
Traffic Transformer : Capturing the continuity and periodicity of TS for traffic forecasting (2020)
Contents
- Abstract
- Introduction
- Preliminaries
- Proposed Architecture
- Transformer for capturing temporal dependencies
- Continuity of TS
- Periodicity of TS
- Summary of encoding
- GCN for capturing spatial dependency
- Traffic Transformer architecture
- Transformer for capturing temporal dependencies
0. Abstract
Traffic Forecasting
-
jointly model spatio-temporal dependencies
-
(common) use GNN
Traffic Transformer
- (a) capture the (1) continuity & (2) periodicity of TS
- (b) model spatial dependency
1. Introduction
Traffic Transformer
design 4 novel positional encoding
- to encode (1) continuity & (2) periodicity
- to facilitate the modeling of temporal dependencies in traffic data
propose 7 temporal encoding methods, by combining different strategies
2. Preliminaries
Network-wide Traffic Forecasting task
- input : weighted directed graph \(\mathcal{G}=(\mathcal{V}, \mathcal{E}, \mathbf{W})\) , \(X^{t}\)
- \(\mathcal{V}\) : set of sensors with \(\mid \mathcal{V} \mid =N\)
- \(\mathcal{E}\) : set of edges connecting sensors
- \(\mathbf{W} \in \mathbb{R}^{N \times N}\) : adjacency matrix, storing the distance between sensors
