
A Simple Baseline for Bayesian Uncertainty in Deep Learning ( NeurIPS 2019 )
Abstract
SWAG ( =SWA-Gaussian ) : simple, scalable, general purpose approach for…
- (1) uncertainty representation
- (2) calibration in deep learning
1. Introduction
Representing Uncertainty is crucial.
This paper…
- use the information contained in the SGD trajectory to efficiently approximate the posterior distn over the weights of NN
- find that “Gaussian distn” fitted to the first 2 moments of SGD captures the local geometry of posterior!
2. Related Work
2-1. Bayesian Methods
MCMC
- HMC (Hamiltonian Monte Carlo)
- SGHMC (stochastic gradient HMC)
- allows for stochastic gradients to be used in Bayesian Inference
- (crucial for both scalability & exploring a space of solutions to provide good generalization)
- SGLD (stochastic gradient Langevin dynamics)
Variational Inference
- Reparameterization Trick
Dropout Variational Inference
- spike and slab variational distribution
- optimize dropout probabilities as well
Laplace Approximation
- assume a Gaussian posterior, \(\mathcal{N}\left(\theta^{*}, \mathcal{I}\left(\theta^{*}\right)^{-1}\right)\).
- \(\mathcal{I}\left(\theta^{*}\right)^{-1}\) : inverse of the Fisher information matrix
2-2. SGD based approximation
- averaged SGD as an MCMC sampler
2-3. Methods for Calibration of DNNs
(SSDE) Ensembles of several networks
3. SWA-Gaussian for Bayesian Deep Learning
propose SWAG for Bayesian model averaging & uncertainty estimation
3-1. Stochastic Gradient Descnet (SGD)
standard training of DNNs
\(\Delta \theta_{t}=-\eta_{t}\left(\frac{1}{B} \sum_{i=1}^{B} \nabla_{\theta} \log p\left(y_{i} \mid f_{\theta}\left(x_{i}\right)\right)-\frac{\nabla_{\theta} \log p(\theta)}{N}\right)\).
- loss function : NLL & regularizer
- NLL : \(-\sum_{i} \log p\left(y_{i} \mid f_{\theta}\left(x_{i}\right)\right)\)
- regularizer : \(\log p(\theta)\)
3-2. Stochastic Weight Averaging (SWA)
main idea of SWA
-
run SGD with a constant learning rate schedule,
starting from a pre-trained solution & average the weights
-
\(\theta_{\text {SWA }}=\frac{1}{T} \sum_{i=1}^{T} \theta_{i}\).
3-3. SWAG-Diagonal
simple diagonal format for the covariance matrix.
maintain a running average of the 2nd uncentered moment for each weight,
then compute the covariance using the following standard identity at the end of training:
- \(\overline{\theta^{2}}=\frac{1}{T} \sum_{i=1}^{T} \theta_{i}^{2}\) .
- \(\Sigma_{\text {diag }}=\operatorname{diag}\left(\overline{\theta^{2}}-\theta_{\text {SWA }}^{2}\right)\).
- Approximate posterior distribution : \(\mathcal{N}\left(\theta_{\mathrm{SWA}}, \Sigma_{\text {Diag }}\right)\)
3-4. SWAG : Low Rank plus Diagonal Covariance Structure
full SWAG algorithm
- diagonal covariance approximation : TOO restrictive
- more flexible low-rank plus diagonal posterior approximation
sample covariance matrix of SGD :
-
sum of outer products
-
\(\Sigma=\frac{1}{T-1} \sum_{i=1}^{T}\left(\theta_{i}-\theta_{\mathrm{SWA}}\right)\left(\theta_{i}-\theta_{\mathrm{SWA}}\right)^{\top}\) ( rank = \(T\) )
- but don’t know \(\theta_{SWA}\) during training
-
\(\Sigma \approx \frac{1}{T-1} \sum_{i=1}^{T}\left(\theta_{i}-\bar{\theta}_{i}\right)\left(\theta_{i}-\right.\left.\bar{\theta}_{i}\right)^{\top}=\frac{1}{T-1} D D^{\top}\).
