
Variational Inference with Tail-Adaptive f-Divergence (NeurIPS 2018)
Abstract
“VI with \(\alpha\) divergence”
- pros) mass-covering property
- cons) estimating & optimizing \(\alpha\) divergences require importance sampling, which may have large variance
Propose a new class of tail-adaptive f-divergences
- adaptively changes the convex function \(f\) with tail distn of the importance weights
- test this method on BNN
1. Introduction
success of VI depends on “proper divergence metric”
-
(usually) KL-divergence \(KL(q \mid \mid p)\)
( but, this under-estimates the variance & miss important local modes of the true posterior )
-
(alternative) f-divergence : \(D_{f}(p \mid \mid q)=\mathbb{E}_{x \sim q}\left[f\left(\frac{p(x)}{q(x)}\right)-f(1)\right]\)
- \(f: \mathbb{R}_{+} \rightarrow \mathbb{R}\) : convex function
- example) \(\alpha\)-divergence ( where \(f(t)=t^{\alpha} /(\alpha(\alpha-1))\) )
\(\alpha\)-divergence
- \(\alpha \rightarrow 0\) : KL-divergence \(KL(q \mid \mid p)\)
- \(\alpha \rightarrow 1\) : Reverse KL-divergence \(KL(p \mid \mid q)\)
- ex) expectation propagation, importance weighted auto-encoder, cross entropy method
- \(\alpha=2\) : \(\chi^2\)-divergence
Why use \(\alpha\)-divergence? MASS COVERING property
-
large values of \(\alpha\) :
-
pros) stronger mass-covering property
-
cons) high variance
( reason : involves estimating the \(\alpha\)-th power of density ratio \(\frac{p(x)}{q(x)}\))
-
-
Thus, it is desirable to design an approach to choose \(\alpha\) adaptively and automatically, as \(q\) changes during the training iterations
( according to the distribution of the ratio \(\frac{p(x)}{q(x)}\))
Propose a new class of \(f\)-divergence which is tail-adaptive!
- uses different \(f\) according to the tail distn of density ratio \(\frac{p(x)}{q(x)}\)
- derive new adaptive \(f\)-divergence based VI
- Algorithm
- replaces the \(f\) function with “rank-based function” of the empirical density ratio \(w=\frac{p(x)}{q(x)}\), at each gradient descent step of q
2. f-divergence and Friends
by minimizing the \(f\)-divergence between \(q_{\theta}\) and \(p\)
-
\(\min _{\theta \in \Theta}\left\{D_{f}\left(p \mid \mid q_{\theta}\right)=\mathbb{E}_{x \sim q_{\theta}}\left[f\left(\frac{p(x)}{q_{\theta}(x)}\right)-f(1)\right],\right\}\).
-
solve this by stochastic optimization
( by approximating the expectation \(\mathbb{E}_{x \sim q_{\theta}}[\cdot]\) using samples drawing from \(q_{\theta}\) at each iteration )
\(f\)-divergence
- ( by Jensen’s inequality ) \(\mathbb{D}_{f}(p \mid \mid q) \geq 0\) for any \(p\) and \(q .\)
- if \(f(t)\) is strictly convex at \(t=1,\) then \(D_{f}(p \mid \mid q)=0\) implies \(p=q\).
different \(f\)
- if \(f(t) = - \log t\) : (normal KL)
- \(\mathrm{KL}(q \mid \mid p)=\mathbb{E}_{x \sim q}\left[\log \frac{q(x)}{p(x)}\right]\).
- if \(f(t) = t \log t\) : (reverse KL)
- \(\mathrm{KL}(p \mid \mid q)=\mathbb{E}_{x \sim q}\left[\frac{p(x)}{q(x)} \log \frac{p(x)}{q(x)}\right]\).
- if \(f_{\alpha}(t)=t^{\alpha} /(\alpha(\alpha-1))\) & \(\alpha \in \mathbb{R} \backslash\{0,1\}\) : ( \(\alpha\) divergence )
- \(D_{f_{\alpha}}(p \mid \mid q)=\frac{1}{\alpha(\alpha-1)} \mathbb{E}_{x \sim q}\left[\left(\frac{p(x)}{q(x)}\right)^{\alpha}-1\right]\).
\(\rightarrow\) \(\mathrm{KL}(q \mid \mid p)\) and \(\mathrm{KL}(p \mid \mid q)\) are the limits of \(D_{f_{\alpha}}(q \mid \mid p)\) when \(\alpha \rightarrow 0\) and \(\alpha \rightarrow 1\) respectively.
3. \(\alpha\)-divergence
Mass-covering property!
-
reason : \(\alpha\)-divergence is proportional to the \(\alpha\)-th moment of density ratio \(p(x)/q(x)\)
-
large \(\alpha\) : large values of \(p(x)/q(x)\) will be penalized….. preventing \(p(x)>>q(x)\)
-
\(\alpha \leq 0\) : \(p(x)=0\) must imply \(q(x)=0\)…. to make \(D_{f_{\alpha}}(p \mid \mid q)\) finite
- ex) \(\alpha=0\) : KL-divergence
-
Large \(\alpha\)
- stronger mass-covering properties
- also increase the variance

- desirable to keep \(\alpha\) large
- but ensure to keep \(\alpha\) smaller than \(\alpha_{*}\)
\(\rightarrow\) “estimate the tail index \(\alpha^{*}\) empirically at each iteration!”
