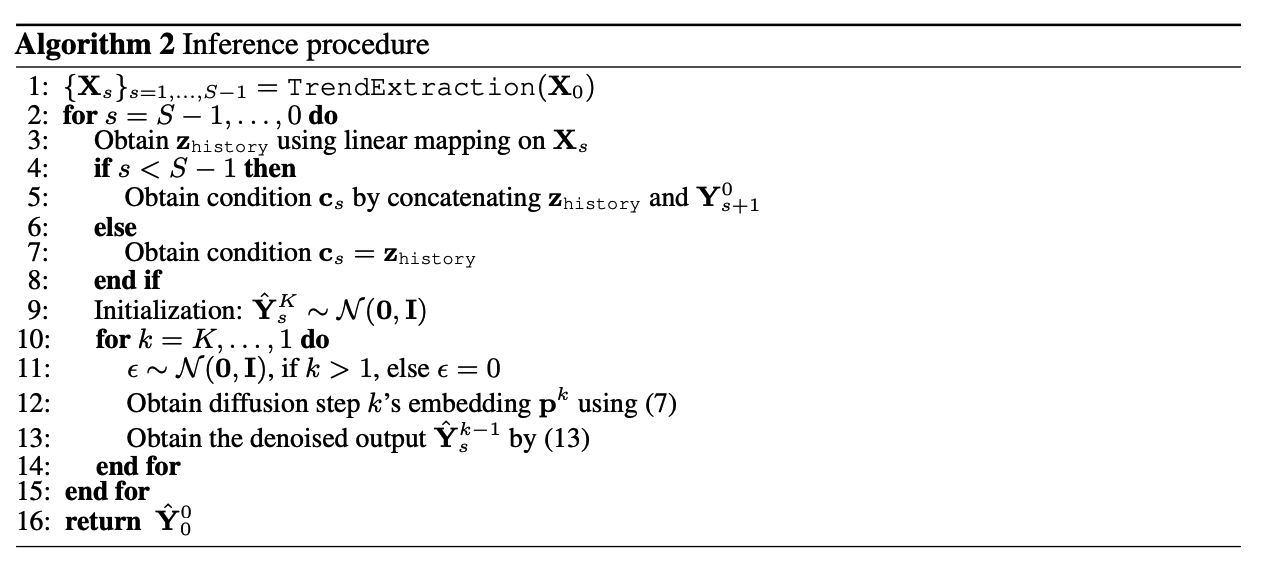
Inference
- Ground-truth \(\mathbf{Y}_{s+1}\) is not available
- Replaced by its estimate \(\hat{\mathbf{Y}}_{s+1}^0\) produced by the denoising process at stage \(s+1\).
(1) Extracting Fine-to-Coarse Trends
TrendExtraction module
- \(\left.\mathbf{X}_s=\text { AvgPool(Padding }\left(\mathbf{X}_{s-1}\right), \tau_s\right), s=1, \ldots, S-1\).
Seasonal-trend decomposition
- Obtains both the seasonal and trend components
- This paper focuses on trend
- Easier to predict a finer trend from a coarser trend
- Finer seasonal component from a coarser seasonal component may be difficult
(2) Temporal Multi-resolution Reconstruction
Sinusoidal position embedding
\(k_{\text {embedding }}=\) \(\left[\sin \left(10^{\frac{0 \times 4}{w-1}} t\right), \ldots, \sin \left(10^{\frac{w \times 4}{w-1}} t\right), \cos \left(10^{\frac{0 \times 4}{w-1}} t\right), \ldots, \cos \left(10^{\frac{w \times 4}{w-1}} t\right)\right]\)
- where \(w=\frac{d^{\prime}}{2}\),
Passing it through….