- \(X^{t} \in \mathbb{R}^{N \times P}\) : feature matrix of the graph that is observed at time $$
- \(P\) : number of features
- Goal :
- predict \(H\) future steps : \(\mathcal{X}_{t+1}^{t+H}=F\left(\mathcal{G} ; \mathcal{X}_{t-(M-1)}^{t}\right)\)
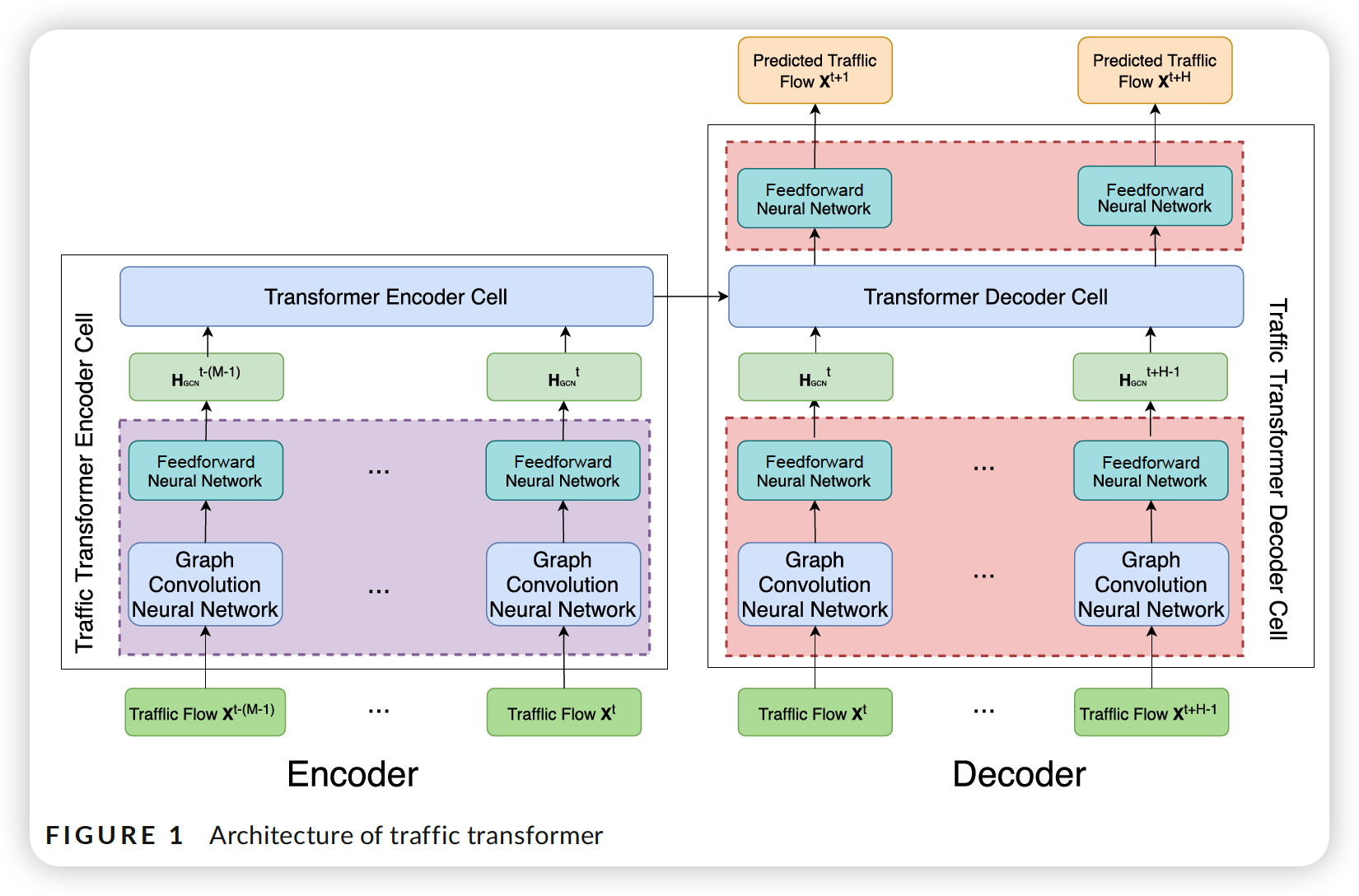
3. Proposed Architecture
- input step : [t - (M-1), \(t\) \(-(M-2), \ldots, t]\)
- output step : \([t+1, t+2, \ldots, t+H]\)
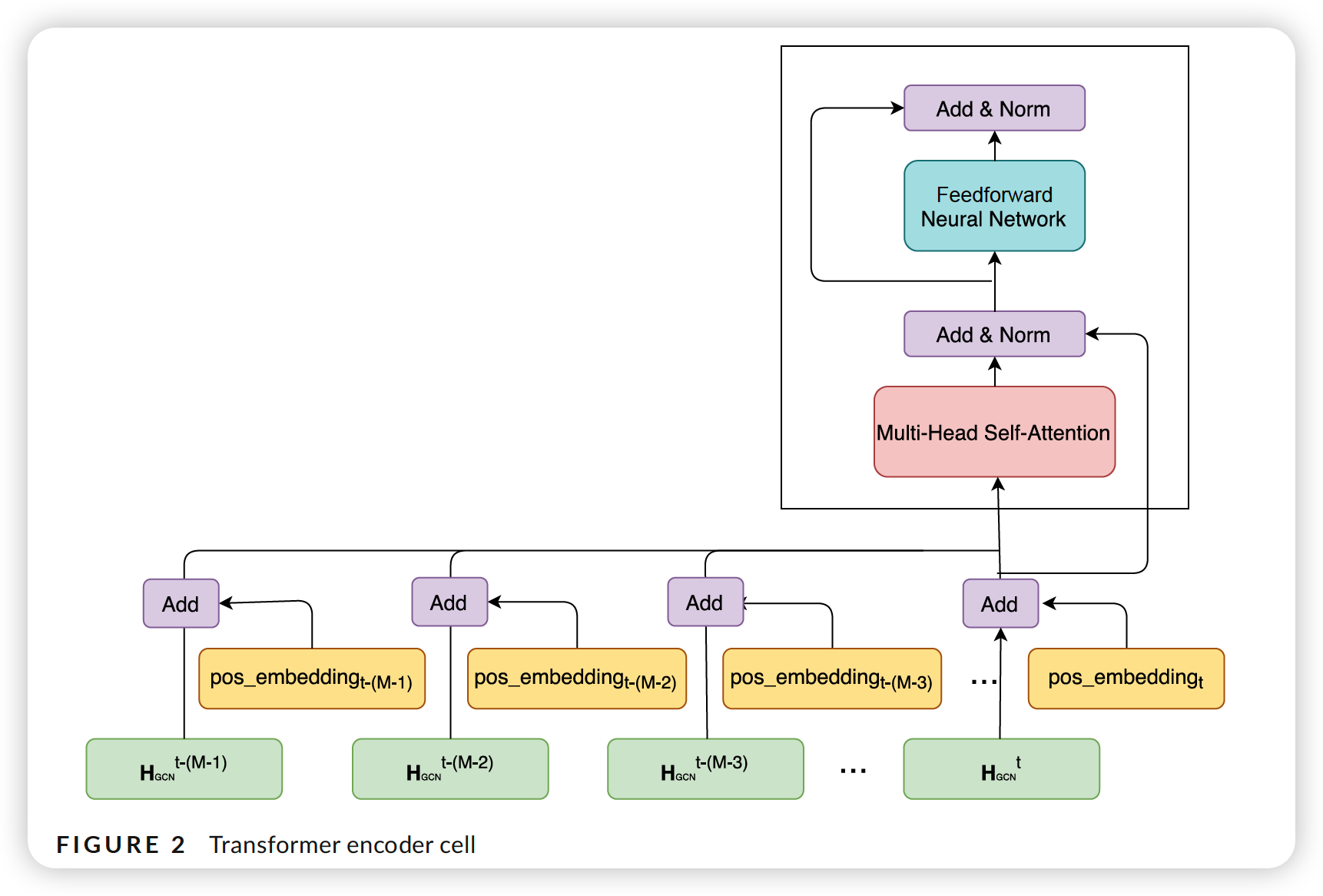
3-1. Transformer for capturing temporal dependencies
a) Continuity of TS
-
Relative Position encoding
- continuity of time in the window ( not whole series )
- time step \((t-(M-1))\) = starting position ( position 0 )
-
Global Position encoding
-
problem of “Relative Position encoding” : ignores the fact that most time-steps in 2 consecutive source-target sequence pairs are common
-
thus, additionally propose a global psotion
( has only 1 position embedding, even if it appears in different sequences )
-
b) Periodicity of TS
- time seires also conveys periodicity ( weekly / daily )
- 2 ways to go about this
- (1) position encoding
- (2) using different TS segments ( correspoing to different temporal features )
- Periodic Position encoding
- ex) daily-periodic embedding
