
[Paper Review] 25. Image-to-Image translation with Conditional Adversarial Networks
Contents
- Abstract
- Introduction
- Related Work
- Structured Losses for image modeling
- Conditional GANs
- Pix2Pix
- Method
- Objective
- Network Architectures
- Optimization and Inference
0. Abstract
investigate CONDITIONAL adversarial networks
as a solution to image-to-image translation
Can be used to solve variety of tasks! ( below )
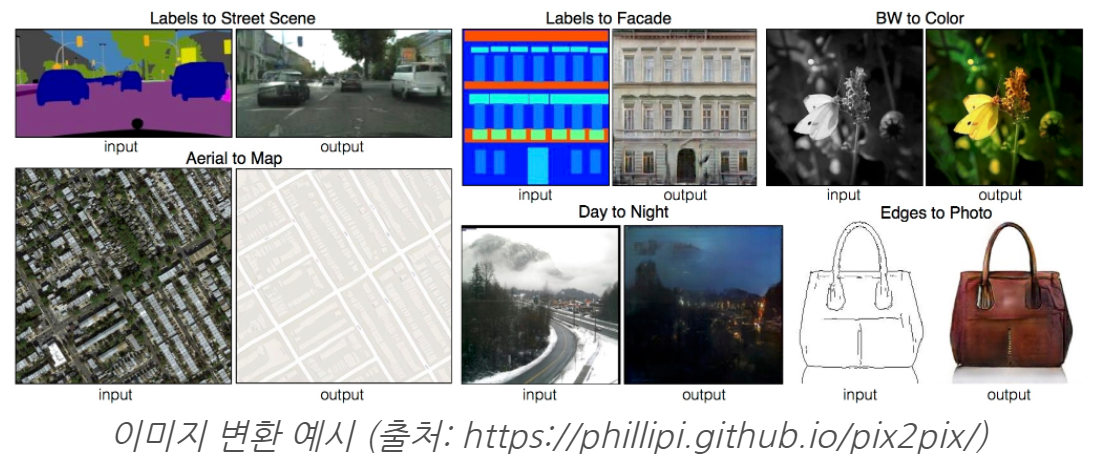
1. Introduction
explore GANs in conditional setting
\(\rightarrow\) “condition on INPUT IMAGE”
2. