
( 참고 : 패스트 캠퍼스 , 한번에 끝내는 컴퓨터비전 초격차 패키지 )
05.Advanced Object Detection
1. One Stage Detection
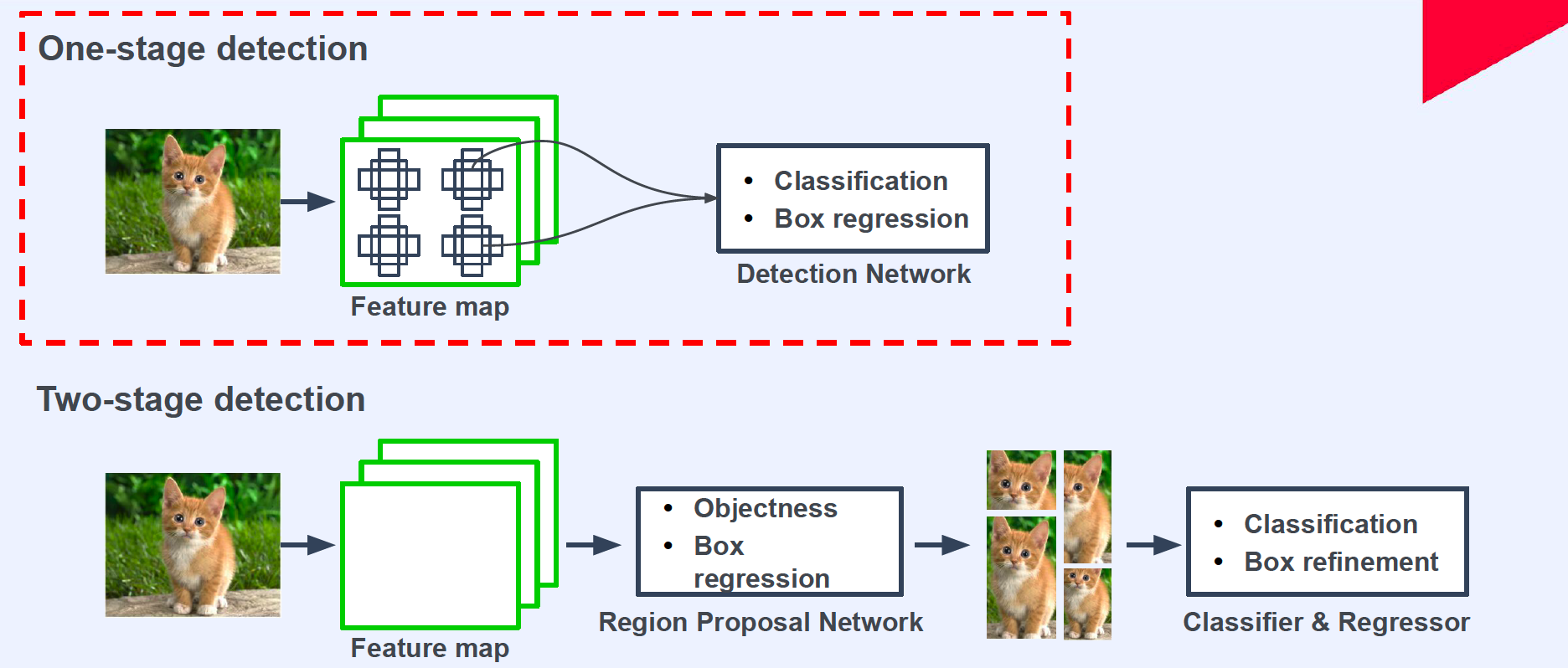
- ex) YOLO versions
- needed for real-time object detection
