
Efficient Training of Visual Transformers with Small Datasets
Contents
- Abstract
- Introduction
- Advantage & Disadvantage of VTs
- Proposal
- Contribution
- Preliminaries
- Dense Relative Localization Task
- Experiments
- Datasets
- From Scratch
- Fine Tuning
0. Abstract
Visual Transformers (VTs) : compared to CNN…
-
1) can capture GLOBAL relations between image elements
-
2) potentially have a LARGER representation
-
BUT lack of the typical convolutional inductive bias
\(\rightarrow\) need more data
(1) Empirically analyze different VTs
- show that their performance on smaller datasets can be largely different
(2) Propose an auxiliary SSL task
-
extract additional information from images with only a negligible computational overhead
-
used jointly with the standard (supervised) training
(code) https://github.com/yhlleo/VTs-Drloc.
1. Introduction
Visual Transformers (VTs)
- alternative to standard CNN ( inspired by Transformer )
- pioneering work : ViT
- step 1) image is split using a grid of non-overlapping patches
- step 2) each patch is linearly projected in the input embedding space ( = token )
- step 3) all the tokens are processed by MHAs & FFNNs
(1) Advantage & Disadvantage of VTs
Advantage of VTs :
“use the attention layers to model GLOBAL relations between tokens”
( \(\leftrightarrow\) CNN : receptive field of the kernels locally limits the type of relations )
Disadvantage of VTs :
“increased representation capacity comes at a price”
- at the lack of the typical ”CNN inductive biases”
- 1) locality
- 2) translation invariance
- 3) hierarchical structure ofvisual information
\(\rightarrow\) need a lot of data!
To alleviate this problem …. variants of VTs
- common idea : HYBRID ( = mix convolutional layers with attention layers )
- to provide a local inductive bias to the VT.
- enjoy the advantages of both paradigms :
- ATTENTION ) model long-range dependencies
- CONVOLUTION ) emphasize the local properties
- BUT still not clear what is the behaviour of these networks when trained on medium-small datasets.
(2) Proposal
(1) compare VTs… by either
- a) training from scratch
- b) fine-tuning
on medium-small datasets
\(\rightarrow\) Empirically show that classification accuracy with smaller datasets largely varies.
(2) Propose auxiliary SSL pretext task
- & corresponding loss function to regularize training in a small training set
Proposed task
-
based on (unsupervised) learning the spatial relations between the output token embeddings
-
densely sample random pairs from the final embedding grid
& for each pair, guess the corresponding GEOMETRIC DISTANCE.
-
network needs to encode both **1) local ** and **2) contextual ** information in each embedding
(3) Contribution
- empirically compare different VTs
- propose a RELATIVE LOCALIZATION auxiliary task for VT training regularization
- show that this task is beneficial to speed-up training & improve generaization ability
2. Preliminaries
VT network
- [input] image split in a grid of K × K patches
- [process]
- each patch is projected in the input embedding space
- output : K × K input tokens
- [model] model ”pairwise relations” over the token intermediate representation
VT network with HYBRID architecture
( = second-generation VT )
usually reshape the sequence of these token embeddings in a spatial grid
-
to enable convolutional operations
( by using convolutions/pooling ….. initial K × K token grid can be reduced )
-
final embedding grid : k × k ( where k \(\leq\) K )
final k × k grid of embeddings
- representation of whole input image
- used for discriminative task
- ex) include “class token” over the whole grid
- ex) apply GAP
apply small MLP head!
- outputs a posterior distn over target classes
 .
.
3. Dense Relative Localization Task
Goal of our regularization task :
- encourage the VT to learn ”spatial” information without using additional manual annotations
By densely sampling multiple embedding pairs for each image
& guess their relative distances
Notation
- input image : \(x\)
- \(k \times k\) grid of final embeddings : \(G_x=\left\{\mathbf{e}_{i, j}\right\}_{1 \leq i, j \leq k}\)
- where \(\mathbf{e}_{i, j} \in \mathbb{R}^d\), and \(d\) is the dimension of the embedding space
Procedure
step 1)
For each \(G_x\) ……… randomly sample multiple ”pairs of embeddings”
step 2)
For each pair \(\left(\mathbf{e}_{i, j}, \mathbf{e}_{p, h}\right)\) …….. compute the 2D normalized target translation offset \(\left(t_u, t_v\right)^T\)
-
$$t_u=\frac{ i-p }{k}, \quad t_v=\frac{ j-h }{k}, \quad\left(t_u, t_v\right)^T \in[0,1]^2$$.
