
Change Point Detection in Time Series Data using Autoencoders with a Time-Invariant Representation (2020, 4)
Contents
- Abstract
- Introduction
- Problem Formulation
- AE based CPD
- Preprocessing
- Feature Encoding
- Post processing & Peak detection
0. Abstract
CPD = locate abrupt property changes
This paper…
-
uses autoencoder (AE) based methodology with novel loss function
-
mitigate the issue of false detection alarms using a post-processing procedure
Allow user to indicate whether
- change points should be sought in time domain, frequency domain, or both
Detectable change points : abrupt changes in…
- slope / mean / variance / autocorrelation / frequency spectrum
1. Introduction
CPD’s goal
- 1) goal in itself
- 2) pre-processing tool to segment a TS in homogeneous segments
CPD’s categories
-
1) online CPD :
- real-time detection
- dissimilarity = based on difference in distn of 2 intervals
-
2) retrospective (offline) CPD :
- robust detections
-
at the cost of needing more future data
- ( this paper focuses on this method )
Many CPD algorithms compare “past & future TS”, by means of “dissimilarity” measure
Past Works ( algorithm : assumption(model) )
- ex 1) CUSUM : parametric probability distribution
- ex 2) GLR : autoregressive model
- ex 3) subspace method : state-space model
- ex 4) Bayesian online CPD
\(\rightarrow\) performance depends on “how well actual data follows the assumed model”
- ex 5) KDE : parameter free
- ex 6) Related Density Ratio estimation : parameter free
ex 7) autoencoder
-
pros
- absence of distn assumptions
- extract complex features in cost-efficient ways
-
cons
-
no guarantee that distance between consecutive features reflect actual dissimilarity
- correlated nature of TS samples is not properly used
- absence of post-processing procedure preceding detection of peaks in the dissimilarity measure leads to high FP detection alarms
-
TIRE (partially Time Invariate REpresentation)
-
new AE-based CPD
-
contribution
-
1) novel adaptation of AE with a loss function that promotes time-invariant features ( + define new dissimilarity measure )
-
2) focus on non-iid data, use discrete Fourier transform to obtain temporally localized spectral information, propose an approach that combines “time & frequency” domain info
-
2. Problem Formulation
\(\mathbf{X}\) : time series of…
- # of channel : \(d\)
- \(\mathbf{X}^{i}\) : \(i\)th channel
- length : \(T\) ( where \(0=T_{0} < T_1 < \cdots < T_p = T\) )
- \(T_1, T_2, \cdots\) : change points
\(\left(\mathbf{X}\left[T_{k}+1\right], \ldots, \mathbf{X}\left[T_{k+1}\right]\right)\) : subsequence of time series
- realization of discrete time weak-sense stationary stochastic (WSS) process
Goal of CPD
- estimate change points, w.o prior knowledge on “number & location”
Dissimilarity Measure
- dissimilarity between (a) & (b)
- (a) \((\mathbf{X}[t-N+1], \ldots, \mathbf{X}[t])\)
- (b) \((\mathbf{X}[t+1], \ldots, \mathbf{X}[t+N])\)
- \(N\) : user defined “window size”
Goal (1) :
- develop a CPD-tailored feature embedding
- and corresponding dissimilarity measure \(D_t\)
- ( \(D_t\) peaks, when the WSS restriction is violated )
Goal (2) :
- determine all local maxima
- label each local maximum, which exceed certain threshold \(\tau\)
3. AE based CPD
(1) Preprocessing
step 1) divide each channel into window size of \(N\)
- \(\mathbf{x}_{t}^{i}=\left[\mathbf{X}^{i}[t-N+1], \ldots, \mathbf{X}^{i}[t]\right]^{T} \in \mathbb{R}^{N}\).
step 2) combine for every \(t\) ( into single vector )
- \(\mathbf{y}_{t}=\left[\left(\mathbf{x}_{t}^{1}\right)^{T}, \ldots,\left(\mathbf{x}_{t}^{d}\right)^{T}\right]^{T} \in \mathbb{R}^{N d}\).