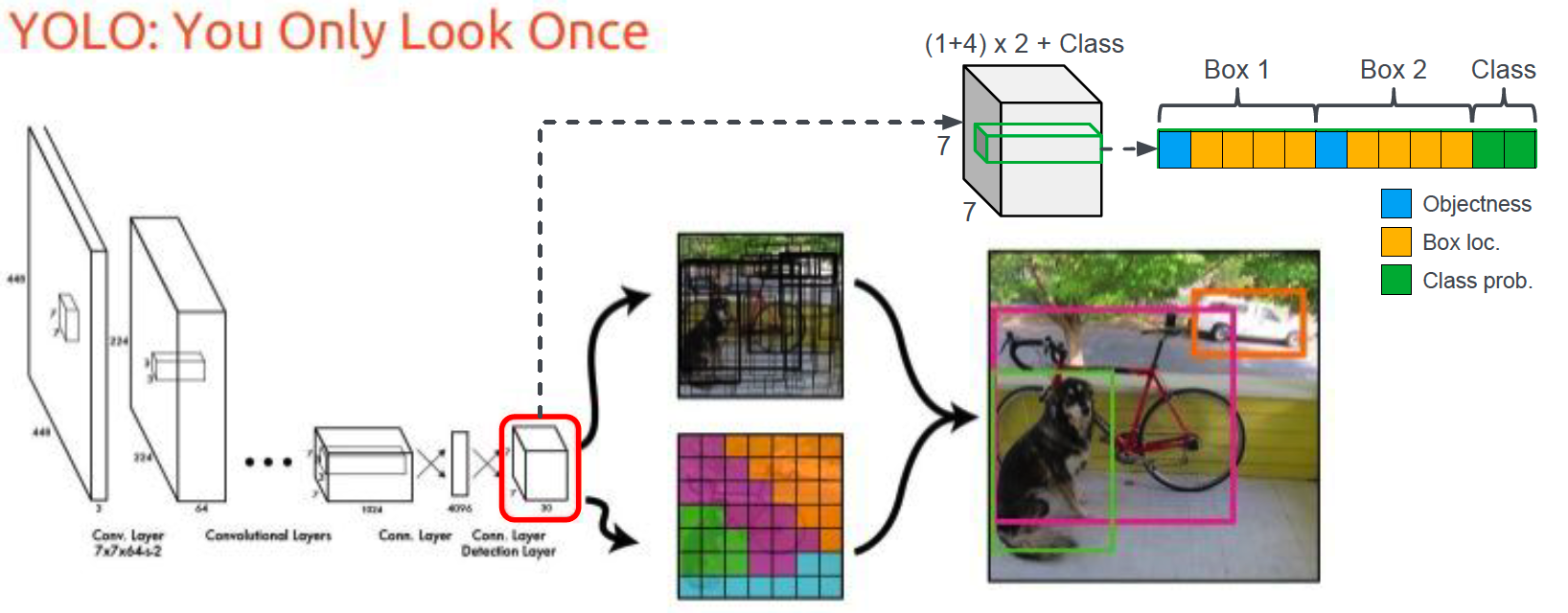
2. YOLO v1
3. Albumentations
import albumentations as A
from albumentations.pytorch import ToTensorV2
- why not pytorch transform??
\(\rightarrow\) albumentations can also convert boxes!