step 3)
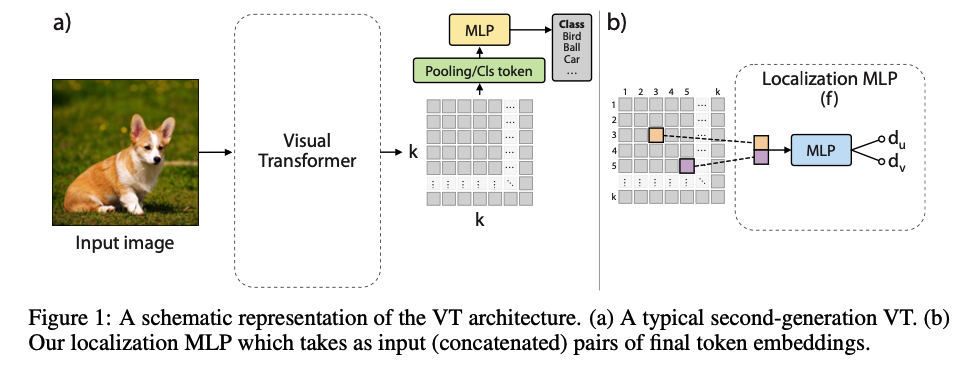
pair \(\left(\mathbf{e}_{i, j}, \mathbf{e}_{p, h}\right)\) are concatenated
& input to small MLP (Fig. 1 (b))
- predicts the relative distance between two positions on grid
Dense Relative Localization Loss :
| $$\mathcal{L}{d r l o c}=\sum{x \in B} \mathbb{E}{\left(\mathbf{e}{i, j}, \mathbf{e}_{p, h}\right) \sim G_x}\left[\left | \left(t_u, t_v\right)^T-\left(d_u, d_v\right)^T\right | _1\right]$$. |
- Let \(\left(d_u, d_v\right)^T=\) \(f\left(\mathbf{e}_{i, j}, \mathbf{e}_{p, h}\right)^T\).
- given a mini-batch \(B\) of \(n\) images
\(\mathcal{L}_{\text {drloc }}\) is added to the standard cross-entropy loss \(\left(\mathcal{L}_{c e}\right)\)
Final loss : \(\mathcal{L}_{t o t}=\mathcal{L}_{\text {ce }}+\lambda \mathcal{L}_{\text {drloc }}\)
- \(\lambda=0.1\) : in T2T and CvT
- \(\lambda=0.5\) : in Swin
4. Experiments
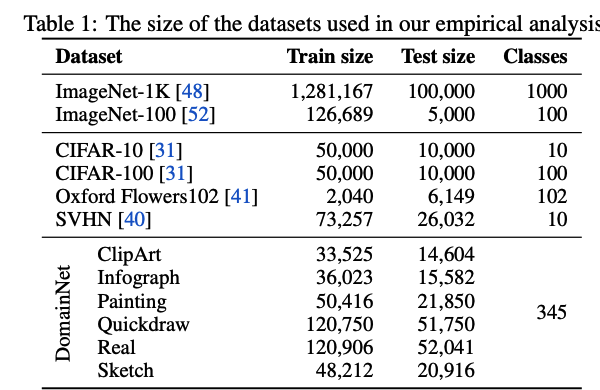
(1) Dataset
 .
.
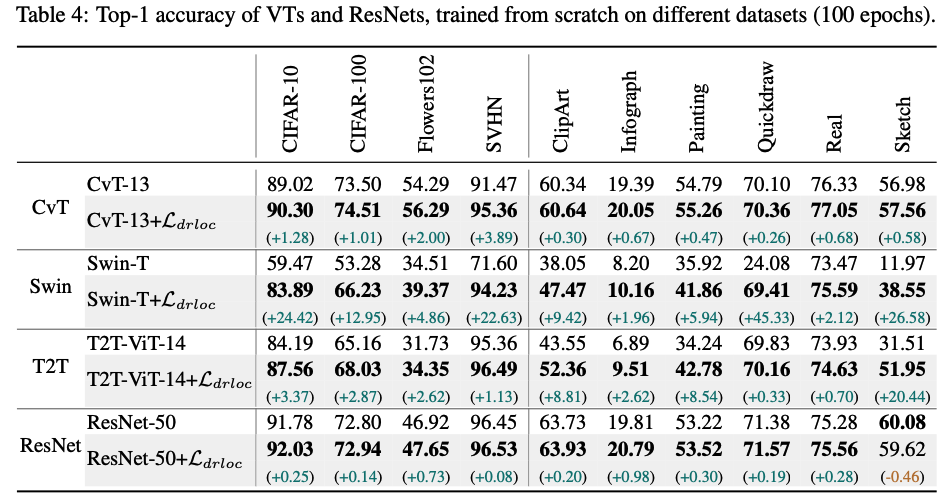
(2) From Scratch
 .
.
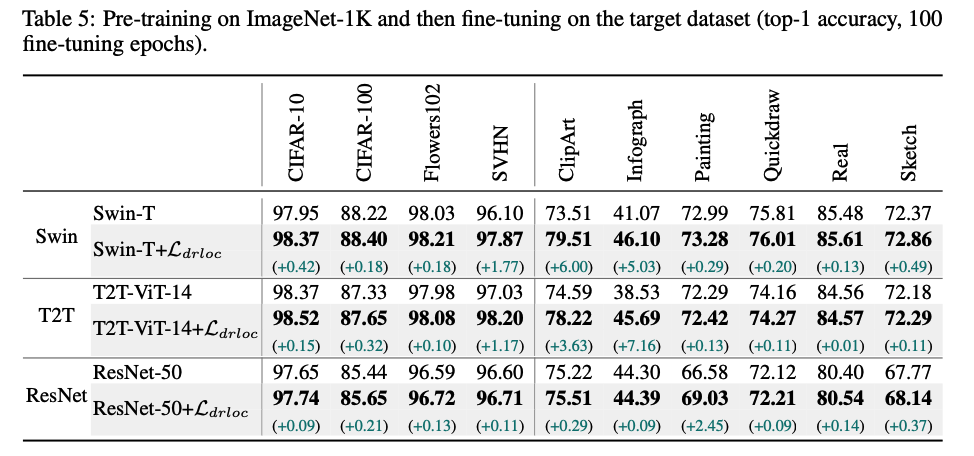
(3) Fine Tuning
 .
.