
Bayesian Adversarial Learning (NeurIPS 2018)
Abstract
DNN : vulnerable to adversarial attacks
\(\rightarrow\) popular defense : “robust optimization problem”
( = minimizes a “point estimate” of worst-case loss )
BUT, point estimate ignores potential test adversaries that are beyond pre-defined constraints
This paper proposes Bayesian Robust Learning
- “distribution” ( instead of point estimate ) is put on the adversarial data-generating distribution to account for the uncertainty of the adversarial data-generating process
1. Introduction
DL : vulnerable to maliciously manipulated & imperceptible perturbation over original data
- ex) “ADVERSARIAL EXAMPLES”
- security-sensitive scenarios!
Adversarial training
- generated adversarial examples are fet to NN as augmented data, to enhance robustness
Distributionally robust optimization problem
- idea : ‘minimize the worst-case loss’ w.r.t perturbed data distribution
Most existing robust learning approaches solve a “point estimate” of either
- worst-case per-datum perturbation
- adversary data-generating distribution
Novel Framework for robust learning, BAYESIAN ADVERSARIAL LEARNING (BAL)
2. Bayesian Adversarial Learning
2 players : (1) data generator & (2) learner
(1) data generator
- modify training data \(D\) into perturbed on \(\tilde{D}\)
- fool the learner’s prediction
(2) learner
- tries to predict best on the \(\tilde{D}\)
Introduce fully Bayesian treatment of both (1) & (2)
-
put an energy-based pdf over \(\tilde{D}\)
( = distribution over data distribution, to quantify “uncertainty” of data generating process )
-
\(p(\tilde{\mathcal{D}} \mid \boldsymbol{\theta}, \mathcal{D}) \propto \exp \{L(\tilde{\mathcal{D}} ; \boldsymbol{\theta})-\alpha c(\tilde{\mathcal{D}}, \mathcal{D})\}\).
- loss function \(L(\tilde{\mathcal{D}} ; \boldsymbol{\theta})\) : predicting on the perturbed data \(\tilde{\mathcal{D}}\) given the learner’s strategy \(\boldsymbol{\theta}\)
- high loss \(\rightarrow\) high energy
- cost \(c(\tilde{\mathcal{D}}, \mathcal{D})\) : cost of modifying \(D\) to \(\tilde{D}\)
- high cost \(\rightarrow\) low energy
- \(\alpha\) : hyperparameter
- loss function \(L(\tilde{\mathcal{D}} ; \boldsymbol{\theta})\) : predicting on the perturbed data \(\tilde{\mathcal{D}}\) given the learner’s strategy \(\boldsymbol{\theta}\)
Learner samples its model parameter \(\theta\)
- \(p(\boldsymbol{\theta} \mid \tilde{\mathcal{D}}) \propto \exp \{-L(\tilde{\mathcal{D}} ; \boldsymbol{\theta})\} p(\boldsymbol{\theta} \mid \beta)\).
-
\(p(\boldsymbol{\theta} \mid \beta)\): prior
-
\(\beta\) : hyperparameter
-
by BAL, obtain robust posterior over learner’s parameter \(\theta\)
( by Gibbs sampling )
-
\(p(\tilde{\mathcal{D}} \mid \boldsymbol{\theta}, \mathcal{D}) \propto \exp \{L(\tilde{\mathcal{D}} ; \boldsymbol{\theta})-\alpha c(\tilde{\mathcal{D}}, \mathcal{D})\}\).
\(p(\boldsymbol{\theta} \mid \tilde{\mathcal{D}}) \propto \exp \{-L(\tilde{\mathcal{D}} ; \boldsymbol{\theta})\} p(\boldsymbol{\theta} \mid \beta)\).
-
at \(i^{th}\) iteration…
- \(\tilde{\mathcal{D}}^{(t)} \mid \boldsymbol{\theta}^{(t-1)}, \mathcal{D} \sim p\left(\tilde{\mathcal{D}} \mid \boldsymbol{\theta}^{(t-1)}, \mathcal{D}\right)\).