IMAGE_SIZE = 448
transformer = A.Compose([
A.Resize(height=IMAGE_SIZE, width=IMAGE_SIZE),
A.Normalize(mean=(0.485, 0.456, 0.406),std=(0.229, 0.224, 0.225)),
ToTensorV2(),
],
bbox_params=A.BboxParams(format='yolo', label_fields=['class_ids']),
)
data_dir = "../DATASET/Detection/"
BATCH_SIZE = 32
trainset = Detection_dataset(data_dir=data_dir, phase="train",
transformer=transformer)
trainloader = DataLoader(trainset, batch_size=BATCH_SIZE, shuffle=True,
collate_fn=collate_fn)
4. Build DataLoader
def build_dataloader(data_dir, batch_size=4):
transformer = A.Compose([
A.Resize(height=IMAGE_SIZE, width=IMAGE_SIZE),
A.Normalize(mean=(0.485, 0.456, 0.406),std=(0.229, 0.224, 0.225)),
ToTensorV2(),
],
bbox_params=A.BboxParams(format='yolo', label_fields=['class_ids']),
)
dataloaders = {}
train_dataset = Detection_dataset(data_dir=data_dir, phase="train", transformer=transformer)
dataloaders["train"] = DataLoader(train_dataset, batch_size=batch_size, shuffle=True, collate_fn=collate_fn)
val_dataset = Detection_dataset(data_dir=data_dir, phase="val", transformer=transformer)
dataloaders["val"] = DataLoader(val_dataset, batch_size=1, shuffle=False, collate_fn=collate_fn)
return dataloaders
5. YOLO v1 code
import torchvision
import torch.nn as nn
Build custom head
def build_head(num_bboxes, num_classes, grid_size):
head = nn.Sequential(
nn.Conv2d(in_channels=512, out_channels=1024, kernel_size=1, padding=0,bias=False),
nn.BatchNorm2d(1024),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=1024, out_channels=1024, kernel_size=3, padding=1,bias=False),
nn.BatchNorm2d(1024),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=1024, out_channels=1024, kernel_size=3, padding=1,bias=False),
nn.BatchNorm2d(1024),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=1024, out_channels=1024, kernel_size=3, padding=1,bias=False),
nn.BatchNorm2d(1024),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=1024, out_channels=(4+1)*num_bboxes+num_classes, kernel_size=1, padding=0, bias=False),
nn.AdaptiveAvgPool2d(output_size=(grid_size, grid_size))
)
class YOLOv1_RESNET(nn.Module):
def __init__(self, num_classes):
super().__init__()
num_classes = num_classes
num_bboxes = 2 # YoLo v1 = 2 boxes!
grid_size = 7 # 7x7 grid size
# backbone : ResNet18
resnet18 = torchvision.models.resnet18(pretrained=True)
layers = [m for m in resnet18.children()]
self.backbone = nn.Sequential(*layers[:-2]) # except for head
self.head = build_head(num_bboxes, num_classes, grid_size)
def forward(self, x):
out = self.backbone(x)
out = self.head(out)
return out
Prediction result : ( 32 x 12 x 7 x 7 )
- 12 = (5+5)+2
- 5 : first box
- 5 : second box
- 2 : class number
data_dir = "../DATASET/Detection/"
BATCH_SIZE = 32
trainset = Detection_dataset(data_dir=data_dir, phase="train",
transformer=transformer)
trainloader = DataLoader(trainset, batch_size=BATCH_SIZE, shuffle=False,
collate_fn=collate_fn)
model = YOLOv1_RESNET(num_classes=NUM_CLASSES)
for index, batch in enumerate(trainloader):
images = batch[0]
targets = batch[1]
filenames = batch[2]
predictions = model(images)
break
print(predictions.shape)
torch.Size([32, 12, 7, 7])
6. Loss Function of YOLO v1
print('batch size :',len(targets))
print('target shape :',targets[0].shape)
batch size : 2
target shape : (1, 5)
Shape of “target” & prediction
- target : [ n * [x_center, y_center, width, height, class_id] ]
- prediction : (1+4)*num_anchors + num_classes
- num_anchors = 2
- num_classes =2
\(\rightarrow\) need to convert target into the form of prediction ( = Build Target Grid )
Example :
- input : target
-
convert input into 7 x 7 x (1+4+2) matrix
-
ex)
- truck : [1, xc, yc, w, h, 1, 0]
- bus : [1, xc, yc, w, h, 0, 1]
( xc, yc, w, h = normalized value ( divided by image shape ) )
- output : 7 x 7 x (1+4+2) matrix
def build_target_grid(target, num_classes, grid_size):
