
Your Contrastive Learning is Secretly Doing Stochastic Neighbor Embedding
Contents
- Abstract
- Introduction
- Preliminary & Related Work
- Notations
- SNE (Stochastic neighbor embedding)
- SSCL (Self-supervised contrastive learning)
- SNE perspective of SSCL
- Analysis
0. Abstract
SSCL (Self-Supervised Contrastive Learning)
- extract powerful features from UN-labeled data
This paper :
- unconver connection between SSCL & SNE
In the persepective of SNE…
- (goal of SNE) match pairwise distance
- SSCL = special case with the input space pairwise distance specified by constructed “postive pairs” from data augmentation
1. Introduction
SSCL : updated by encouraging …
-
the positive pairs close to each other
-
the negative pairs away
BUT…theoretical understadning is under-explored
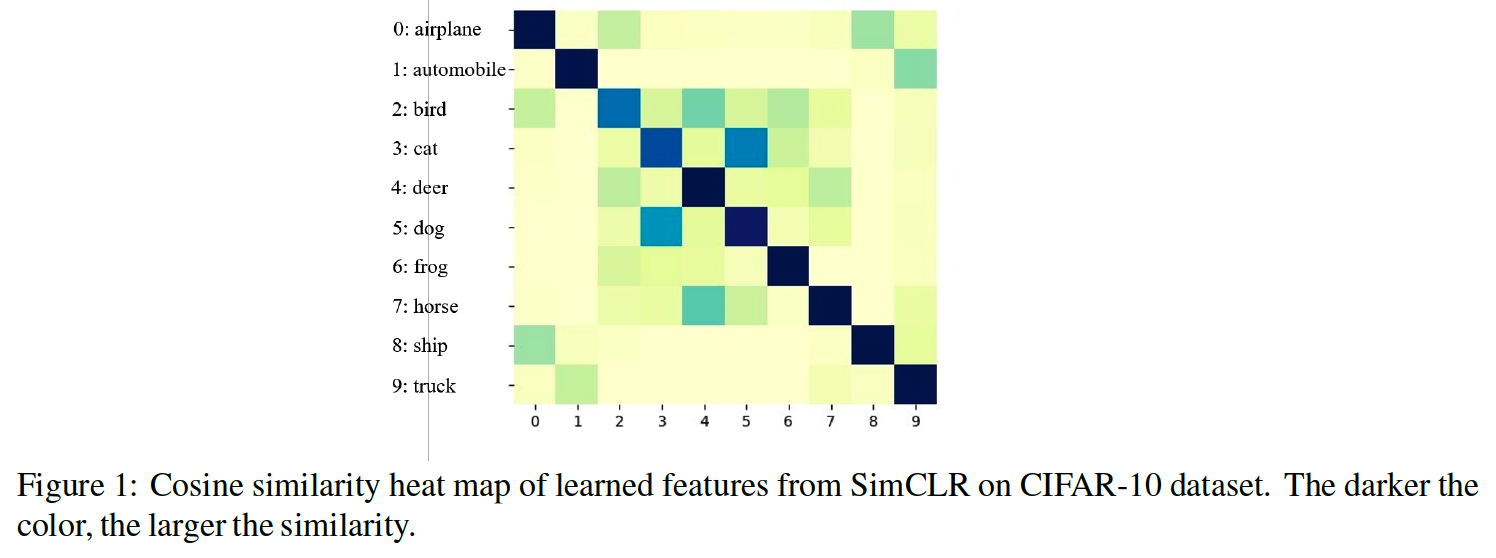
[ Similarity Heatmap of features learned by SimCLR ]
Contributions
-
(1) propose a novel perspective that interprets SSCL methods as a type of SNE methods,
with the aim of preserving pairwise similarities specified by the data augmentation.
-
(2) provide novel theoretical insgihts for domain-agnostic data augmentation & implicit biases
- 2-1) Isotropic random noise augmentations : induces \(l_2\) similarity
- 2-2) Mixup noise : adapt to low-dim structures of data
-
(3) propose several modifications to existing SSCL methods
2. Preliminary & Related Work
(1) Notations
For a function \(f: \Omega \rightarrow \mathbb{R}\) ….
- \(\mid \mid f \mid \mid _{\infty}=\sup _{\boldsymbol{x} \in \Omega} \mid f(\boldsymbol{x}) \mid\).
