Unsupervised Learning of Visual Features by Contrasting Cluster Assignments
Contents
- Abstract
- Introduction
- Related Work
- Instance and Contrastive Learning
- Clustering for Deep Representation Learning
- Handcrafted pretext tasks
- Method
- Online Clustering
- Multi-crop
- Main Results
- Evaluating the unsupervised features on ImageNet
- Transferring unsupervised features to downstream tasks
- Training with small batches
- Ablation Study
0. Abstract
Unsupervised Image Representations, via contrastive learning
-
usually work online
-
rely on large number of explicit pairwise feature comparison
\(\rightarrow\) computationally challenging!
SwAV
-
without requiring to compute pairwise comparison
-
simultaneously clusters the data, while enforcing consistency between cluster assignments,
produced for different augmentation of same image
( instead of comparing features directly )
-
swapped prediction
- predict the ”code” of a view from the ”representation” of another view
-
memory efficient
- does not require a large memory bank
multi-crop
- new data augmentation strategy
- mix of views with different resolutions
1. Introduction
Most of SOTA self-supervised learning
\(\rightarrow\) build upon the instance discrimination task
( each image = each class )
Instance Discrimination rely on combination of 2 elements
- (1) contrastive loss
- (2) set of image transformations
\(\rightarrow\) this paper improves both (1) & (2)
Contrastive Loss
- compares pairs of image representations
- BUT…computing pairwise \(\rightarrow\) not practical!
solutions to pairwise comparison ??
-
(1) reduce the number of comparisons to random subsets of images
-
(2) approximate the task
-
Ex) relax the instance discrimiatnion problem, using culstering-based methods
\(\rightarrow\) but does not scale well
( \(\because\) requires a pass over the ENTIRE dataset to form image codes ( =cluster assignments ) )
-
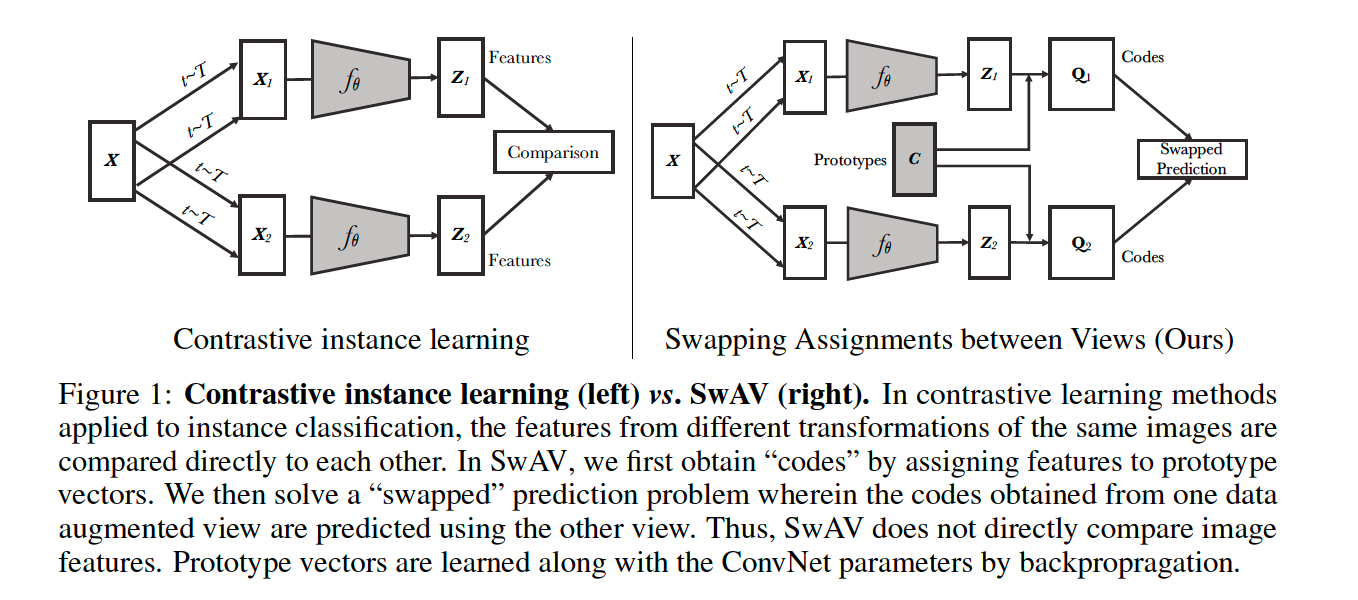
SwAV
( Swapping Assignments between multiple Views of the same image )
-
compute the codes online,
while enforcing consistency between codes obtained from views of same image
-
do not require explicit pairwise feature comparisons
-
propose a swapped prediction problem
- task = predict the “code of a view” from “representation of another view”
Multi-crop
- improvment to the image transformations
2. Related Work
(1) Instance and Contrastive Learning