step 3) Transformation
- (1) : DFT (discrete Fourier transform)
- DFT on each window
- to obtain “temporally localized spectral information”
- DFT on each window
-
(2) : cropped to length \(M\)
-
(1) + (2) = \(\mathcal{F}: \mathbb{R}^{N} \rightarrow \mathbb{R}^{M}\)
-
\(\mathbf{z}_{t}=\left[\mathcal{F}\left(\mathbf{x}_{t}^{1}\right)^{T}, \ldots, \mathcal{F}\left(\mathbf{x}_{t}^{d}\right)^{T}\right]^{T} \in \mathbb{R}^{M d}\)>
( = frequency-domain counterpart of \(y_t\) )
(2) Feature Encoding
[1] use AEs to extract features…
-
from **time-domain(TD) windows **\(\left\{\mathbf{y}_{t}\right\}_{t}\)
-
from frequency-domain (FD) windows \(\left\{\mathbf{z}_{t}\right\}_{t}\).
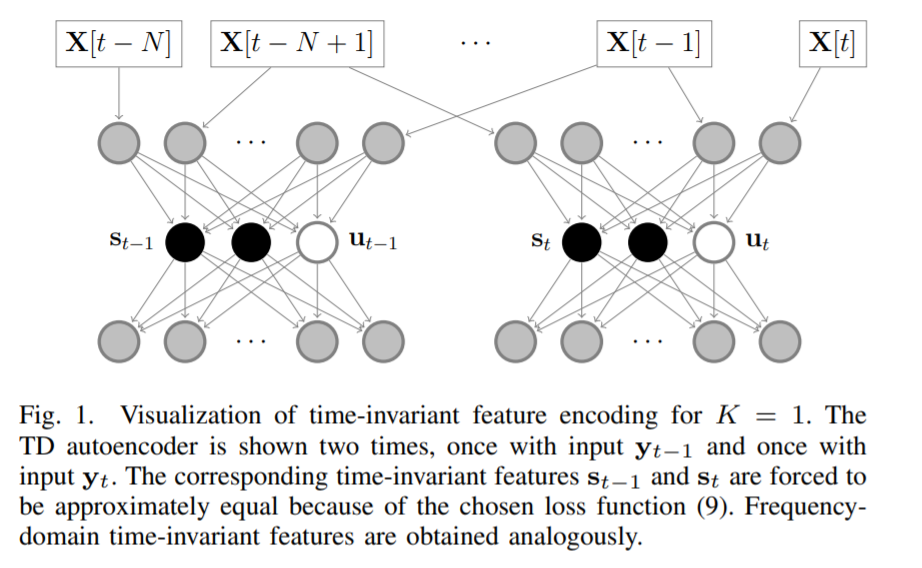
[2] proposal of new loss function
- that promotes time-invariance of the features in consecutive windows
Notation
- ENC input : \(\mathbf{y}_{t} \in \mathbb{R}^{N d}\)
- ENC output : \(\mathbf{h}_{t}=\sigma\left(\mathbf{W} \mathbf{y}_{t}+\mathbf{b}\right)\)
- DEC output : \(\tilde{\mathbf{y}}_{t}=\sigma^{\prime}\left(\mathbf{W}^{\prime} \mathbf{h}_{t}+\mathbf{b}^{\prime}\right)\)
- choose \(\sigma=\sigma^{\prime}\) to be the hyperbolic tangent function
- minimize \(\mid \mid \mathbf{y}_{t} - \tilde{\mathbf{y}}_{t} \mid \mid\)
BUT, \(\mathbf{h}_t\) will also contain information “NOT relevant to CPD”
- ex) phase shift, noise …
\(\rightarrow\) solve by introducing….
\(\mathbf{h}_{t}=\left[\left(\mathbf{s}_{t}\right)^{T},\left(\mathbf{u}_{t}\right)^{T}\right]^{T}\).