- \(\mid \mid f \mid \mid _{p}=\left(\int_{\Omega} \mid f(\boldsymbol{x}) \mid ^{p} d \boldsymbol{x}\right)^{1 / p}\).
For a vector \(\boldsymbol{x}\) …
- \(\mid \mid \boldsymbol{x} \mid \mid _{p}\) = \(p\)-norm
Norm
- function norms : \(L_{p}\)
- vector norms : \(l_{p}\)
Probability
- \(\mathbb{P}(A)\) : probability of event \(A\)
- \(P_{z}\) : probability distribution
- \(p_z\) : density
Datasets : \(\mathcal{D}_{n}=\left\{\boldsymbol{x}_{1}, \cdots, \boldsymbol{x}_{n}\right\} \subset \mathbb{R}^{d}\)
-
each \(\boldsymbol{x}_{i}\) independently follows distribution \(P_{\boldsymbol{x}}\)
-
low dim version : \(\boldsymbol{z}_{1}, \cdots, \boldsymbol{z}_{n} \in \mathbb{R}^{d_{z}}\)
( goal : find informative low-dimensional features \(\boldsymbol{z}_{1}, \cdots, \boldsymbol{z}_{n} \in \mathbb{R}^{d_{z}}\) of \(\mathcal{D}_{n}\) )
Feature Mapping : \(f(\boldsymbol{x})\)
- from \(\mathbb{R}^{d} \rightarrow \mathbb{R}^{d_{z}}\), i.e., \(\boldsymbol{z}_{i}=f\left(\boldsymbol{x}_{i}\right)\)
(2) SNE (Stochastic neighbor embedding)
Goal :
- map high-dim to low-dim, while preserving as much neighboring information as possible
Neighboring information :
- captured by pairwise relationships
Training process :
- step 1) DATA space
- calculate the pairwise similarity matrix \(\boldsymbol{P} \in \mathbb{R}^{n \times n}\) for \(\mathcal{D}_{n}\)
- step 2) FEATURE space
- optimize features \(\boldsymbol{z}_{1}, \cdots, \boldsymbol{z}_{n}\) such that their pairwise similarity matrix \(\boldsymbol{Q} \in \mathbb{R}^{n \times n}\) matches \(\boldsymbol{P}\).
(Hinton and Roweis, 2002)
-
pairwise similarity = conditional probabilities of \(\boldsymbol{x}_{j}\) being the neighbor of \(\boldsymbol{x}_{i}\)
( induced by a Gaussian distribution centered at \(\boldsymbol{x}_{i}\), i.e., when \(i \neq j\) )
-
DATA space : \(P_{j \mid i}\)
- \(P_{j \mid i}=\frac{\exp \left(-d\left(\boldsymbol{x}_{i}, \boldsymbol{x}_{j}\right)\right)}{\sum_{k \neq i} \exp \left(-d\left(\boldsymbol{x}_{i}, \boldsymbol{x}_{k}\right)\right)}\).
-
FEATURE space : \(Q_{j \mid i}\)
KL-divergence between \(P\) & \(Q\)
( = overall training objective for SNE )
- \(\inf _{\boldsymbol{z}_{1}, \cdots, \boldsymbol{z}_{n}} \sum_{i=1}^{n} \sum_{j=1}^{n} P_{j \mid i} \log \frac{P_{j \mid i}}{Q_{j \mid i}}\).
Improvement : t-SNE
- modifications
- (1) conditional dist \(\rightarrow\) joint distn
- (2) Gaussian \(\rightarrow\) \(t\)-distn
- \(Q_{i j}=\frac{\left(1+ \mid \mid \boldsymbol{z}_{i}-\boldsymbol{z}_{j} \mid \mid _{2}^{2}\right)^{-1}}{\sum_{k \neq l}\left(1+ \mid \mid \boldsymbol{z}_{k}-\boldsymbol{z}_{l} \mid \mid _{2}^{2}\right)^{-1}}\).