- \(\mathbf{p}^k=\operatorname{SiLU}\left(\mathrm{FC}\left(\operatorname{SiLU}\left(\mathrm{FC}\left(k_{\text {embedding }}\right)\right)\right)\right)\).
a) Forward Diffusion
\(\mathbf{Y}_s^k=\sqrt{\bar{\alpha}_k} \mathbf{Y}_s^0+\sqrt{1-\bar{\alpha}_k} \epsilon, \quad k=1, \ldots, K\).
b) Backward Denoising
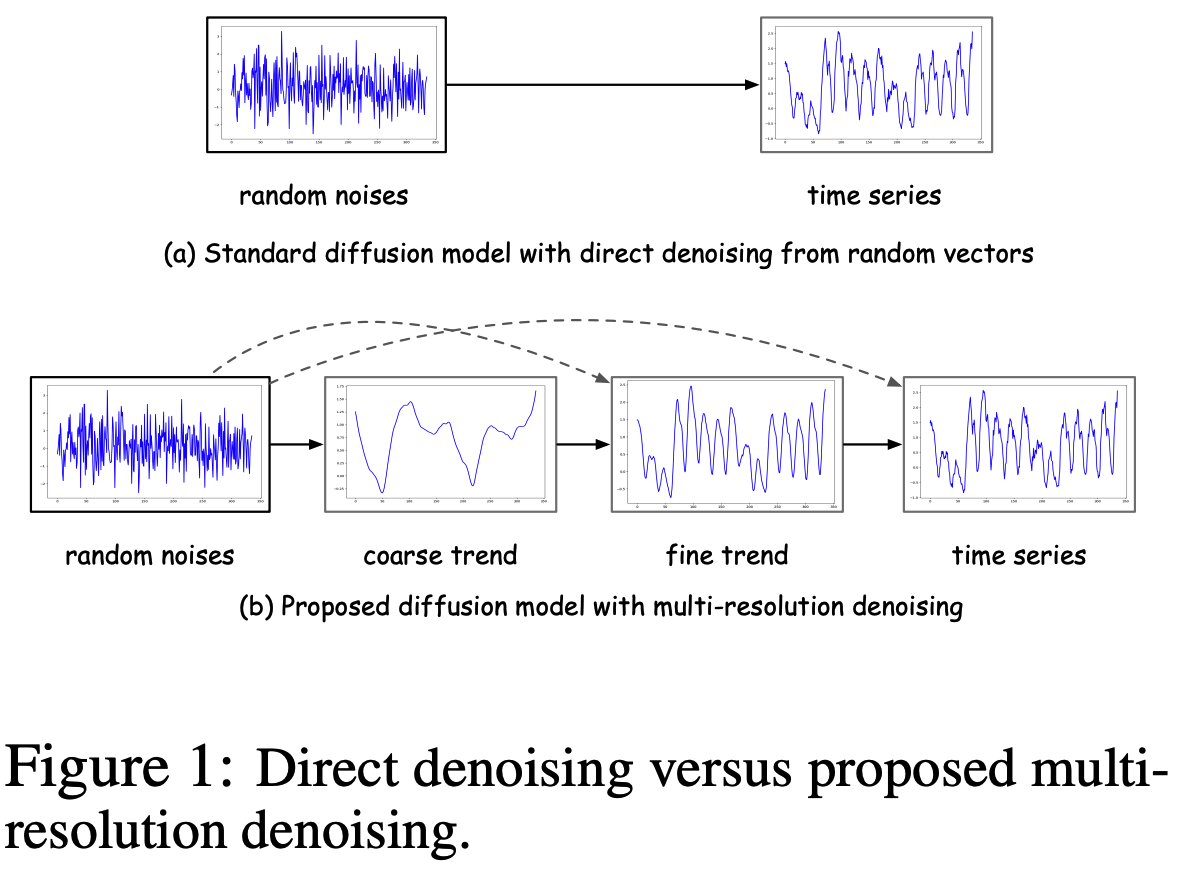
Standard diffusion models
- One-stage denoising directly
mr-Diff
-
Decompose the denoising objective into \(S\) sub-objectives
\(\rightarrow\) Encourages the denoising process to proceed in an easy-to-hard manner
( Coarser trends first, Finer details are then progressively added )
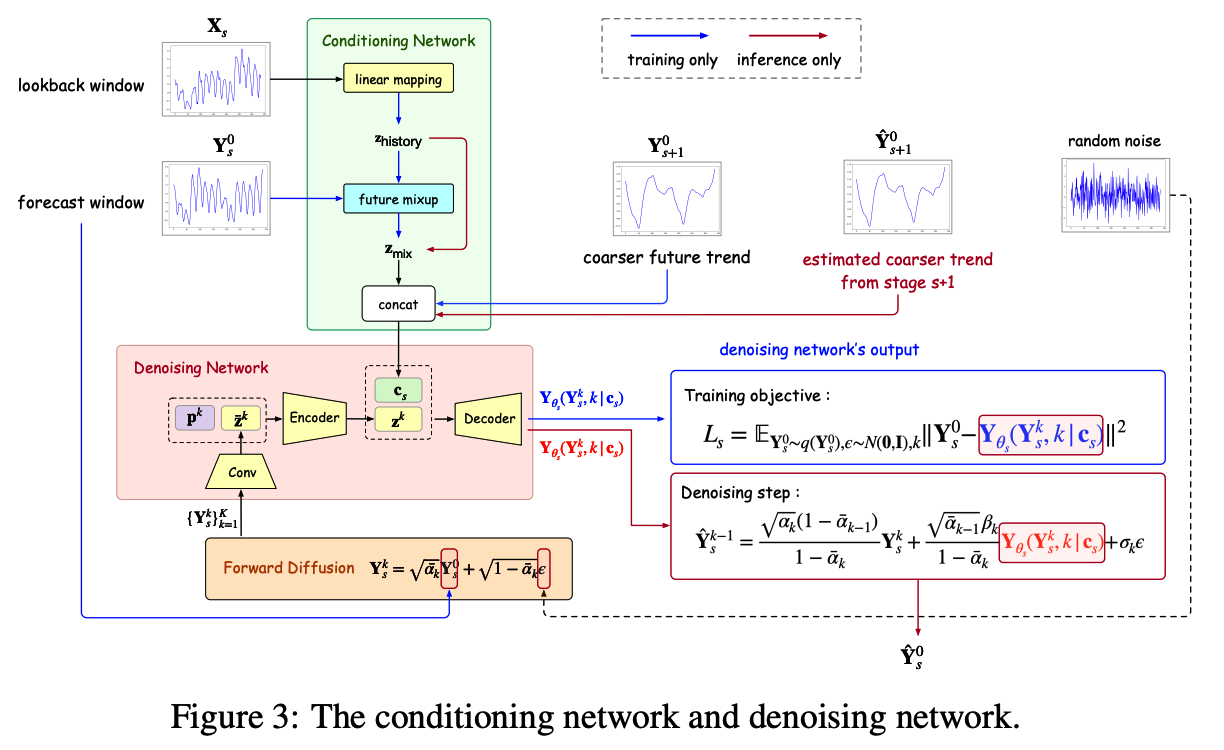
[ Conditioning network ]
Constructs a condition to guide the denoising network
Existing works
- Use the original TS lookback segment \(\mathbf{X}_0\) as condition \(\mathbf{c}\)
mr-Diff
-
Use the lookback segment \(\mathbf{X}_s\) at the same decomposition stage \(s\).
\(\rightarrow\) Allows better and easier reconstruction
( \(\because\) \(\mathbf{X}_s\) has the same resolution as \(\mathbf{Y}_s\) to be reconstructed )
\(\leftrightarrow\) When \(\mathbf{X}_0\) is used as in existing TS diffusion models, the denoising network may overfit temporal details at the finer level.
Procedures
-
Step 1) Linear mapping is applied on \(\mathbf{X}_s\) to produce a \(\mathbf{z}_{\text {history }} \in \mathbb{R}^{d \times H}\).