map the image features to a set of trainable prototype vectors
(2) Clustering for Deep Representation Learning
- k-means assignments : used as pseudo-labels to learn visual representations
- scales to large uncurated dataset
- cast the pseudo-label assignment problem as an instance of optimal transformation problem
- this paper proposes…
- (1) map representations to prototype vectors
- (2) keep the soft assignment
(3) Handcrafted pretext tasks
-
ex) jigsaw puzzle
-
this paper propose multi-crop strategy
= sampling multi random crops with 2 different sizes ( standard & small )
3. Method
learn visual features in an online fashion ( w.o supervision )
\(\rightarrow\) propose an ONLINE clustering-based SELF-SUPERVISED method
Typical Clustering-based Methods = off-line
\(\rightarrow\) alternate between (1) cluster assignment & (2) training step
Enforce consistency between codes from different augmentations of the same image
( caution : do not consider the codes as a target, but only enforce consistent mapping )
Compute a code from an augmented version of image
& predict this code from augmented versions of the same image
Step 1) 2 image features input : \(\mathbf{z}_{t}\) and \(\mathbf{z}_{s}\)
- from different augmentation ( but same image )
Step 2) compute their codes : \(\mathbf{q}_{t}\) and \(\mathbf{q}_{s}\)
- by matching these features to a set of \(K\) prototypes \(\left\{\mathbf{c}_{1}, \ldots, \mathbf{c}_{K}\right\}\).
Step 3) “swapped” prediction problem
- \(L\left(\mathbf{z}_{t}, \mathbf{z}_{s}\right)=\ell\left(\mathbf{z}_{t}, \mathbf{q}_{s}\right)+\ell\left(\mathbf{z}_{s}, \mathbf{q}_{t}\right)\).
- \(\ell(\mathbf{z}, \mathbf{q})\) : fit between features \(\mathbf{z}\) and a code \(\mathbf{q}\)
(1) Online Clustering
(1) image : \(\mathbf{x}_{n}\)
(2) augmented image : \(\mathbf{x}_{n t}\)…. applying a transformation \(t\)
(3) mapped to a vector representation : \(\mathbf{z}_{n t}=f_{\theta}\left(\mathbf{x}_{n t}\right) / \mid \mid f_{\theta}\left(\mathbf{x}_{n t}\right) \mid \mid _{2}\)
(4) compute code : \(\mathbf{q}_{n t}\)
- by mapping \(\mathbf{z}_{n t}\) to a set of \(K\) trainable prototype vectors, \(\left\{\mathbf{c}_{1}, \ldots, \mathbf{c}_{K}\right\}\)
- \(\mathbf{C}\) : matrix whose columns are the \(\mathbf{c}_{1}, \ldots, \mathbf{c}_{k}\)
\(\rightarrow\) how to compute these \(\mathbf{q}_{n t}\) & update \(\left\{\mathbf{c}_{1}, \ldots, \mathbf{c}_{K}\right\}\) ??
