
Recurrent Neural Networks for MTS with Missing Values (2018, 1114)
Contents
- Abstract
- Introduction
- Methods
- Notations
- GRU-RNN for TSC
- GRU-D : model with trainable decays
0. Abstract
-
data : MTS with missing values
-
missing patterns are correlated with “target labels”
-
propose GRU-D
-
based on GRU
-
takes 2 representations of missing patterns
- 1) masking
- 2) time interval
-
not only captures “LONG-term temporal dependencies”
but also utilizes the “MISSING PATTERNS”
-
1. Introduction
Missing Values are often “Informative Missingness”
\(\rightarrow\) missing values & patterns provide rich information about target labels
( = often correlated with labels )
Various approaches to deal with missing values
- 1) omission
- 2) data imputation
- do not capture variable correlation & complex patterns
- ex) spectral analysis, kernel methods, EM algorithm, matrix completion/factirization
- 3) multiple imputation
- (data imputation x n) & average them
After imputation, build model! \(\rightarrow\) 2 step process ( not effective )
RNN based models
- RNNs for missing data have been studied
- ex) concatenate missing entries/timestamps with the **input **
- but no works related to “TSC”
GRU-D
-
propose novel DL method
-
2 representations of informative missingness patterns
- 1) masking :
- informs the model “which inputs are observed”
- 2) time interval
- encapsulates the input observation patterns
- 1) masking :
-
not only captures “LONG-term temporal dependencies”
but also utilizes the “MISSING PATTERNS”
2. Methods
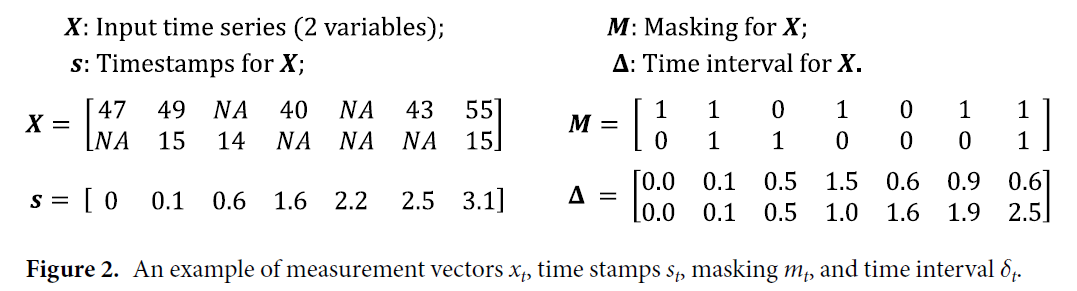
(1) Notations
\(X=\left(x_{1}, x_{2}, \ldots, x_{T}\right)^{T} \in \mathbb{R}^{T \times D}\).
- \(t \in\{1,2, \ldots, T\}, x_{t} \in \mathbb{R}^{D}\).
-
\(x_{t}^{d}\) : \(d\)-th variable of \(x_t\)
- \(D\): # of variables
- \(T\) : length
\(s_{t} \in \mathbb{R}\) : time stamp when the \(t\)-th observation is obtained
- assume first observation is made at time stamp 0 ( \(s_{1}=0\) )
\(m_{t} \in\{0,1\}^{D}\) : masking vector
- denote which variables are missing
- \(m_{t}^{d}= \begin{cases}1, & \text { if } x_{t}^{d} \text { is observed } \\ 0, & \text { otherwise }\end{cases}\).
Time interval ( since its last observation )
\(\delta_{t}^{d}= \begin{cases}s_{t}-s_{t-1}+\delta_{t-1}^{d}, & t>1, m_{t-1}^{d}=0 \\ s_{t}-s_{t-1}, & t>1, m_{t-1}^{d}=1 \\ 0, & t=1\end{cases}\).
Goal : Time Series Classification
- predict labels \(l_{n} \in\{1, \ldots, L\}\)
- given…
- 1) \(\mathcal{D}=\left\{\left(X_{n}, s_{n}, M_{n}\right)\right\}_{n=1}^{N}\).
- 2) \(X_{n}=\left[x_{1}^{(n)}, \ldots, x_{T_{n}}^{(n)}\right]\).
- 3) \(s_{n}=\left[s_{1}^{(n)}, \ldots, s_{T_{n}}^{(n)}\right]\).
- 4) \(M_{n}=\left[m_{1}^{(n)}, \ldots, m_{T_{n}}^{(n)}\right]\).
(2) GRU-RNN for TSC
output of GRU at the last step \(\rightarrow\) predict labels
3 ways to handle missing values (w.o imputation)
-
1) GRU-Mean
replace each missing observation with “mean of the variable”
- \(x_{t}^{d} \leftarrow m_{t}^{d} x_{t}^{d}+\left(1-m_{t}^{d}\right) \widetilde{x}^{d}\).
- where \(\tilde{x}^{d}=\sum_{n=1}^{N} \sum_{t=1}^{T_{n}} m_{t, n}^{d} x_{t, n}^{d} / \sum_{n=1}^{N} \sum_{t=1}^{T_{n}} m_{t, n}^{d}\).