- ex) weekly-periodic position embedding
-
Time Series segment
-
ex) daily-periodic segment
- \(\mathcal{X}_{t+1}^{t+H}(D=d)=\left[\mathcal{X}_{t+1-s d}^{t+H-s d}, \mathcal{X}_{t+1-s(d-1)}^{t+H-s(d-1)}, \ldots, \mathcal{X}_{t+1-s}^{t+H-s}\right]\).
-
ex) weekly-periodic segment
- \(\mathcal{X}_{t+1}^{t+H}(W=w)=\left[\mathcal{X}_{t+1-s 7 w}^{t+H-s 7 w}, \mathcal{X}_{t+1-s 7(w-1)}^{t+H-s 7(w-1)}, \ldots, \mathcal{X}_{t+1-s 7}^{t+H-s 7}\right]\).
-
ex) hybrid segment
-
\(\left[\mathcal{X}_{t+1}^{t+H}(W), \mathcal{X}_{t+1}^{t+H}(D), \mathcal{X}_{t-(M-1)}^{t}\right]\).
-
Transformer can not determine the order information( \(\because\) attention based )
\(\rightarrow\) position encoding strategy is required!
-
-
c) Summary of encoding
-
7 different encoding methods
-
after obtaining position idexes…
-
method 1) addition-based combination
- but they have different vector space!
-
method 2) similarity-based combination
-
adjust the attention score \(a_{ij}\),
by using the similarity between 2 time steps in terms of PE
-
\(\mathbf{Y}^{i}=\sum_{j=1}^{L} a_{i j}^{\prime}\left(\mathbf{X}^{j} W_{V}\right)\).
- \(a_{i j}^{\prime}=\frac{\exp \left(e_{i j}^{\prime}\right)}{\sum_{k=1}^{L} \exp \left(e_{i k}^{\prime}\right)}\).