Swapped Prediction problem
Loss Function
-
\(L\left(\mathbf{z}_{t}, \mathbf{z}_{s}\right)=\ell\left(\mathbf{z}_{t}, \mathbf{q}_{s}\right)+\ell\left(\mathbf{z}_{s}, \mathbf{q}_{t}\right)\).
- \(\ell\left(\mathbf{z}_{t}, \mathbf{q}_{s}\right)\) : predicting the code \(\mathbf{q}_{s}\) from the feature \(\mathbf{z}_{t}\)
- \(\ell\left(\mathbf{z}_{s}, \mathbf{q}_{t}\right)\) : predicting the code \(\mathbf{q}_{t}\) from the feature \(\mathbf{z}_{s}\)
( each term : CE loss )
- \(\ell\left(\mathbf{z}_{t}, \mathbf{q}_{s}\right)=-\sum_{k} \mathbf{q}_{s}^{(k)} \log \mathbf{p}_{t}^{(k)}, \quad \text { where } \quad \mathbf{p}_{t}^{(k)}=\frac{\exp \left(\frac{1}{\tau} \mathbf{z}_{t}^{\top} \mathbf{c}_{k}\right)}{\sum_{k^{\prime}} \exp \left(\frac{1}{\tau} \mathbf{z}_{t}^{\top} \mathbf{c}_{k^{\prime}}\right)}\).
Total Loss for “Swapped Prediction problem”
( over all the images and pairs of data augmentations )
- \(-\frac{1}{N} \sum_{n=1}^{N} \sum_{s, t \sim \mathcal{T}}\left[\frac{1}{\tau} \mathbf{z}_{n t}^{\top} \mathbf{C} \mathbf{q}_{n s}+\frac{1}{\tau} \mathbf{z}_{n s}^{\top} \mathbf{C} \mathbf{q}_{n t}-\log \sum_{k=1}^{K} \exp \left(\frac{\mathbf{z}_{n t}^{\top} \mathbf{c}_{k}}{\tau}\right)-\log \sum_{k=1}^{K} \exp \left(\frac{\mathbf{z}_{n s}^{\top} \mathbf{c}_{k}}{\tau}\right)\right]\).
\(\rightarrow\) optimize w.r.t \(\theta\) & \(\mathbf{C}\)
Computing Codes Online
\(\rightarrow\) compute the codes using only the image features within a batch , using prototypes \(\mathbf{C}\)
( common prototypes \(\mathbf{C}\) are used across different batch )
Induce that all the examples in a batch are equally partitioned by the prototypes
\(\rightarrow\) preventing the trivial solution where every image has the same code
Notation
«««< HEAD:_posts/2022-05-20-(CL_paper9)SwAV.md
- Feature vectors : \(\mathbf{Z}=\left[\mathbf{z}_{1}, \ldots, \mathbf{z}_{B}\right]\)
- Codes : \(\mathbf{Q}=\left[\mathbf{q}_{1}, \ldots, \mathbf{q}_{B}\right]\)
-
Prototype vectors : \(\mathbf{C}=\left[\mathbf{c}_{1}, \ldots, \mathbf{c}_{K}\right]\)
- feature vectors : \(\mathbf{Z}=\left[\mathbf{z}_{1}, \ldots, \mathbf{z}_{B}\right]\)
- prototypes : \(\mathbf{C}=\left[\mathbf{c}_{1}, \ldots, \mathbf{c}_{K}\right]\)
- codes : \(\mathbf{Q}=\left[\mathbf{q}_{1}, \ldots, \mathbf{q}_{B}\right]\)
9b5515f0 (swav):_posts/2022-05-20-(CL_paper8)SwAV.md
\(\rightarrow\) optimize \(\mathbf{Q}\) to maximize similarity between features & prototypes
( = \(\max _{\mathbf{Q} \in \mathcal{Q}} \operatorname{Tr}\left(\mathbf{Q}^{\top} \mathbf{C}^{\top} \mathbf{Z}\right)+\varepsilon H(\mathbf{Q})\) )
Loss Function for “Computing Codes Online”
\(\max _{\mathbf{Q} \in \mathcal{Q}} \operatorname{Tr}\left(\mathbf{Q}^{\top} \mathbf{C}^{\top} \mathbf{Z}\right)+\varepsilon H(\mathbf{Q})\).