- \(\boldsymbol{\theta}^{(t)} \mid \tilde{\mathcal{D}}^{(t)} \sim p\left(\boldsymbol{\theta} \mid \tilde{\mathcal{D}}^{(t)}\right)\).
-
after burn-in period, collected sample \(\left\{\boldsymbol{\theta}^{(T)}, \tilde{\mathcal{D}}^{(T)}\right\}\) follows the “joint posterior” \(p(\boldsymbol{\theta}, \tilde{\mathcal{D}} \mid \mathcal{D})\).
( different from existing approaches using “point estimate” )
-
TEST time : prediction w.r.t the posterior
\(p\left(y_{*} \mid \mathbf{x}_{*}, \mathcal{D}\right)=\int p\left(y_{*} \mid \mathbf{x}_{*}, \boldsymbol{\theta}\right) p(\boldsymbol{\theta} \mid \mathcal{D}) d \boldsymbol{\theta} \approx \frac{1}{T} \sum_{t=1}^{T} p\left(y_{*} \mid \mathbf{x}_{*}, \boldsymbol{\theta}^{(t)}\right), \quad \boldsymbol{\theta}^{(t)} \sim p(\boldsymbol{\theta} \mid \mathcal{D})\).
To make BAL framework practical… have to specify
- 1) how to generate \(\tilde{D}\) based on \(D\)
- 2) configuration of the cost function \(c(\tilde{D},D)\)
- 3) learner’s model family \(f(\mathbf{x} ; \theta)\) and \(p(y \mid f(\mathbf{x} ; \theta))\)
3. A Practical Instantiation of BAL
3-1. Data Generator
Data generator :
- only modifies input
- \(p(\tilde{\mathcal{D}} \mid \boldsymbol{\theta}, \mathcal{D})=p(\tilde{\mathbf{X}} \mid \boldsymbol{\theta}, \mathbf{X})=\prod_{i=1}^{N} p\left(\tilde{\mathbf{x}}_{i} \mid \boldsymbol{\theta}, \mathbf{x}_{i}\right) \propto \exp \left\{\sum_{i=1}^{N} \ell\left(\tilde{\mathbf{x}}_{i} ; \boldsymbol{\theta}\right)-\alpha \sum_{i=1} c\left(\tilde{\mathbf{x}}_{i}, \mathbf{x}_{i}\right)\right\}\)… eq (A)
- loss function \(L(\cdot)\)
- negative log likelihood …. \(\ell(\tilde{\mathbf{x}} ; \boldsymbol{\theta})=-\log p(y \mid f(\tilde{\mathbf{x}} ; \boldsymbol{\theta}))\)
- cost function
- L2 distance … \(c(\tilde{\mathbf{x}}, \mathbf{x})= \mid \mid \tilde{\mathbf{x}}-\mathbf{x} \mid \mid _{2}^{2}\)
- loss function \(L(\cdot)\)
Key difference from existing robust optimization method :