# (1+4)*2 + num_classes (X)
# (1+4) + num_classes (O)
## "ground truth(target)" has only 1 box!
## ( predicted values have 2 boxes )
target_grid = torch.zeros((1+4+num_classes, grid_size, grid_size),
device=device)
for gt in target:
xc, yc, w, h, cls_id = gt
x_norm = (xc % (1/grid_size))
y_norm = (yc % (1/grid_size))
cls_id = int(cls_id)
i_grid = int(xc * grid_size)
j_grid = int(yc * grid_size)
#------------------------------------------------------------#
target_grid[0, j_grid, i_grid] = 1
target_grid[1:5, j_grid, i_grid] = torch.Tensor([x_norm,y_norm,w,h])
target_grid[5+cls_id, j_grid, i_grid] = 1
#------------------------------------------------------------#
return target_grid
def build_batch_target_grid(targets, num_classes, grid_size):
target_grid_batch = torch.stack([build_target_grid(target, num_classes, grid_size) for target in targets], dim=0)
return target_grid_batch
num_classes = 2
grid_size = 7
# before : 2 x (1,5)
# after : (2,7,7,7)
groundtruths = build_batch_target_grid(targets)
print(groundtruths.shape)
torch.Size([2, 7, 7, 7])
groundtruths[0]
# 1st 7x7 : objectness
# 2nd 7x7 : x_center
# 3rd 7x7 : y_center
# 4th 7x7 : W
# 5th 7x7 : H
# 6th 7x7 : truck
# 7th 7x7 : bus
tensor([[[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 1.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]],
[[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.1077, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]],
[[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.1027, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]],
[[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.5537, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]],
[[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.2500, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]],
[[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]],
[[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 1.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]]])
IoU (Intersection over Union)
to calculate IoU…
(step 1) need to convert the format of coordinate!
- (before) x_norm, y_norm, w, h
- (after) x_min, y_min, x_max, y_max ( unnormalized version )
(2) calculate intersection & union
def generate_xy_normed_grid(grid_size):
y_offset, x_offset = torch.meshgrid(torch.arange(grid_size),
torch.arange(grid_size))
xy_grid = torch.stack([x_offset, y_offset], dim=0)
xy_normed_grid = xy_grid / grid_size
return xy_normed_grid
# example
generate_xy_normed_grid(4)
tensor([[[0.0000, 0.2500, 0.5000, 0.7500],
[0.0000, 0.2500, 0.5000, 0.7500],
[0.0000, 0.2500, 0.5000, 0.7500],
[0.0000, 0.2500, 0.5000, 0.7500]],
[[0.0000, 0.0000, 0.0000, 0.0000],
[0.2500, 0.2500, 0.2500, 0.2500],
[0.5000, 0.5000, 0.5000, 0.5000],
[0.7500, 0.7500, 0.7500, 0.7500]]])
convert the format of coordinate!
- (before) x_norm, y_norm, w, h
- (after) x_min, y_min, x_max, y_max ( unnormalized version )
def xywh_to_xyxy(bboxes):
#------------------------------------------------#
# bboxes : (B, C, H, W) ... normalized
num_batch, _, grid_size, grid_size = bboxes.shape
#------------------------------------------------#
# generate grid : (B,H,W)
xy_normed_grid = generate_xy_normed_grid(grid_size=grid_size)
#------------------------------------------------#
# first channel (0) = x_n
# second channel (1) = y_n
xcyc = bboxes[:,0:2,...] + xy_normed_grid.tile(num_batch, 1,1,1)
wh = bboxes[:,2:4,...]
#------------------------------------------------#
x1y1 = xcyc - (wh/2)
x2y2 = xcyc + (wh/2)
return torch.cat([x1y1,x2y2], dim=1)
get IoU with 2 boxes
def get_IoU(cbox1, cbox2):
box1 = xywh_to_xyxy(cbox1)
box2 = xywh_to_xyxy(cbox2)
# be careful of max/min!
x1 = torch.max(box1[:, 0, ...], box2[:, 0, ...])
y1 = torch.max(box1[:, 1, ...], box2[:, 1, ...])
x2 = torch.min(box1[:, 2, ...], box2[:, 2, ...])