- \(\widetilde{x}^{d}\) is calculated only by “training dataset”
- \(x_{t}^{d} \leftarrow m_{t}^{d} x_{t}^{d}+\left(1-m_{t}^{d}\right) \widetilde{x}^{d}\).
-
2) GRU-Forward
replace it with last measurement
- \(x_{t}^{d} \leftarrow m_{t}^{d} x_{t}^{d}+\left(1-m_{t}^{d}\right) x_{t^{\prime}}^{d}\).
- where \(t^{\prime}<t\) is the last time the \(d\)-th variable was observed
- \(x_{t}^{d} \leftarrow m_{t}^{d} x_{t}^{d}+\left(1-m_{t}^{d}\right) x_{t^{\prime}}^{d}\).
-
3) GRU-Simple
just indicate “which variables are missing” & “how long they have been missing”
- \(x_{t}^{(n)} \leftarrow\left[x_{t}^{(n)} ; m_{t}^{(n)} ; \delta_{t}^{(n)}\right]\).
Problems
- 1), 2) …. cannot distinguish whether missing values are imputed/observed
- 3) … fails to exploit the temporal structure of missing values
(3) GRU-D : model with trainable decays
Characteristic of health-care data
-
1) missing variables tend to be close to some default value,
if its last observation happens long time ago
-
2) influence of the input fades away over time
\(\rightarrow\) propose GRU-D to capture both!
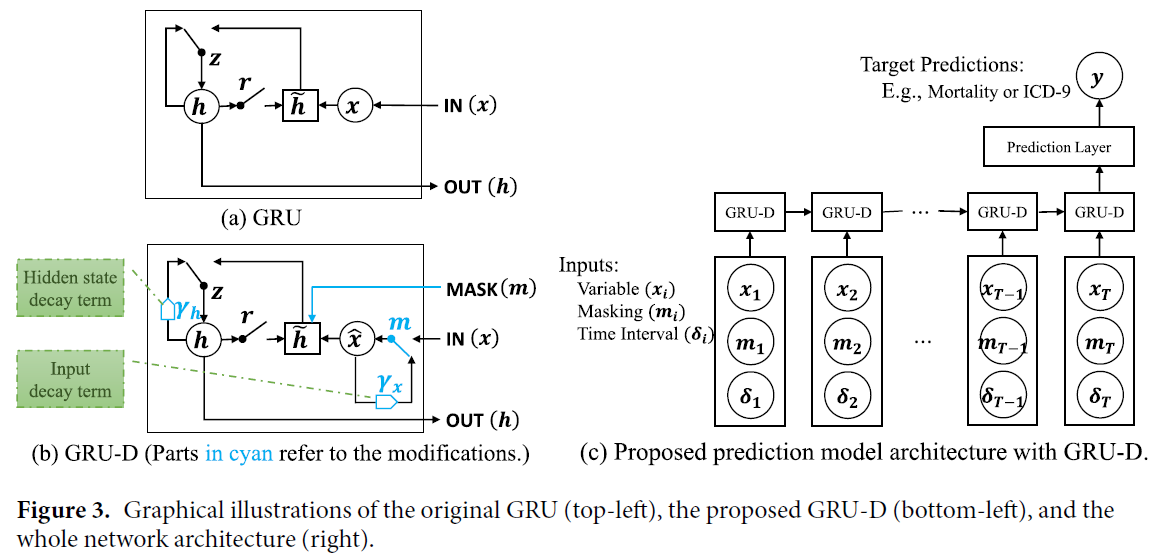
Introduce “decay rates (\(\gamma\))”,
- \(\gamma_{t}=\exp \left\{-\max \left(0, W_{\gamma} \delta_{t}+b_{\gamma}\right)\right\}\).
to control decay mechanism, by considering…
- 1) decay rates should differ from variable
- 2) “learn” decay rates
Incorporates 2 different “trainable decay” mechanism
- 1) input decay \(\gamma_{x}\)
- 2) hidden state decay \(\gamma_{h}\)
Input decay
\(\hat{x}_{t}^{d}=m_{t}^{d} x_{t}^{d}+\left(1-m_{t}^{d}\right)\left(\gamma_{x_{t}}^{d} x_{t^{\prime}}^{d}+\left(1-\gamma_{x_{t}}^{d}\right) \widetilde{x}^{d}\right)\).
- \(x_{t^{\prime}}^{d}\) : last observation of \(d\)-th variable
- \(\tilde{x}^{d}\) : empirical mean of \(d\)-th variable
- constrain \(W_{\gamma_{x}}\) to be diagonal
- decay rate of each input variable to be “independent”
Hidden state decay
\(\hat{h}_{t-1}=\gamma_{h_{t}} \odot h_{t-1}\).
- to capture “richer knowledge” from missingness!
- do not constrain \(W_{\gamma_h}\)
Comparison
1) \(x_{t}\) and \(h_{t-1}\) \(\rightarrow\) \(\hat{x}_{t}\) and \(\hat{h}_{t-1}\)
2) masking vector \(m_{t}\) are fed into model
- \(V_{r}, V_{r}, V\) are new parameters