-
Step 2) Future-mixup: to enhance \(\mathbf{z}_{\text {history }}\).
-
\(\mathbf{z}_{\text {mix }}=\mathbf{m} \odot \mathbf{z}_{\text {history }}+(1-\mathbf{m}) \odot \mathbf{Y}_s^0\).
-
Similar to teacher forcing, which mixes the ground truth with previous prediction output
-
-
Step 3) Coarser trend \(\mathbf{Y}_{s+1}\left(=\mathbf{Y}_{s+1}^0\right)\) can also be useful for conditioning
\(\rightarrow\) \(\mathbf{z}_{\operatorname{mix}}\) is concatenated with \(\mathbf{Y}_{s+1}^0\) to produce the condition \(\mathbf{c}_s\) (a \(2 d \times H\) tensor).
Inference
-
Ground-truth \(\mathbf{Y}_s^0\) is no longer available
\(\rightarrow\) No future-mixup … simply set \(\mathbf{z}_{\text {mix }}=\mathbf{z}_{\text {history }}\).
-
Coarser trend \(\mathbf{Y}_{s+1}\) is also not available
\(\rightarrow\) Concatenate \(\mathbf{z}_{\text {mix }}\) with the estimate \(\hat{\mathbf{Y}}_{s+1}^0\) generated from stage \(s+2\) .
[ Denoising Network ]
Outputs a \(\mathbf{Y}_{\theta_s}\left(\mathbf{Y}_s^k, k \mid \mathbf{c}_s\right)\) with guidance from the condition \(\mathbf{c}_s\)
Denoising process at step \(k\) of stage \(s+1\):
-
\(p_{\theta_s}\left(\mathbf{Y}_s^{k-1} \mid \mathbf{Y}_s^k, \mathbf{c}_s\right)=\mathcal{N}\left(\mathbf{Y}_s^{k-1} ; \mu_{\theta_s}\left(\mathbf{Y}_s^k, k \mid \mathbf{c}_s, \sigma_k^2 \mathbf{I}\right)\right), k=K, \ldots, 1\).
-
\(\mathbf{Y}_{\theta_s}\left(\mathbf{Y}_s^k, k \mid \mathbf{c}_s\right)\) is an estimate of \(\mathbf{Y}_s^0\).
Procedures
- Step 1) Maps \(\mathbf{Y}_s^k\) to the embedding \(\overline{\mathbf{z}}^k \in \mathbb{R}^{d^{\prime} \times H}\)
- Step 2) Concatenate with diffusion-step \(k\) ‘s embedding \(\mathbf{p}^k \in \mathbb{R}^{d^{\prime}}\)
- Step 3) Feed to an encoder to obtain the \(\mathbf{z}^k \in \mathbb{R}^{d^{\prime \prime} \times H}\).
- Step 4) Concatenate \(\mathbf{z}^k\) and \(\mathbf{c}_s\) along the variable dimension
- Form a tensor of size \(\left(2 d+d^{\prime \prime}\right) \times H\).
- Step 5) Feed to a decoder
- Outputs \(\mathbf{Y}_{\theta_s}\left(\mathbf{Y}_s^k, k \mid \mathbf{c}_s\right)\).
Loss function:
- \(\min _{\theta_s} \mathcal{L}_s\left(\theta_s\right)=\min _{\theta_s} \mathbb{E}_{\mathbf{Y}_s^0 \sim q\left(\mathbf{Y}_s\right), \epsilon \sim \mathcal{N}(\mathbf{0}, \mathbf{I}), k} \mid \mid \mathbf{Y}_s^0-\mathbf{Y}_{\theta_s}\left(\mathbf{Y}_s^k, k \mid \mathbf{c}_s\right) \mid \mid ^2\).