y2 = torch.min(box1[:, 3, ...], box2[:, 3, ...])
intersection = (x2-x1).clamp(min=0) * (y2-y1).clamp(min=0)
union = abs(cbox1[:, 2, ...]*cbox1[:, 3, ...]) + \
abs(cbox2[:, 2, ...]*cbox2[:, 3, ...]) - intersection
# .gt : True if >0, False o.w
intersection[intersection.gt(0)] = intersection[intersection.gt(0)] / union[intersection.gt(0)]
return intersection
Example )
# 2 pred box
pred_box1 = predictions[:, 1:5, ...]
pred_box2 = predictions[:, 6:10, ...]
# 1 ground truth
gt_box = groundtruths[:, 1:5, ...]
iou1 = get_IoU(pred_box1, gt_box)
iou2 = get_IoU(pred_box2, gt_box)
iou1 # IoU of 1 prediction result
tensor([[[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]],
[[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.3112, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]]],
grad_fn=<IndexPutBackward0>)
IoU of all the boxes ?
ious = torch.stack([iou1, iou2], dim=1)
print(ious.shape) # B x (2x7x7) ... 2 : number of pred boxes
torch.Size([2, 2, 7, 7])
among the two boxes of every data in batch…
\(\rightarrow\) get the max value ( = filtering = choosing the box with highest IoU )
max_iou, best_box = ious.max(dim=1, keepdim=True) # (B x (1x7x7))
max_iou = torch.cat([max_iou, max_iou], dim=1) # (B x (2x7x7))
best_box = torch.cat([best_box.eq(0), best_box.eq(1)], dim=1) # (B x (1x7x7))
Calculate Final Loss
(1) Predicted Values
# before : (B x 10(=(4+1)*2) x 7 x 7)
# after : (B x 2 x 5 x 7 x 7)
predictions_ = predictions[:, :5*2, ...].reshape(BATCH_SIZE, 2, 5, grid_size, grid_size)
obj_pred = predictions_[:, :, 0, ...]
xy_pred = predictions_[:, :, 1:3, ...]
wh_pred = predictions_[:, :, 3:5, ...]
cls_pred = predictions[:, 5*2:, ...]
(2) Ground Truth
# before : (B x 5(=4+1) x 7 x 7)
# after : (B x 1 x 5 x 7 x 7)
groundtruths_ = groundtruths[:, :5, ...].reshape(BATCH_SIZE, 1, 5, grid_size, grid_size)
obj_target = groundtruths_[:, :, 0, ...]
xy_target = groundtruths_[:, :, 1:3, ...]
wh_target= groundtruths_[:, :, 3:5, ...]
cls_target = groundtruths[:, 5:, ...]
(3) 3 kinds of losses
positive = obj_target * best_box
# (1) Objectiveness Loss
obj_loss = mse_loss(positive * obj_pred, positive * ious)
noobj_loss = mse_loss((1 - positive) * obj_pred, ious*0)
# (2) Box Regression Loss
xy_loss = mse_loss(positive.unsqueeze(dim=2) * xy_pred,
positive.unsqueeze(dim=2) * xy_target)
wh_loss = mse_loss(positive.unsqueeze(dim=2) * (wh_pred.sign() * (wh_pred.abs() + 1e-8).sqrt()),
positive.unsqueeze(dim=2) * (wh_target + 1e-8).sqrt())
# (3) Classification Loss
cls_loss = mse_loss(obj_target * cls_pred, cls_target)
Summary of YOLO v1 loss
class YOLOv1_LOSS():
def __init__(self, num_classes, device, lambda_coord=5., lambda_noobj=0.5):
self.num_classes = num_classes
self.device = device
self.grid_size = 7
self.lambda_coord = lambda_coord
self.lambda_noobj = lambda_noobj
self.mse_loss = nn.MSELoss(reduction="sum")
def __call__(self, predictions, targets):
self.batch_size, _, _, _ = predictions.shape
groundtruths = self.build_batch_target_grid(targets)
groundtruths = groundtruths.to(self.device)
with torch.no_grad():
iou1 = self.get_IoU(predictions[:, 1:5, ...], groundtruths[:, 1:5, ...])