- \(H\) : entropy function
- \(H(\mathbf{Q})=-\sum_{i j} \mathbf{Q}_{i j} \log \mathbf{Q}_{i j}\).
- \(\varepsilon\) : parameter that controls the smoothness of the mapping
- high \(\varepsilon\) : rivial solution where all samples collapse into an unique representation
- thus, keep it low
[ Enforcing Equal Partition ] ( Asano et al. [2] )
-
by constraining the matrix \(Q\) to belong to the transportation polytope
-
(this paper) restrict the transportation polytope to the minibatch :
- \(\mathcal{Q}=\left\{\mathbf{Q} \in \mathbb{R}_{+}^{K \times B} \mid \mathbf{Q} \mathbf{1}_{B}=\frac{1}{K} \mathbf{1}_{K}, \mathbf{Q}^{\top} \mathbf{1}_{K}=\frac{1}{B} \mathbf{1}_{B}\right\}\).
\(\rightarrow\) enforce that on average each prototype is selected at least \(\frac{B}{K}\) times in the batch.
-
solution : continuous solution \(\mathbf{Q}^{*}\) is obtained
\(\rightarrow\) round up to get discrete code
Details :
-
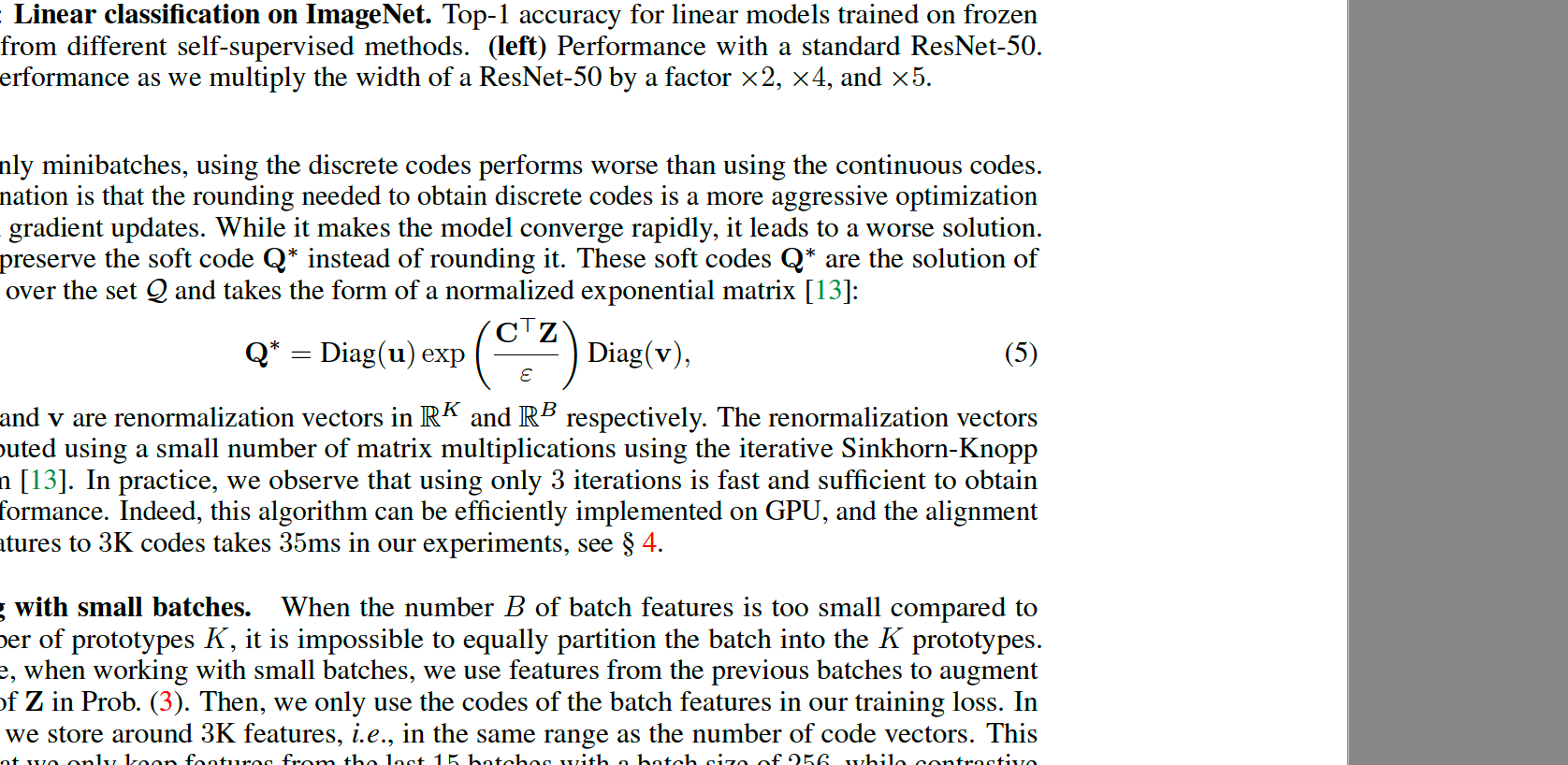
( in online setting ) discrete codes performs worse than using the continuous codes.
( \(\because\) rounding is a more aggressive optimization step than gradient updates )
\(\rightarrow\) makes the model converge rapidly, but leads to a worse solution.
-
thus, use the SOFT code \(\mathbf{Q}^{*}\)
- \(\mathbf{Q}^{*}=\operatorname{Diag}(\mathbf{u}) \exp \left(\frac{\mathbf{C}^{\top} \mathbf{Z}}{\varepsilon}\right) \operatorname{Diag}(\mathbf{v})\).