- ( for more about t-SNE … https://seunghan96.github.io/ml/stat/t-SNE/ )
(3) SSCL (Self-supervised contrastive learning)
Key Part : construction of POSITIVE pairs
( = different views of same sample )
Data Augmentation : \(\boldsymbol{x}_{i}^{\prime}=t\left(\boldsymbol{x}_{i}\right)\)
Augmented Datasets : \(\mathcal{D}_{n}^{\prime}=\left\{\boldsymbol{x}_{1}^{\prime}, \cdots, \boldsymbol{x}_{n}^{\prime}\right\}\)
Loss Function : \(l\left(\boldsymbol{x}_{i}, \boldsymbol{x}_{i}^{\prime}\right)=-\log \frac{\exp \left(\operatorname{sim}\left(f\left(\boldsymbol{x}_{i}\right), f\left(\boldsymbol{x}_{i}^{\prime}\right)\right) / \tau\right)}{\sum_{x \in \mathcal{D}_{n} \cup \mathcal{D}_{n}^{\prime} \backslash\left\{\boldsymbol{x}_{i}\right\}} \exp \left(\operatorname{sim}\left(f\left(\boldsymbol{x}_{i}\right), f(\boldsymbol{x})\right) / \tau\right)}\).
- \(\operatorname{sim}\left(\boldsymbol{z}_{1}, \boldsymbol{z}_{2}\right)=\left\langle\frac{\boldsymbol{z}_{1}}{ \mid \mid \boldsymbol{z}_{1} \mid \mid _{2}}, \frac{\boldsymbol{z}_{2}}{ \mid \mid \boldsymbol{z}_{2} \mid \mid _{2}}\right\rangle\) .
InfoNCE : \(L_{\text {InfoNCE }}:= \frac{1}{2 n} \sum_{i=1}^{n}\left(l\left(\boldsymbol{x}_{i}, \boldsymbol{x}_{i}^{\prime}\right)+l\left(\boldsymbol{x}_{i}^{\prime}, \boldsymbol{x}_{i}\right)\right)\)
3. SNE perspective of SSCL
SimCLR = special SNE model
- datsaet : \(\widetilde{\mathcal{D}}_{2 n}=\mathcal{D}_{n} \cup \mathcal{D}_{n}^{\prime}\)
- \(\widetilde{\boldsymbol{x}}_{2 i-1}=\boldsymbol{x}_{i}\) and \(\widetilde{\boldsymbol{x}}_{2 i}=\boldsymbol{x}_{i}^{\prime}\) for \(i \in[n]\).
- feature space of SimCLR : unit sphere \(\mathbb{S}^{d_{z}}\)
- pairwise distance : cosine distance
- \(d\left(\boldsymbol{z}_{1}, \boldsymbol{z}_{2}\right)=1-\operatorname{sim}\left(\boldsymbol{z}_{1}, \boldsymbol{z}_{2}\right)\).
- pairwise distance : cosine distance
- for \(i \neq j\) …
- \(\widetilde{Q}_{j \mid i}=\frac{\exp \left(\operatorname{sim}\left(f\left(\widetilde{\boldsymbol{x}}_{i}\right), f\left(\widetilde{\boldsymbol{x}}_{j}\right)\right)\right.}{\sum_{k \neq i} \exp \left(\operatorname{sim}\left(f\left(\widetilde{\boldsymbol{x}}_{i}\right), f\left(\widetilde{\boldsymbol{x}}_{k}\right)\right)\right.}\)……. ( similarity in DATA space )
By taking
\(\widetilde{P}_{j \mid i}= \begin{cases}\frac{1}{2 n}, & \text { if } \widetilde{\boldsymbol{x}}_{i} \text { and } \widetilde{\boldsymbol{x}}_{i} \text { are positive pairs } \\ 0, & \text { otherwise }\end{cases}\)….. ( similarity in FEATURE space )
\(\begin{aligned} \sum_{i=1}^{2 n} \sum_{j=1}^{2 n} \widetilde{P}_{j \mid i} \log \frac{\widetilde{P}_{j \mid i}}{\widetilde{Q}_{j \mid i}} &=\sum_{k=1}^{n}\left(\widetilde{P}_{2 k-1 \mid 2 k} \log \frac{\widetilde{P}_{2 k-1 \mid 2 k}}{\widetilde{Q}_{2 k-1 \mid 2 k}}+\widetilde{P}_{2 k \mid 2 k-1} \log \frac{\widetilde{P}_{2 k \mid 2 k-1}}{\widetilde{Q}_{2 k \mid 2 k-1}}\right) \\ &=\frac{1}{2 n} \sum_{k=1}^{n}\left(-\log \left(\widetilde{Q}_{2 k-1 \mid 2 k}\right)-\log \left(\widetilde{Q}_{2 k \mid 2 k-1}\right)\right)+\log \left(\frac{1}{2 n}\right) \end{aligned}\).
- \(\widetilde{Q}_{2 k-1 \mid 2 k}=l\left(\boldsymbol{x}_{k}, \boldsymbol{x}_{k}^{\prime}\right)\).