- \(e_{i j}^{\prime}=b_{i j} e_{i j}\).
- \(d_{i j}=\text{pos embedding}_{i} \times\left(\text{pos embedding }_{j}\right)^{T}\).
- \(e_{i j}^{\prime}=b_{i j} e_{i j}\).
- \(a_{i j}^{\prime}=\frac{\exp \left(e_{i j}^{\prime}\right)}{\sum_{k=1}^{L} \exp \left(e_{i k}^{\prime}\right)}\).
-
-
3-2. GCN for capturing spatial dependency
in spectral graph theory…
- graph is represented by its Laplacian matrix
- \(g_{\theta \mathcal{G}} \mathbf{X}=\mathbf{U}_{\theta}(\boldsymbol{\Lambda}) \mathbf{U}^{T} \mathbf{X}\).
- \(\mathbf{U} \in \mathbb{R}^{N \times N}\) : matrix of eigenvectors, decomposed from \(L\)
- \(L=I_{N}-D^{-\frac{1}{2}} A D^{-\frac{1}{2}}=U \Lambda U^{T} \in \mathbb{R}^{N \times N}\) : normalized graph Laplacian
- \(\mathbf{D} \in \mathbb{R}^{N \times N}\) : diagonal degree matrix
- \(\Lambda\) : diagonal matrix of its eigen values
- \(\mathbf{U} \in \mathbb{R}^{N \times N}\) : matrix of eigenvectors, decomposed from \(L\)
computationally expensive to directly decompose Laplacian matrix
use several approximations
-
ex) approximate \(g_{\theta}\) with truncated expansion of Chebyshev polynomials
-
adopt first-order polynomials as the GC filter
-
stack multiple NN
-
structural neighborhood information on graphs can be incorporated by DNN,
wihtout explicitly parameterizing polynomials
-
(before) \(g_{\theta \mathcal{G}} \mathbf{X}=\mathbf{U}_{\theta}(\boldsymbol{\Lambda}) \mathbf{U}^{T} \mathbf{X}\)
-
(after) \(g_{\theta}{ }_{G} \mathbf{X}=\theta_{0} \mathbf{X}-\theta_{1} \mathbf{D}^{-\frac{1}{2}} \mathbf{A} \mathbf{D}^{-\frac{1}{2}} \mathbf{X}\)
-
(after2) \(g_{\theta G} \mathbf{X}=\theta\left(\mathbf{I}_{N}+\mathbf{D}^{-\frac{1}{2}} \mathbf{A} D^{-\frac{1}{2}}\right) \mathbf{X}=\theta\left(\widehat{D}^{-\frac{1}{2}} \widehat{A} \widehat{D}^{-\frac{1}{2}}\right) \mathbf{X}\)
- to reduce the number of params,
- \(\theta\) is used to replace \(\theta_0\)
- \(\theta=\theta_{0}=-\theta_{1}\).
-
\(k\)-step truncated stationary distn \(\mathcal{P}\)
\(g_{\theta}{ }_{G} \mathbf{X}=\sum_{k=0}^{K-1}\left(\theta_{k, 1}\left(\mathbf{D}_{\text {out }}^{-1} \mathbf{W}\right)^{k}+\theta_{k, 2}\left(\mathbf{D}_{\text {in }}^{-1} \mathbf{W}^{T}\right)^{k}\right) \mathbf{X}\).
- \(\theta \in \mathbb{R}^{K \times 2}\) : parameters of bidirectional filter \(g_{\theta}\)
- \(\mathbf{D}_{\text {out }}^{-1} \mathbf{W}\) and \(\mathbf{D}_{\text {in }}^{-1} \mathbf{W}^{\top}\) are the state transition matrices of the diffusion process.
3-3. Traffic Transformer architecture
Loss Function :
\(\text { Loss }=\frac{1}{H} \sum_{t=1}^{H} \frac{1}{N} \sum_{j=1}^{N} \mid X_{j}^{t}-\hat{X}_{j}^{t} \mid\).