- where \(\mathbf{u}\) and \(\mathbf{v}\) are renormalization vectors in \(\mathbb{R}^{K}\) and \(\mathbb{R}^{B}\) respectively.
- \(\mathbf{Q}^{*}=\operatorname{Diag}(\mathbf{u}) \exp \left(\frac{\mathbf{C}^{\top} \mathbf{Z}}{\varepsilon}\right) \operatorname{Diag}(\mathbf{v})\).
Working with small batches
-
when \(B\) ( number of batch features ) < \(K\)
\(\rightarrow\) impossible to equally partition the batch into \(K\) prototype
-
solution : use features from the previous batches to augment the size of \(\mathbf{Z}\)
( but for loss…. only codes in the batch )
- store around \(3 \mathrm{~K}\) features
(2) Multi-crop
( = Augmenting views with smaller images )
Problem of random crops :
- increasing the number of crops or “views” quadratically increases the memory and compute requirements
Solution : use two standard resolution crops
-
sample \(V\) additional low resolution crops
\(\rightarrow\) ensures only a small increase in the compute cost
BEFORE vs AFTER
- [BEFORE] \(L\left(\mathbf{z}_{t}, \mathbf{z}_{s}\right)=\ell\left(\mathbf{z}_{t}, \mathbf{q}_{s}\right)+\ell\left(\mathbf{z}_{s}, \mathbf{q}_{t}\right)\).
- [AFTER] \(L\left(\mathbf{z}_{t_{1}}, \mathbf{z}_{t_{2}}, \ldots, \mathbf{z}_{t_{V+2}}\right)=\sum_{i \in\{1,2\}} \sum_{v=1}^{V+2} \mathbf{1}_{v \neq i} \ell\left(\mathbf{z}_{t_{v}}, \mathbf{q}_{t_{i}}\right) .\).