Inference
- For each \(s=S, \ldots, 1\), we start from \(\hat{\mathbf{Y}}_s^K \sim \mathcal{N}(\mathbf{0}, \mathbf{I})\)
- Each denoising step from \(\hat{\mathbf{Y}}_s^k\) (an estimate of \(\mathbf{Y}_s^k\) ) to \(\hat{\mathbf{Y}}_s^{k-1}\) :
- \(\hat{\mathbf{Y}}_s^{k-1}=\frac{\sqrt{\alpha_k}\left(1-\bar{\alpha}_{k-1}\right)}{1-\bar{\alpha}_k} \hat{\mathbf{Y}}_s^k+\frac{\sqrt{\bar{\alpha}_{k-1}} \beta_k}{1-\bar{\alpha}_k} \mathbf{Y}_{\theta_s}\left(\hat{\mathbf{Y}}_s^k, k \mid \mathbf{c}_s\right)+\sigma_k \epsilon\).
Pseudocode
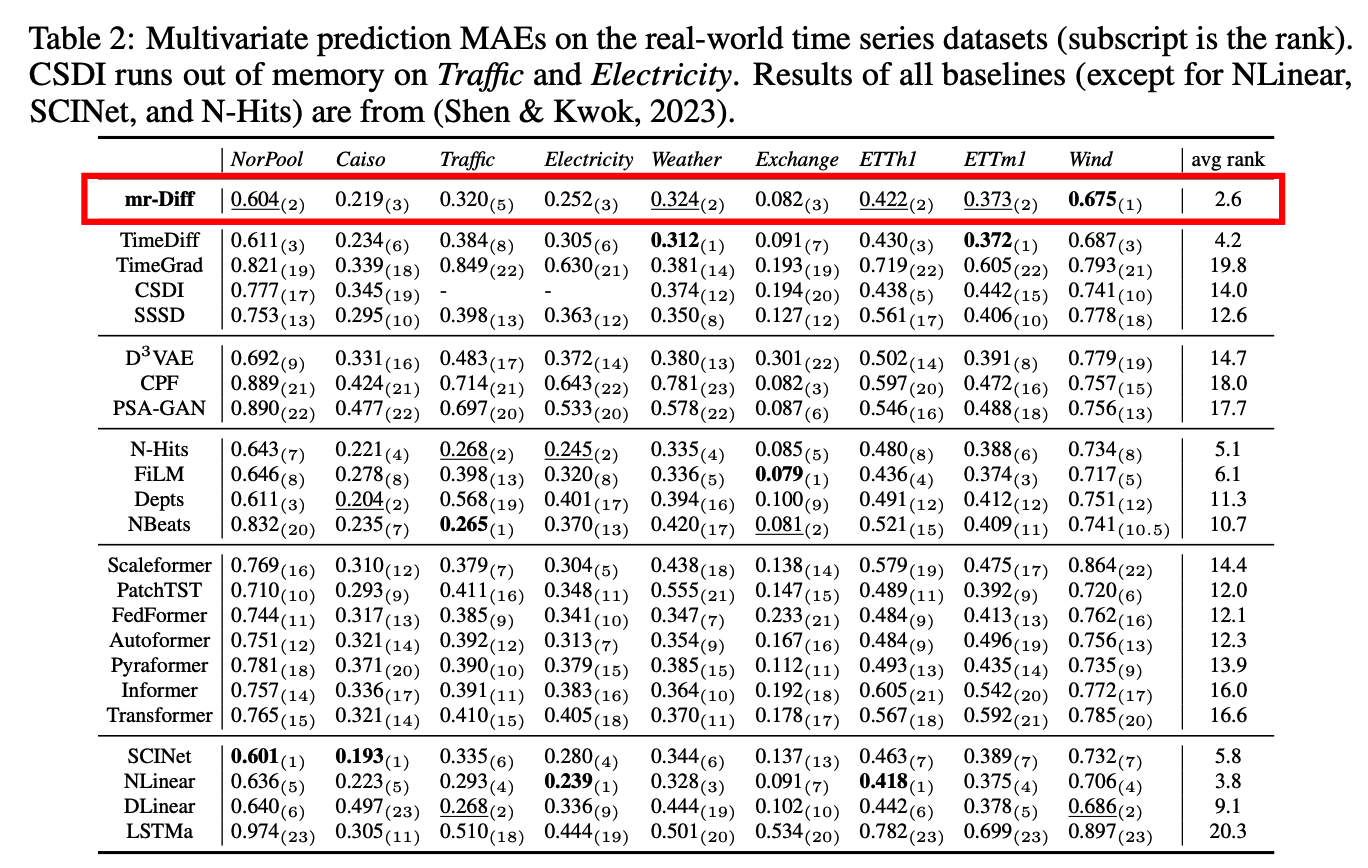
5. Experiments
22 recent strong prediction models
9 popular real-world time series datasets