iou2 = self.get_IoU(predictions[:, 6:10, ...], groundtruths[:, 1:5, ...])
ious = torch.stack([iou1, iou2], dim=1)
max_iou, best_box = ious.max(dim=1, keepdim=True)
max_iou = torch.cat([max_iou, max_iou], dim=1)
best_box = torch.cat([best_box.eq(0), best_box.eq(1)], dim=1)
predictions_ = predictions[:, :5*2, ...].reshape(self.batch_size, 2, 5, self.grid_size, self.grid_size)
obj_pred = predictions_[:, :, 0, ...]
xy_pred = predictions_[:, :, 1:3, ...]
wh_pred = predictions_[:, :, 3:5, ...]
cls_pred = predictions[:, 5*2:, ...]
groundtruths_ = groundtruths[:, :5, ...].reshape(self.batch_size, 1, 5, self.grid_size, self.grid_size)
obj_target = groundtruths_[:, :, 0, ...]
xy_target = groundtruths_[:, :, 1:3, ...]
wh_target= groundtruths_[:, :, 3:5, ...]
cls_target = groundtruths[:, 5:, ...]
positive = obj_target * best_box
obj_loss = self.mse_loss(positive * obj_pred, positive * ious)
noobj_loss = self.mse_loss((1 - positive) * obj_pred, ious*0)
xy_loss = self.mse_loss(positive.unsqueeze(dim=2) * xy_pred, positive.unsqueeze(dim=2) * xy_target)
wh_loss = self.mse_loss(positive.unsqueeze(dim=2) * (wh_pred.sign() * (wh_pred.abs() + 1e-8).sqrt()),
positive.unsqueeze(dim=2) * (wh_target + 1e-8).sqrt())
cls_loss = self.mse_loss(obj_target * cls_pred, cls_target)
obj_loss /= self.batch_size
noobj_loss /= self.batch_size
bbox_loss = (xy_loss+wh_loss) / self.batch_size
cls_loss /= self.batch_size
total_loss = obj_loss + self.lambda_noobj*noobj_loss + self.lambda_coord*bbox_loss + cls_loss
return total_loss, (obj_loss.item(), noobj_loss.item(), bbox_loss.item(), cls_loss.item())
def build_target_grid(self, target):
target_grid = torch.zeros((1+4+self.num_classes, self.grid_size, self.grid_size), device=self.device)
for gt in target:
xc, yc, w, h, cls_id = gt
xn = (xc % (1/self.grid_size))
yn = (yc % (1/self.grid_size))
cls_id = int(cls_id)
i_grid = int(xc * self.grid_size)
j_grid = int(yc * self.grid_size)
target_grid[0, j_grid, i_grid] = 1
target_grid[1:5, j_grid, i_grid] = torch.Tensor([xn,yn,w,h])
target_grid[5+cls_id, j_grid, i_grid] = 1
return target_grid
def build_batch_target_grid(self, targets):
target_grid_batch = torch.stack([self.build_target_grid(target) for target in targets], dim=0)
return target_grid_batch
def get_IoU(self, cbox1, cbox2):
box1 = self.xywh_to_xyxy(cbox1)
box2 = self.xywh_to_xyxy(cbox2)
x1 = torch.max(box1[:, 0, ...], box2[:, 0, ...])
y1 = torch.max(box1[:, 1, ...], box2[:, 1, ...])
x2 = torch.min(box1[:, 2, ...], box2[:, 2, ...])
y2 = torch.min(box1[:, 3, ...], box2[:, 3, ...])