4. Main Results
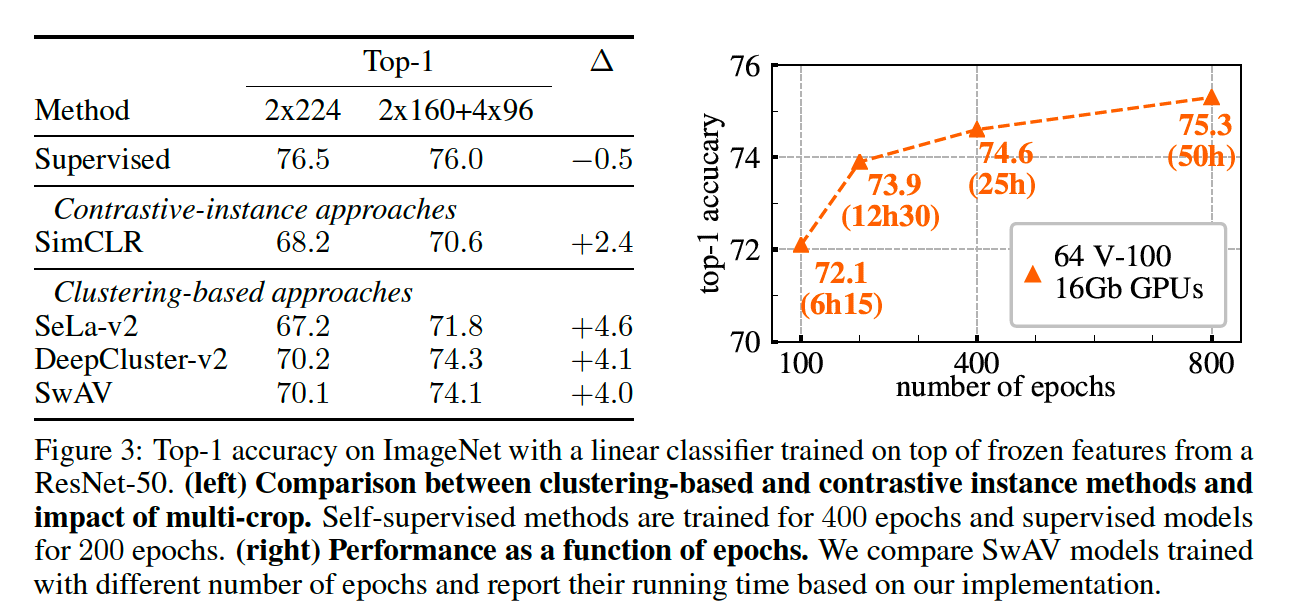
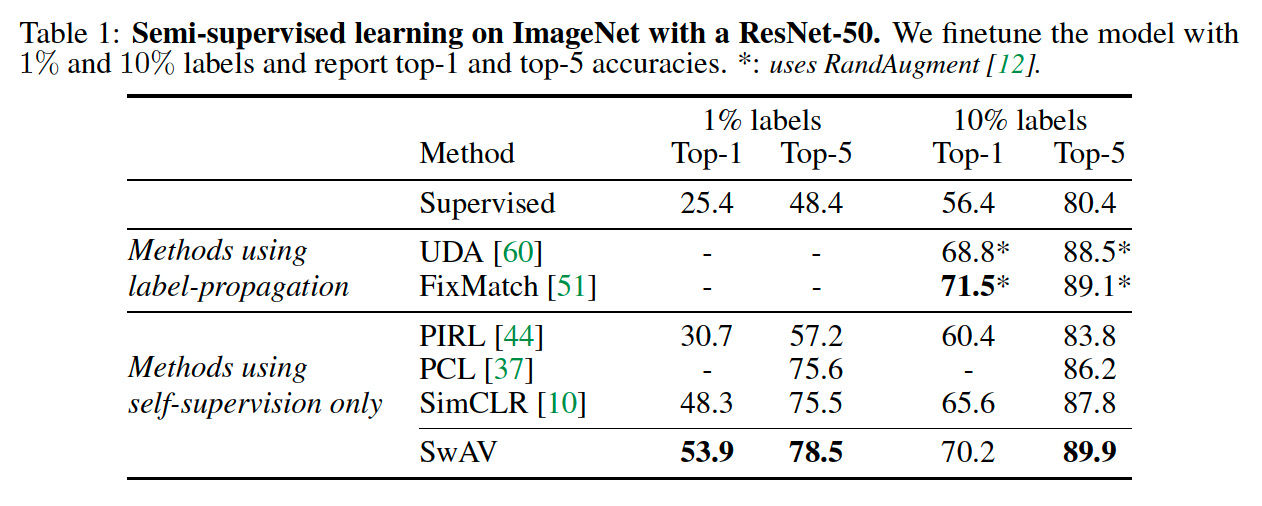
(1) Evaluating the unsupervised features on ImageNet
Settings : features of ResNet-50
2 experiments
- (1) linear classification on frozen features