-
where \(D\) is the deviation matrix comprised of columns \(D_{i}=\left(\theta_{i}-\bar{\theta}_{i}\right)\)
and \(\bar{\theta}_{i}\) is the running estimate of the parameters’ mean obtained from the first \(i\) samples
-
Combine (1) & (2)
- (1) low-rank approximation : \(\Sigma_{\text {low-rank }}=\frac{1}{K-1} \cdot \widehat{D} \widehat{D}^{\top}\)
- (2) diagonal approximation : \(\Sigma_{\text {diag }}=\operatorname{diag}\left(\overline{\theta^{2}}-\theta_{\text {SWA }}^{2}\right)\)
\(\rightarrow\) \(\mathcal{N}\left(\theta_{\text {SWA }}, \frac{1}{2} \cdot\left(\Sigma_{\text {diag }}+\Sigma_{\text {low-rank }}\right)\right)\).
To sample from SWAG, we use….
-
\(\tilde{\theta}=\theta_{\mathrm{SWA}}+\frac{1}{\sqrt{2}} \cdot \Sigma_{\mathrm{diag}}^{\frac{1}{2}} z_{1}+\frac{1}{\sqrt{2(K-1)}} \widehat{D} z_{2}\).
where \(z_{1} \sim \mathcal{N}\left(0, I_{d}\right), z_{2} \sim \mathcal{N}\left(0, I_{K}\right)\).
Full Algorithm
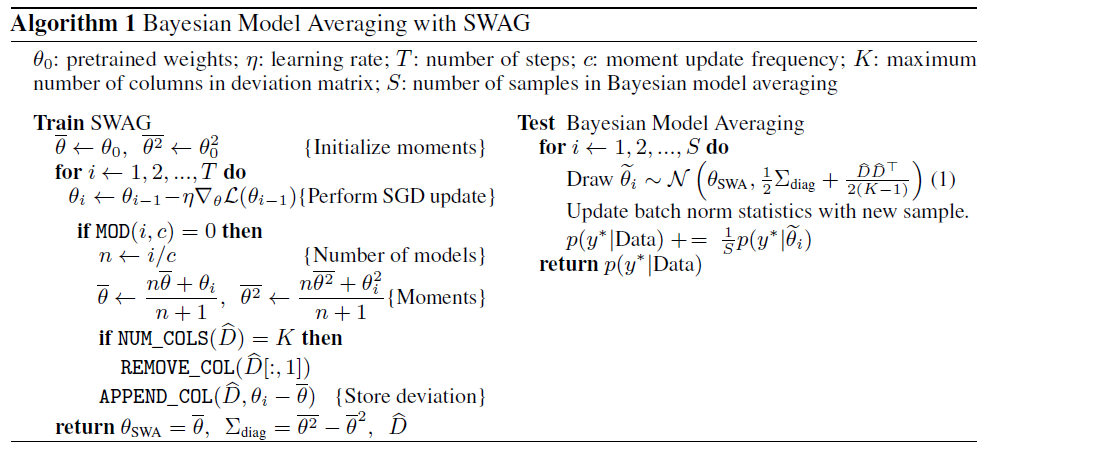
3-5. Bayesian Model Averaging with SWAG
MAP
- posterior \(\log p(\theta \mid \mathcal{D})=\log p(\mathcal{D} \mid \theta)+\log p(\theta)\).
- prior \(p(\theta)\) : regularization in optimization
Bayesian procedure “marginalizes” the posterior over \(\theta\)
-
\(p\left(y_{*} \mid \mathcal{D}, x_{*}\right)=\int p\left(y_{*} \mid \theta, x_{*}\right) p(\theta \mid \mathcal{D}) d \theta\).
-
using MC sampling…
\(p\left(y_{*} \mid \mathcal{D}, x_{*}\right) \approx \frac{1}{T} \sum_{t=1}^{T} p\left(y_{*} \mid \theta_{t}, x_{*}\right), \quad \theta_{t} \sim p(\theta \mid \mathcal{D})\).
Prior Choice
-
(typically) weight decay is used to regularize DNN
-
when SGD is used with momentum \(\rightarrow\) implicit regularization