intersection = (x2-x1).clamp(min=0) * (y2-y1).clamp(min=0)
union = abs(cbox1[:, 2, ...]*cbox1[:, 3, ...]) + \
abs(cbox2[:, 2, ...]*cbox2[:, 3, ...]) - intersection
intersection[intersection.gt(0)] = intersection[intersection.gt(0)] / union[intersection.gt(0)]
return intersection
def generate_xy_normed_grid(self):
y_offset, x_offset = torch.meshgrid(torch.arange(self.grid_size), torch.arange(self.grid_size))
xy_grid = torch.stack([x_offset, y_offset], dim=0)
xy_normed_grid = xy_grid / self.grid_size
return xy_normed_grid.to(self.device)
def xywh_to_xyxy(self, bboxes):
xy_normed_grid = self.generate_xy_normed_grid()
xcyc = bboxes[:,0:2,...] + xy_normed_grid.tile(self.batch_size, 1,1,1)
wh = bboxes[:,2:4,...]
x1y1 = xcyc - (wh/2)
x2y2 = xcyc + (wh/2)
return torch.cat([x1y1, x2y2], dim=1)
7. Train YOLO v1
BATCH_SIZE = 2
DEVICE = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
data_dir = "../DATASET/Detection/"
train_dset = Detection_dataset(data_dir=data_dir, phase="train",
transformer=transformer)
train_dloader = DataLoader(train_dset, batch_size=BATCH_SIZE, shuffle=True,
collate_fn=collate_fn)
model = YOLOv1_RESNET(num_classes=NUM_CLASSES)
criterion = YOLOv1_LOSS(num_classes=NUM_CLASSES, device=DEVICE)
optimizer = torch.optim.SGD(model.parameters(), lr=0.0001, weight_decay=5e-4)
( Simple Training Code )
for index, batch in enumerate(train_dloader):
images = batch[0].to(DEVICE)
targets = batch[1]
filenames = batch[2]
predictions = model(images)
loss, (obj_loss, noobj_loss, bbox_loss, cls_loss) = criterion(predictions, targets)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if index % 5 == 0:
print(loss.item(), obj_loss, noobj_loss, bbox_loss, cls_loss)
Training Code Function
def train_one_epoch(dataloaders, model, criterion, optimizer, device):
train_loss = defaultdict(float)
val_loss = defaultdict(float)
for phase in ["train", "val"]:
# different in (1) Dropout, (2) BatchNorm
if phase == "train":
model.train()
else:
model.eval()
running_loss = defaultdict(float)
for index, batch in enumerate(dataloaders[phase]):
images = batch[0].to(device)
targets = batch[1]
filenames = batch[2]
with torch.set_grad_enabled(phase == "train"):
predictions = model(images)
loss, (obj_loss, noobj_loss, bbox_loss, cls_loss) = criterion(predictions, targets)
if phase == "train":
optimizer.zero_grad()
loss.backward()
optimizer.step()
running_loss["total_loss"] += loss.item()
running_loss["obj_loss"] += obj_loss
running_loss["noobj_loss"] += noobj_loss
running_loss["bbox_loss"] += bbox_loss
running_loss["cls_loss"] += cls_loss
train_loss["total_loss"] += loss.item()
train_loss["obj_loss"] += obj_loss
train_loss["noobj_loss"] += noobj_loss
train_loss["bbox_loss"] += bbox_loss
train_loss["cls_loss"] += cls_loss
if (index > 0) and (index % VERBOSE_FREQ) == 0:
text = f"iteration:[{index}/{len(dataloaders[phase])}] - "
for k, v in running_loss.items():
text += f"{k}: {v/VERBOSE_FREQ:.4f} "
running_loss[k] = 0.