- (2) semi-supervised learning by finetuning with few labels
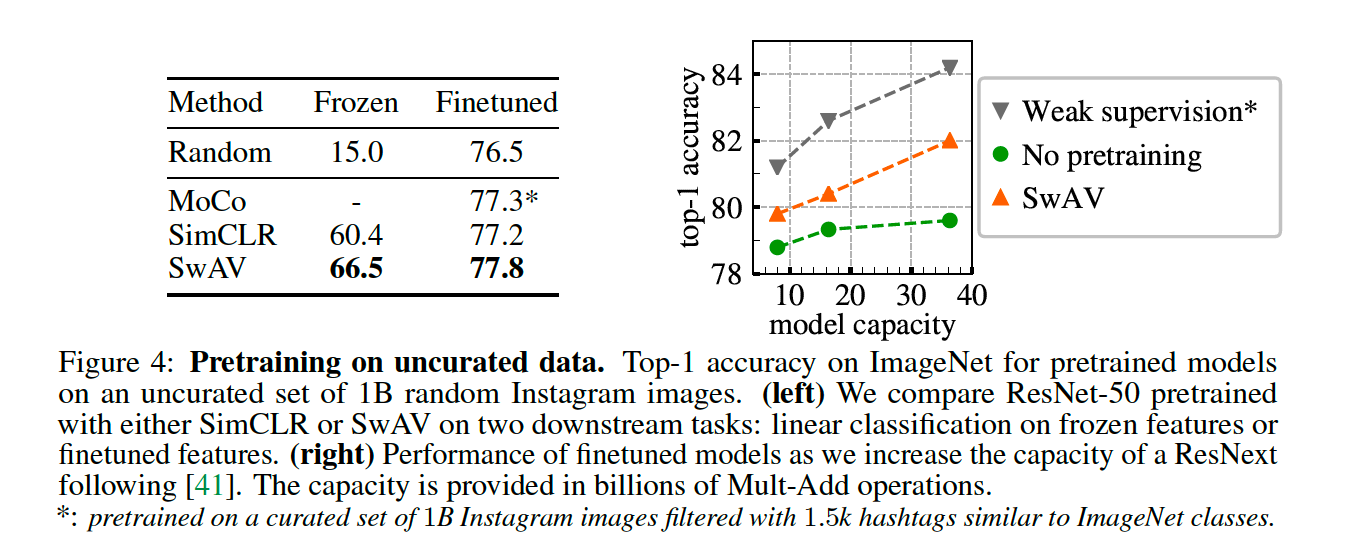
(2) Transferring unsupervised features to downstream tasks
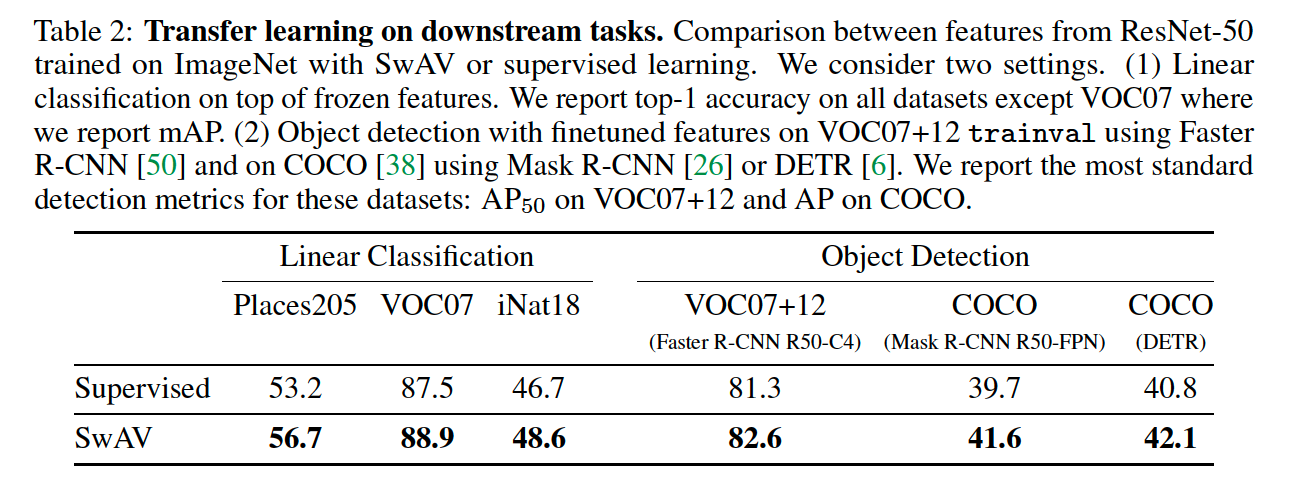