-
instead of finding a single worst-case perturbed data,
probability distribution is put over the generated data distn
-
thus, can fully capture all possible cases of generated data
\(\rightarrow\) enhance learner’s robustness
3-2. Learner
given generated \(\tilde{X}\), leaner provides optimal \(\theta\) by sampling from below conditional distn :
- \(p(\boldsymbol{\theta} \mid \tilde{\mathbf{X}}) \propto \exp \left\{-\sum_{i=1}^{N} \ell\left(\tilde{\mathbf{x}}_{i} ; \boldsymbol{\theta}\right)\right\} p(\boldsymbol{\theta} \mid \beta)\)… eq (B)
3-3. Iterative Gibbs sampling
eq (A) & eq (B)
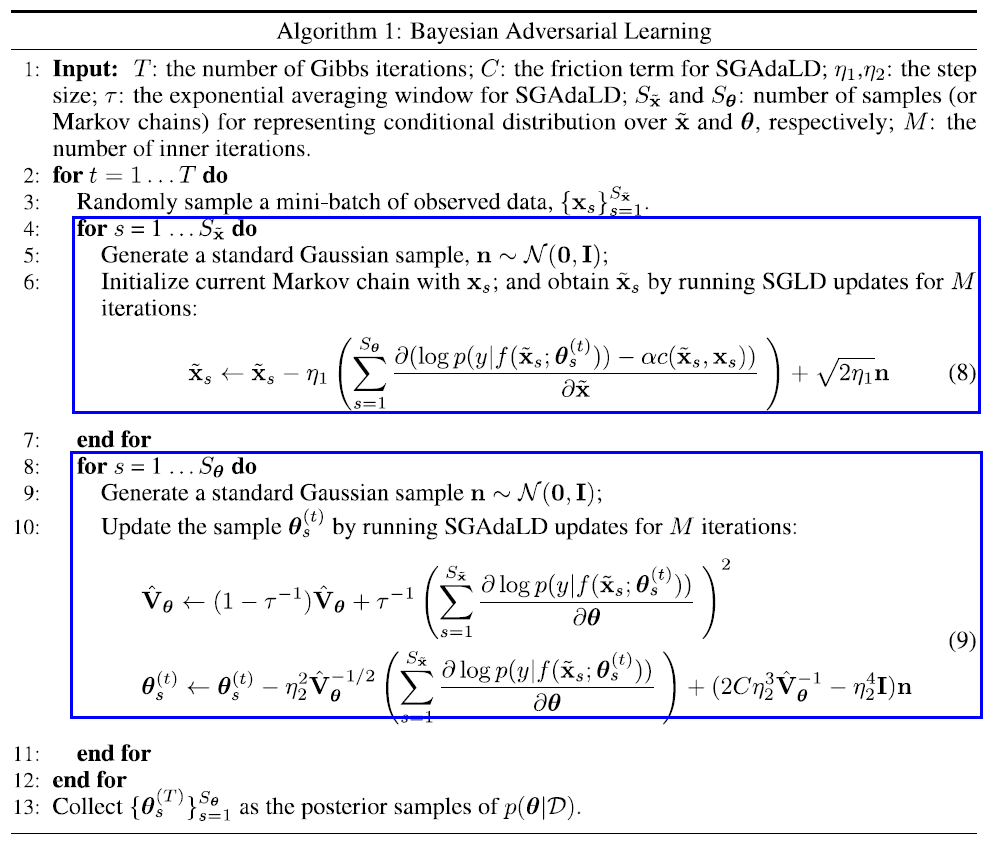
4. Algorithm
4-1. Scalable Sampling
(a) when sampling fake data
sampling full data from \(p(\tilde{\mathbf{X}} \mid \boldsymbol{\theta}, \mathbf{X})\) is expensive
\(\rightarrow\) thus resort to stochastic optimization
- sample mini-batch \(\{\tilde{\mathbf{x}}\}_{s=1}^{S_{\tilde{\mathbf{x}}}}\)
- use SGLD ( Stochastic Gradient Langevin Dynamics ) to achieve scalable sampling
(b) when sampling the posterior of model params
naive SGHMC sampler cannot efficiently explore the target density, due to high correlation
\(\rightarrow\) use
- for simplicity, do not use momentum term \(\rightarrow\) SGAdaLD
- \(\boldsymbol{\theta} \leftarrow \boldsymbol{\theta}-\eta^{2} \hat{\mathbf{V}}_{\boldsymbol{\theta}}^{-1 / 2} \mathbf{g}_{\boldsymbol{\theta}}+\mathcal{N}\left(0,2 C \eta^{3} \hat{\mathbf{V}}_{\boldsymbol{\theta}}^{-1}-\eta^{4} \mathbf{I}\right)\).
4-2. Connection to other defensive methods
characteristics of BAL by comparing with otehrs
- 1) fully Bayesian Approach
- 2) BNN also constructs posterior distn over \(\theta\), but BAL yields stronger robustness
- 3) Bayesian GAN : proposed for generative modeling, not adversarial learning
5. Conclusion
proposed adversarial training method, Bayesian Adversarial Learning(BAL)
- scalable sampling strategy
- practical safety-critical problem