- \(\widetilde{Q}_{2 k \mid 2 k-1}=l\left(\boldsymbol{x}_{k}^{\prime}, \boldsymbol{x}_{k}\right)\).
\(\rightarrow\) SNE objective (2.1) reduces to that of the SimCLR objective \(L_{\text {InfoNCE, }}\) ( up to a constant term only depending on \(n\) )
learning process of SSCL
also follows the two steps of SNE
- step 1) The positive pair construction specifies the similarity matrix \(\boldsymbol{P}\).
- step 2) The training process then matches \(\boldsymbol{Q}\) to \(\boldsymbol{P}\) by minimizing some divergence
SNE vs SSCL
\(P\) in SNE
- densely filled by \(l_p\) distance
- Ignores the semantic information within rich data like images and texts
\(P\) in SSCL
-
omits all traditional distances in \(R_d\)
-
only specifies semantic similarity through data augmentation
\(\rightarrow\) \(P\) is sparsely filled only by positive pairs
(1) Analysis
feature learning process of SSCL
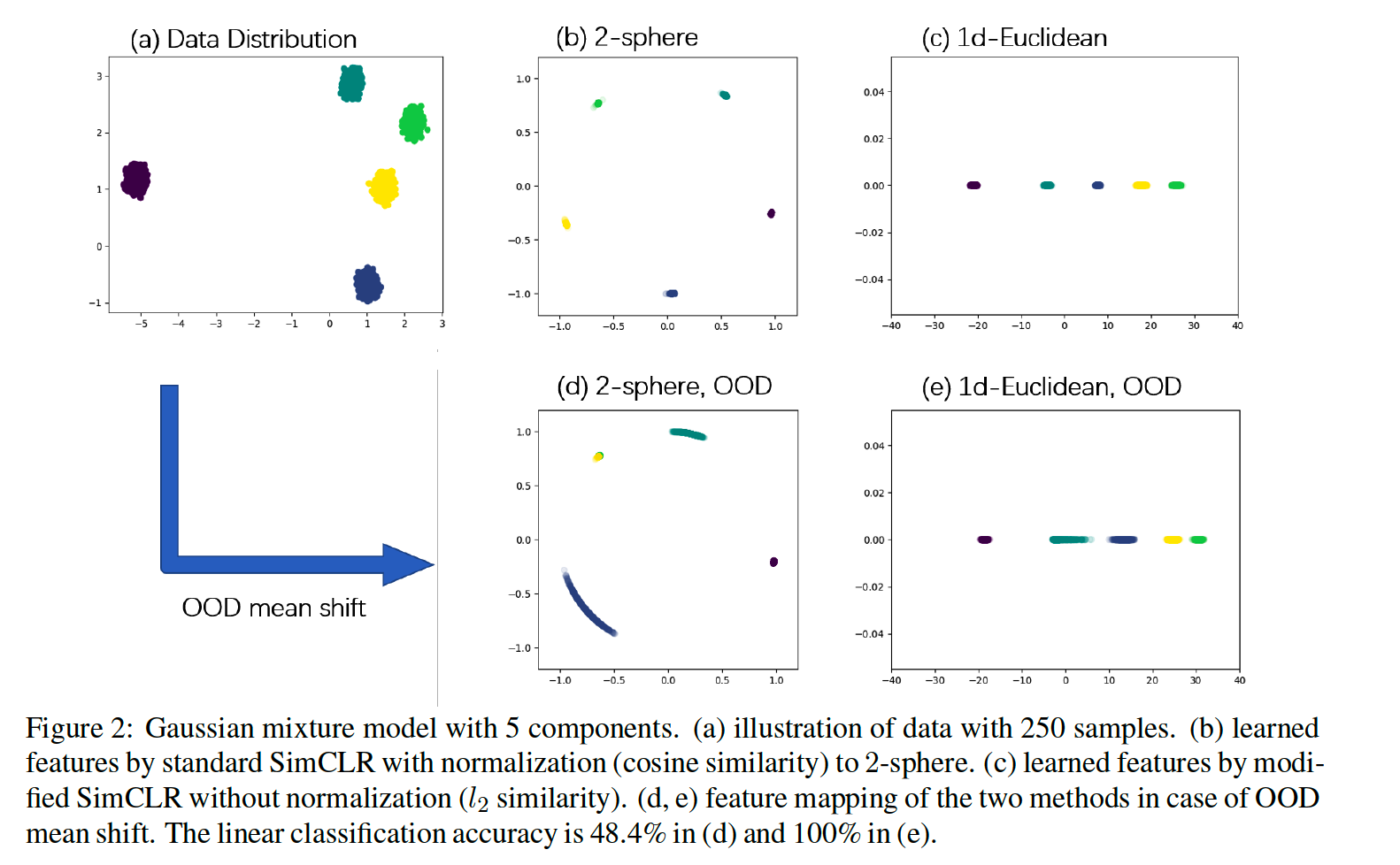
Toy dataset : Gaussian mixture setting
- \(P_{\boldsymbol{x}} \sim \frac{1}{m} \sum_{i=1}^{m} N\left(\boldsymbol{\mu}_{i}, \sigma^{2} \boldsymbol{I}_{d}\right)\).