- outperforms supervised features on all three datasets
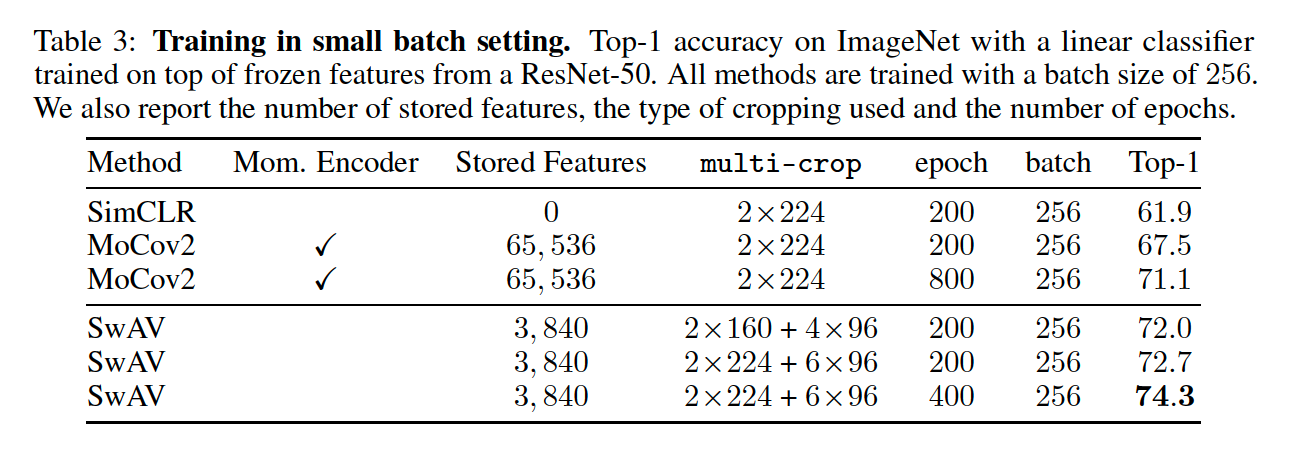
(3) Training with small batches
SwAV maintains SOTA performance even when trained in the small batch setting
5. Ablation Study