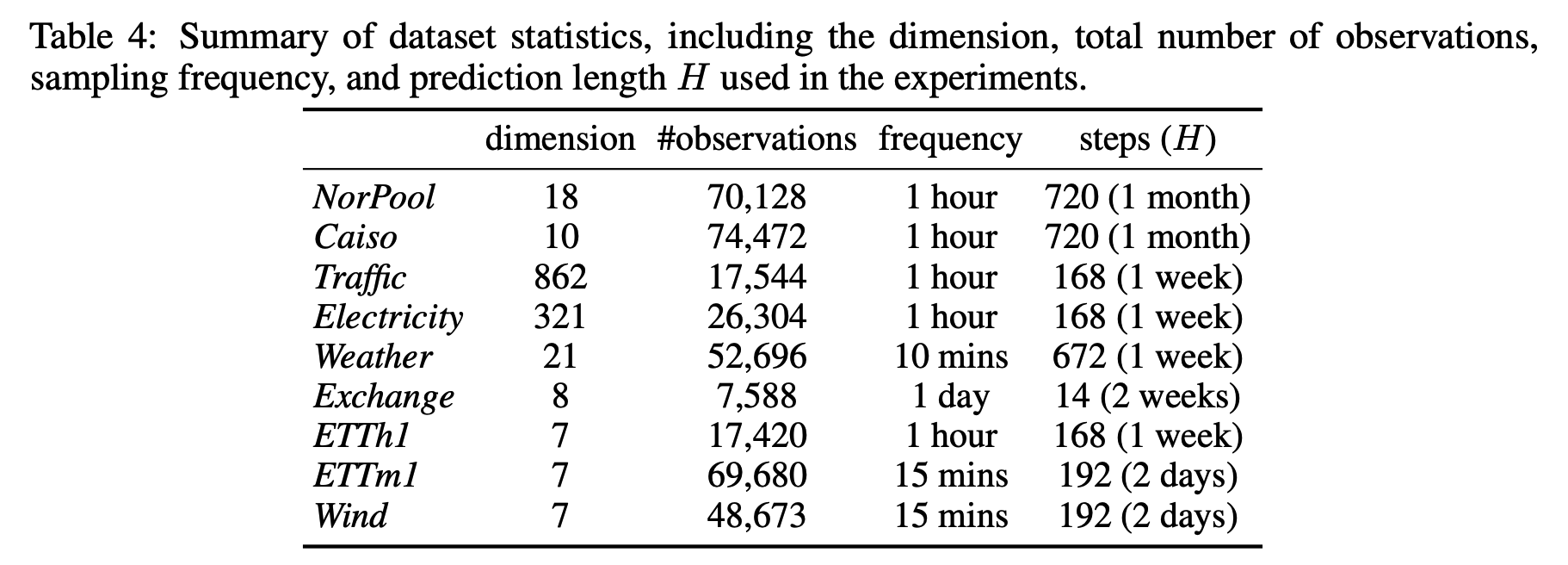
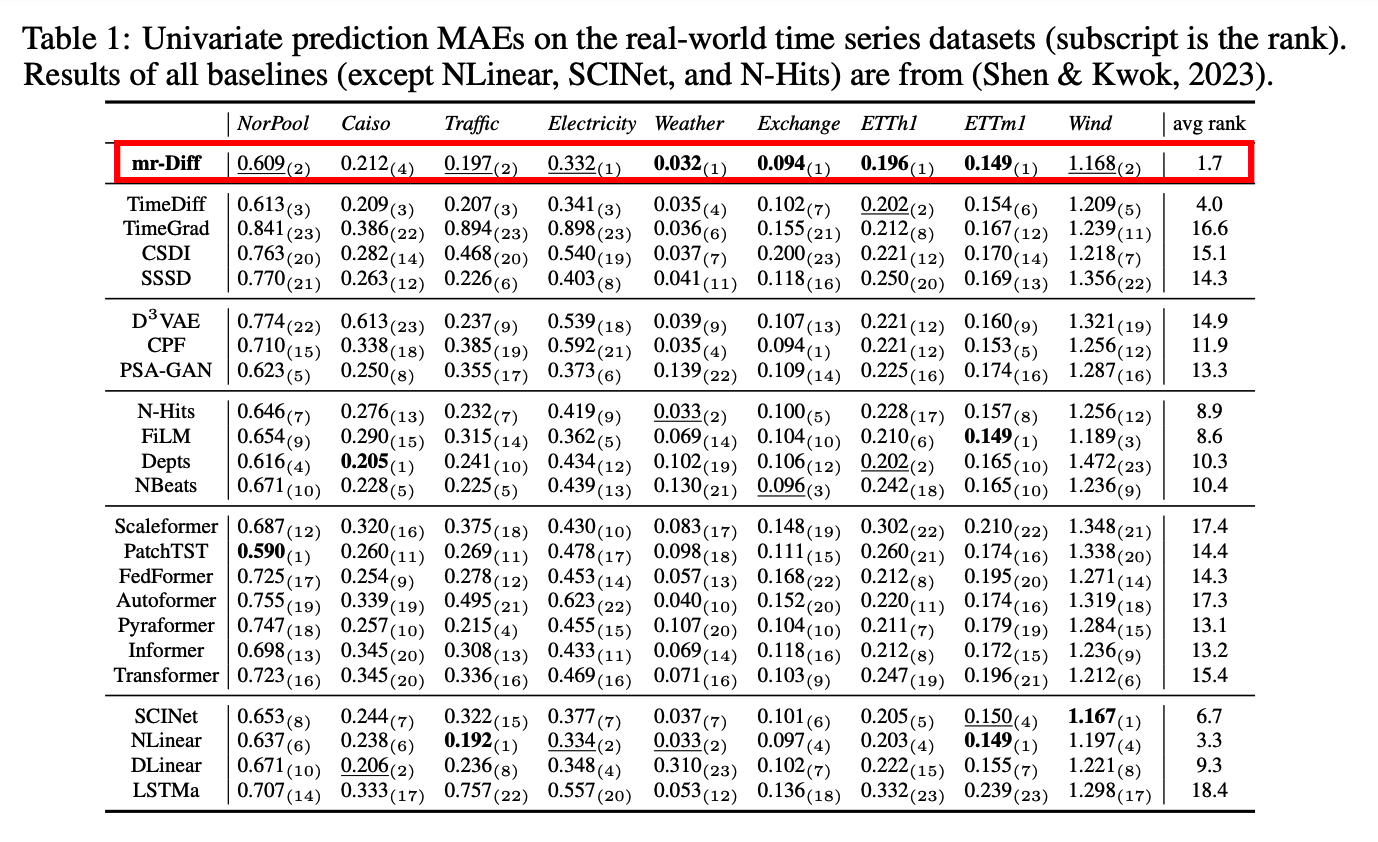
a) Performance Measures
-
mean absolute error (MAE)
-
mean squared error (MSE)
( results on MSE are in Appendix K )
b) Implementation Details
- Adam with a learning rate of \(10^{-3}\).
- Batch size is 64
- Early stopping for a maximum of 100 epochs.