- ex) \(d=2, m=5, \sigma=0.1\) ……. 250 independent samples
a) Alignment & Uniformity
Perfect Alignment
- \(f\left(\boldsymbol{x}_{i}\right)=f\left(\boldsymbol{x}_{i}^{\prime}\right)\) for any \(i=1, \cdots, n\)
Perfect Uniformity
- if all pairs are maximally separated on the sphere
- Tammes problem
- if \(d=2\) : mapped points form a regular polygon
- if \(d \geq n-1\) : mapped points form a (n-1) simplex
By Figure 2-a) & 2-b)…
\(\rightarrow\) perfect alignment and perfect uniformity are almost achieved by standard SimCLR in the Gaussian mixture setting.
b) Domain-agnostic DA
(1) Random Noise Augmentation
\(\boldsymbol{x}^{\prime}=\boldsymbol{x}+\delta\), where \(\delta \sim \phi(\boldsymbol{x})\).
-
pairwise similarity = \(P_{\boldsymbol{x}_{1}, \boldsymbol{x}_{2}}=\mathbb{P}\left(\boldsymbol{x}_{1}\right.\) and \(\boldsymbol{x}_{2}\) form a positive pair )
- \(P_{\boldsymbol{x}_{1}, \boldsymbol{x}_{2}}=P_{\boldsymbol{x}_{2}, \boldsymbol{x}_{1}}=\phi\left(\boldsymbol{x}_{1}-\boldsymbol{x}_{2}\right)\).
-
ex) noise distn = istoropic Gaussian
\(\rightarrow\) distance is equivalent to \(l_2\) distance in \(R^d\)
(2) Mixup
convex combinations of the training data
\(\boldsymbol{x}_{i}^{\prime}=\boldsymbol{x}_{i}+\lambda\left(\boldsymbol{x}_{j}-\boldsymbol{x}_{i}\right)\) , where \(\lambda \in(0,1)\)
-
convoluted density of \(\lambda\left(\boldsymbol{x}_{1}-\boldsymbol{x}_{2}\right)\) : \(p_{\lambda}(\boldsymbol{x})\)
-
if employing mixup for positive pairs in SSCL
\(\rightarrow\) \(P_{\boldsymbol{x}_{1}, \boldsymbol{x}_{2}}=P_{\boldsymbol{x}_{2}, \boldsymbol{x}_{1}}=p_{\lambda}\left(\boldsymbol{x}_{1}-\boldsymbol{x}_{2}\right)\)
Gaussian vs Mixup
-
data-dependent mixup > Gaussian random noise
( from the perspective of “curse of dimensionality” )
-
Setting :
- \(d\)-dimensional Gaussian mixture setting with \(m<d\) separated components.
- \(\boldsymbol{\mu}_{1}, \cdots, \boldsymbol{\mu}_{m}\) : can take up at most \((m-1)\)-dimensional linear sub-space of \(\mathbb{R}^{d}\)
[ Mixup ]
-
( for light-tailed Gaussian distribution )
- majority of samples will be close to \(S_{\mu}\)
- majority of the convoluted density \(p_{\lambda}(\boldsymbol{x})\) will also be supported on \(\boldsymbol{S}_{\mu}\)
\(\rightarrow\) distance from mixup will omit irrelevant variations in the complement of \(S_{\mu}\)
( focus on low-dim subspace \(\boldsymbol{S}_{\mu}\) )
[ Gaussian Noise ]
-
induces \(l_2\) distance for positive pairs with support of \(R^d\)
\(\rightarrow\) much more inefficient
c) Implicit bias
xx