4. Hessian-based Representation of \(f\)-Divergence
designing a generalization of \(f\)-divergence, in which \(f\) adaptively changes with \(p\) and \(q\)
- achieve strong mass-covering! ( equivalent to that of the \(\alpha\)-divergence with \(\alpha = \alpha^*\) )
- challenge of such adaptive \(f\)?
- convex constraint over \(f\) is difficult to express computationally
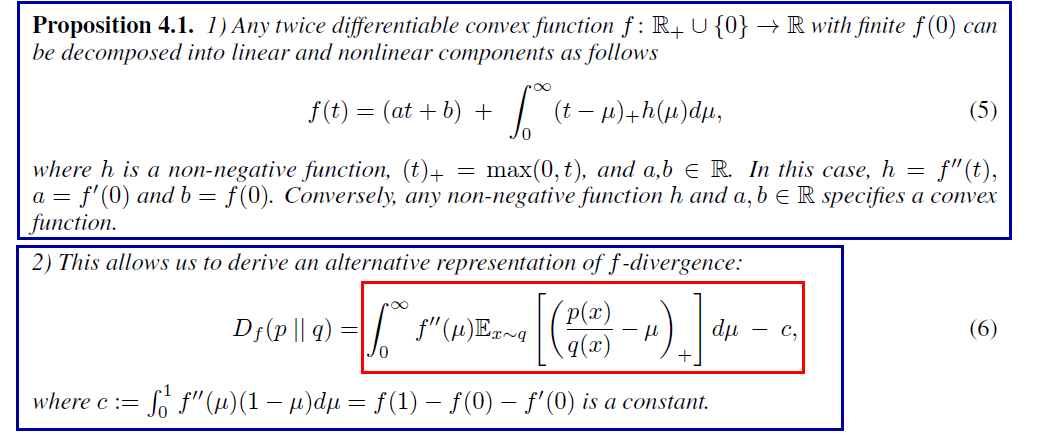
Specify a convex function \(f\) through \(f''\)
-
this suggest that all \(f\)-divergences are conical combiations of a set of special \(f\)-divergences
of form \(\mathbb{E}_{x \sim q}\left[(p(x) / q(x)-\mu)_{+}-f(1)\right] \text { with } f(t)=(t-\mu)_{+}\)
actually, we are more concerned in calculating the gradient ( rather than \(f\)-divergence itself )
\(\rightarrow\) gradients of \(\mathbb{D}_{f}\left(p \mid \mid q_{\theta}\right)\) is directly related to Hessian \(f''\)
Two ways of finding gradients
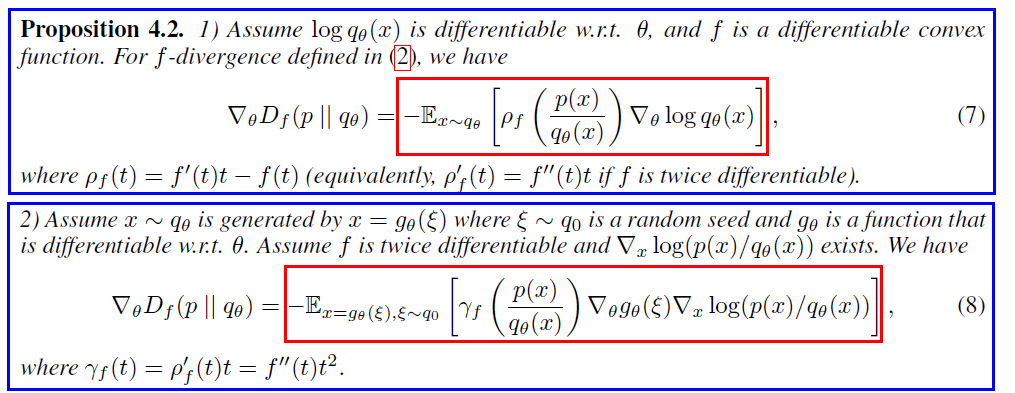
Gradient of \(f\)-divergence depends on \(f\) through \(\rho_f\) ( or \(\gamma_f\) )
- ex) \(\alpha\) divergence :
- \[f(t)=t^{\alpha} /(\alpha(\alpha-1))\]
- \[\rho_{f}(t)=t^{\alpha} / \alpha\]
- \[\gamma_{f}(t)=t^{\alpha}\]
- ex) KL-divergence :
- \[f(t)=-\log t\]
- \[\rho_{f}(t)=\log t-1\]
- \[\gamma_{f}(t)=1\]
- ex) Reverse KL-divergence :
- \[f(t)=t \log t\]
- \[\rho_{f}(t)=t\]
- \[\gamma_{f}(t)=t\]
-
eq (7) : score-function gradient
- gradient free ( does not require calculating the gradient of \(p(x)\) )
-
eq (8) : reparameterization gradient
-
gradient based ( involves \(\nabla_{x} \log p(x)\) )
-
has been shown that (8) is better than (7), because it leverages the gradient information \(\nabla_{x} \log p(x)\)
& yields a lower variance estimator
-
5. Safe \(f\)-divergence with Inverse Tail Probability
It is sufficient to find an increasing function \(\rho_f\) ( or non-neg function \(\gamma_f\) ) to obtain adaptive \(f\)-divergence with computable gradients
To make \(f\)-divergence safe…..