print(text)
else:
val_loss["total_loss"] += loss.item()
val_loss["obj_loss"] += obj_loss
val_loss["noobj_loss"] += noobj_loss
val_loss["bbox_loss"] += bbox_loss
val_loss["cls_loss"] += cls_loss
for k in train_loss.keys():
train_loss[k] /= len(dataloaders["train"])
val_loss[k] /= len(dataloaders["val"])
return train_loss, val_loss
8. Final Code
(1) Hyperparameters
NUM_CLASSES = 2
IMAGE_SIZE = 448
BATCH_SIZE = 12
VERBOSE_FREQ = 100
DEVICE = torch.device('cuda' if torch.cuda.is_available and is_cuda else 'cpu')
(2) Dataset / Model / Optimizer / Loss function
data_dir = "../DATASET/Detection/"
dataloaders = build_dataloader(data_dir=data_dir, batch_size=BATCH_SIZE)
model = YOLOv1_RESNET(num_classes=NUM_CLASSES)
model = model.to(DEVICE)
criterion = YOLOv1_LOSS(num_classes=NUM_CLASSES, device=DEVICE)
optimizer = torch.optim.SGD(model.parameters(), lr=0.0001, momentum=0.9)
(3) Train
num_epochs = 100
best_epoch = 0
best_score = float('inf')
train_losses = []
val_losses = []
for epoch in range(num_epochs):
train_loss, val_loss = train_one_epoch(dataloaders, model, criterion, optimizer, DEVICE)
train_losses.append(train_loss)
val_losses.append(val_loss)
print(f"epoch:{epoch+1}/{num_epochs} - Train Loss: {train_loss['total_loss']:.4f}, Val Loss: {val_loss['total_loss']:.4f}")
if (epoch+1) % 10 == 0:
save_model(model.state_dict(), f'model_{epoch+1}.pth')
9. Confidence threshold & Non-maximum suppression (NMS)
not at training, only at inference stage!
- filter 1) confidence threshold
- filter 2) NMS (Non-maximum suppression)
@torch.no_grad()
def model_predict(image, model, conf_thres=0.3, iou_threshold=0.1):
predictions = model(image)
prediction = predictions.detach().cpu().squeeze(dim=0)
grid_size = prediction.shape[-1]
y_grid, x_grid = torch.meshgrid(torch.arange(grid_size), torch.arange(grid_size))
stride_size = IMAGE_SIZE/grid_size
conf = prediction[[0,5], ...].reshape(1, -1)
xc = (prediction[[1,6], ...] * IMAGE_SIZE + x_grid*stride_size).reshape(1,-1)
yc = (prediction[[2,7], ...] * IMAGE_SIZE + y_grid*stride_size).reshape(1,-1)
w = (prediction[[3,8], ...] * IMAGE_SIZE).reshape(1,-1)
h = (prediction[[4,9], ...] * IMAGE_SIZE).reshape(1,-1)
cls = torch.max(prediction[10:, ...].reshape(NUM_CLASSES, -1), dim=0).indices.tile(1,2)
x_min = xc - w/2
y_min = yc - h/2
x_max = xc + w/2
y_max = yc + h/2
prediction_res = torch.cat([x_min, y_min, x_max, y_max, conf, cls], dim=0)
prediction_res = prediction_res.transpose(0,1)
prediction_res[:, 2].clip(min=0, max=image.shape[1])
prediction_res[:, 3].clip(min=0, max=image.shape[0])
# 1~4th : box coordinates
# 5th : confidence score
### (filter 1) score > confidence_threshold
pred_res = prediction_res[prediction_res[:, 4] > conf_thres]
### (filter 2) iou > iou_threshold
nms_index = torchvision.ops.nms(boxes=pred_res[:, 0:4], scores=pred_res[:, 4], iou_threshold=iou_threshold)
pred_res_ = pred_res[nms_index].numpy()
n_obj = pred_res_.shape[0]
bboxes = np.zeros(shape=(n_obj, 4), dtype=np.float32)
bboxes[:, 0:2] = (pred_res_[:, 0:2] + pred_res_[:, 2:4]) / 2
bboxes[:, 2:4] = pred_res_[:, 2:4] - pred_res_[:, 0:2]
scores = pred_res_[:, 4]
class_ids = pred_res_[:, 5]
return bboxes, scores, class_ids