- \(K=100\) diffusion steps are used
- with a linear variance schedule (Rasul et al., 2021) starting from \(\beta_1=10^{-4}\) to \(\beta_K=10^{-1}\)
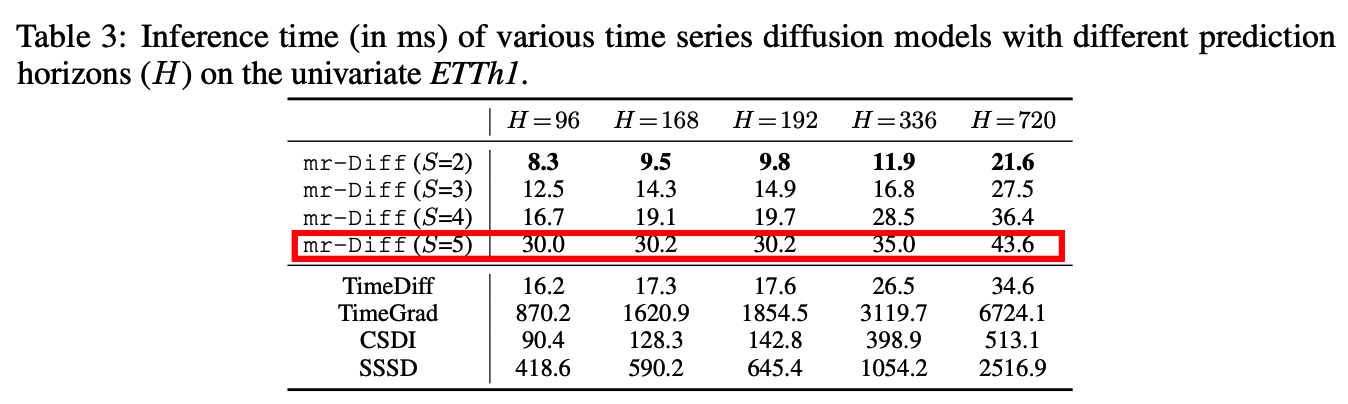
- \(S=5\) stages
- History length (in \(\{96,192,336,720,1440\}\) )
- is selected by using the validation set
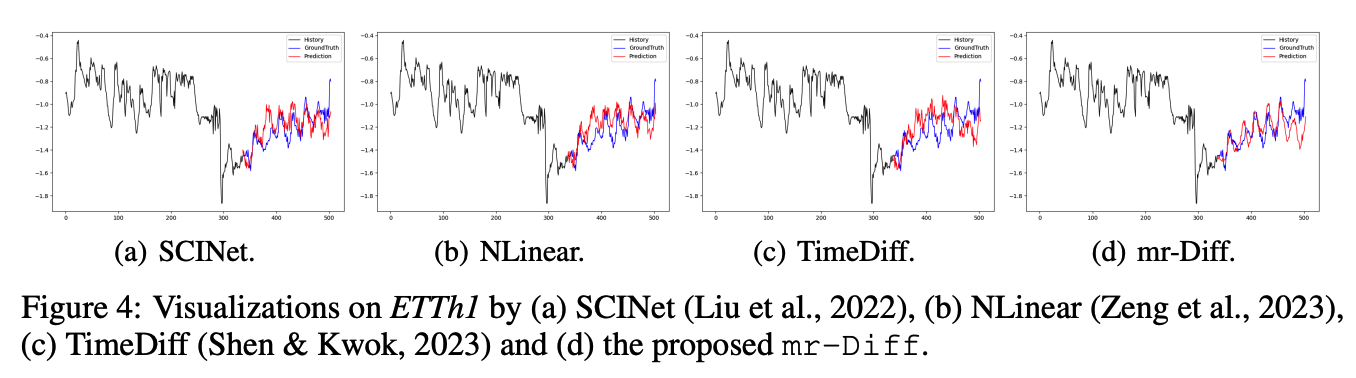
(1) Main Results
(2) Inference Efficiency