- 1) time invariant features : \(\mathbf{s}_{t} \in \mathbb{R}^{s}\)
- invariant over time within a WSS segment
- ex) mean, amplitude, frequency
- 2) instantaneous features : \(\mathbf{u}_{t} \in \mathbb{R}^{h-s}\)
- all other info
Minimize the loss function…
-
(original) \(\sum_{t}\left( \mid \mid \mathbf{y}_{t}-\tilde{\mathbf{y}}_{t} \mid \mid _{2}+\lambda \mid \mid \mathbf{s}_{t}-\mathbf{s}_{t-1} \mid \mid _{2}\right)\)
-
(SGD) \(\sum_{t \in \mathcal{T}_{j}}\left( \mid \mid \mathbf{y}_{t}-\tilde{\mathbf{y}}_{t} \mid \mid _{2}+\lambda \mid \mid \mathbf{s}_{t}-\mathbf{s}_{t-1} \mid \mid _{2}\right)\)
-
but, \(t \in \mathcal{T}_{j}\) does not generally imply that \(t-1 \in \mathcal{T}_{j}\).
\(\rightarrow\) \(\sum_{t \in \mathcal{T}_{j}}\left( \mid \mid \mathbf{y}_{t}-\tilde{\mathbf{y}}_{t} \mid \mid _{2}+\frac{\lambda}{K} \sum_{k=0}^{K-1} \mid \mid \mathbf{s}_{t-k}-\mathbf{s}_{t-k-1} \mid \mid _{2}\right)\).
- can think of it as \(K+1\) parallel autoencoders
the number of instantaneous features should be taken as small as possible!
(3) Post processing & Peak detection
construct dissimilarity measure!
1) Postprocessing
- combine TD & FD time-invariant features into single feature!
- \(\mathbf{s}_{t}=\left[\alpha \cdot\left(\mathbf{s}_{t}^{\mathrm{TD}}\right)^{T}, \beta \cdot\left(\mathbf{s}_{t}^{\mathrm{FD}}\right)^{T}\right]^{T}\).
- zero-delay weighted moving average filter to smoothen!
- \(\tilde{\mathbf{s}}_{t}[i]=\sum_{k=-N+1}^{N-1} \mathbf{v}[N-k] \cdot \mathbf{s}_{t+k}[i]\).
- triangular shaped weighting window
Dissimilarity measure
- \(\mathcal{D}_{t}= \mid \mid \tilde{\mathbf{s}}_{t}-\tilde{\mathbf{s}}_{t+N} \mid \mid _{2}\).
- by expert knowledge…
- case 1) \(\alpha=1\) and \(\beta=0\)
- case 2) \(\alpha=0\) and \(\beta=1\)
- case 3) \(\alpha=Q\left(\left\{\mathcal{D}_{t}^{\mathrm{FD}}\right\}_{t}, 0.95\right) \quad \text { and } \quad \beta=Q\left(\left\{\mathcal{D}_{t}^{\mathrm{TD}}\right\}_{t}, 0.95\right)\).
2) Peak Detection
difficult to automatically select a representative peak!
\(\rightarrow\) propose to reuse the impulse response \(\mathbf{v}\) from the moving average filtering
\(\tilde{\mathcal{D}}_{t}=\sum_{k=-N+1}^{N-1} \mathbf{v}[N-k] \cdot \mathcal{D}_{t+k} .\).
detected alarms correspond to all local maxima of \(\left(\tilde{\mathcal{D}}_{N}, \tilde{\mathcal{D}}_{N+1}, \ldots, \tilde{\mathcal{D}}_{T-N}\right)\).
Prominence of peak : minimum height needed
Given that \(\mathcal{D}_t\) is a local maximum…
- step 1) define the 2 closest time stamps left & right of \(t\),
for which the dissimilarity measure is larger than \(\mathcal{D}_t\) ( = \(t_L\) & \(t_R\) )
- \(t_{L} =\max \left\{\sup \left\{t^{*} \mid \mathcal{D}_{t^{*}}>\mathcal{D}_{t} \text { and } t^{*}<t\right\}, N\right\}\).
- \(t_{R} =\min \left\{\inf \left\{t^{*} \mid \mathcal{D}_{t^{*}}>\mathcal{D}_{t} \text { and } t^{*}>t\right\}, T-N\right\}\).
- step 2) Prominence \(\mathcal{P}(\mathcal{D}_t)\) of local maximum \(\mathcal{D}_t\) :
- \(\mathcal{P}\left(\mathcal{D}_{t}\right)=\mathcal{D}_{t}-\max \left\{\min _{t_{L}<t^{*}<t} \mathcal{D}_{t^{*}}, \min _{t<t^{*}<t_{R}} \mathcal{D}_{t^{*}}\right\}\).