- 1) need to find \(\rho_f\) or \(\gamma_f\) that adaptively depends on \(p\) and \(q\)
- 2) \(\mathbb{E}_{x \sim q}[\rho(p(x) / q(x))]<\infty\)
- 3) keep the function large ( to provide strong mode-covering property )
INVERSE of the tail probability achieves these 1)~3)!
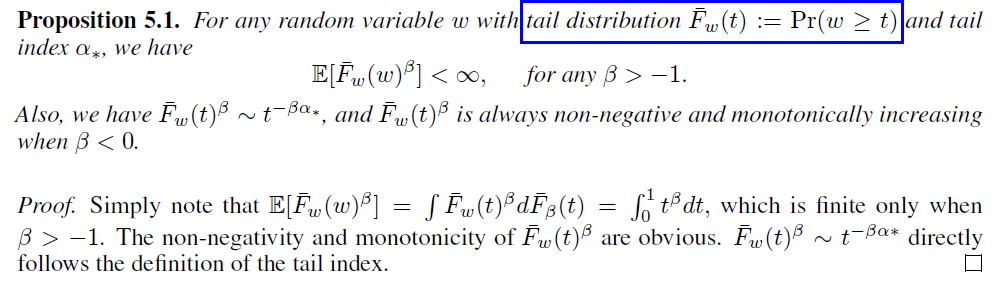
motivates to use “ \(\bar{F}_{w}(t)^{\beta}\) to define \(\rho_f\) ( or \(\gamma_f\) )”
- yields 2 versions of “safe” tail-adaptive \(f\)-divergence
6. Algorithm Summary
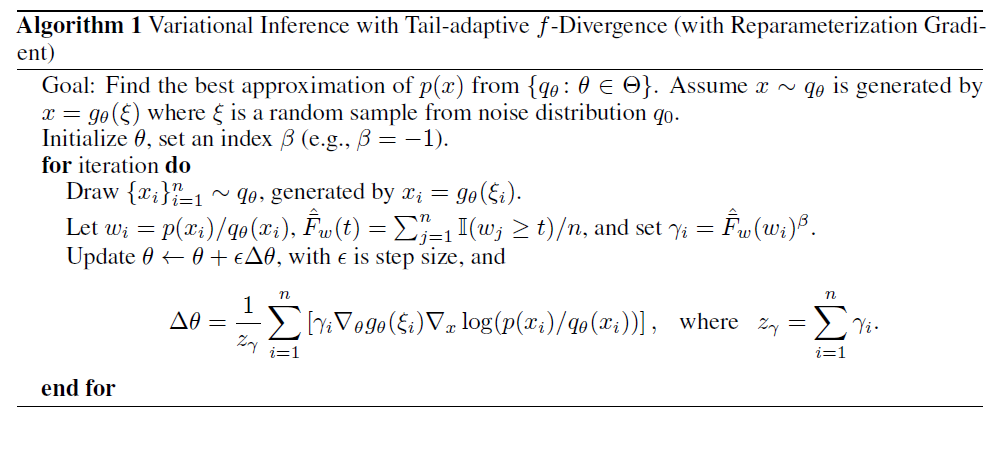
explicit form of \(\bar{F}_{w}(t)^{\beta}\) is unknown…. approximate it based on “empirical data” ( drawn from \(q\) )!
\(\rightarrow\) Let \(\left\{x_{i}\right\}\) be drawn from \(q\) and \(w_{i}=p\left(x_{i}\right) / q\left(x_{i}\right),\)
\(\rightarrow\) then we can approximate the tail probability with \(\hat{\bar{F}}_{w}(t)=\frac{1}{n} \sum_{i=1}^{n} \mathbb{I}\left(w_{i} \geq t\right) .\)
Compared with typical VI with reparameterized gradients….. this methods assings a
-
WEIGHT \(\rho_{i}=\hat{F}_{w}\left(w_{i}\right)^{\beta}\)
( which is proportional \(\# w_{i}^{\beta}\), where \(\# w_{i}\) denotes the rank of data \(w_i\) )
- when taking \(-1<\beta<0\), this allows us to penalize places with high ratio \(p(x) / q(x)\), but avoid to be overly aggressive
- (in practice) use \(\beta=-1\)
7. Conclusion
present a new class of tail-adaptive \(f\)-divergence & exploit its application in VI & RL
compared to classic \(\alpha\)-divergence, our approach guarantees finite moments of density ratio & provides more stable importance weights & gradient estimates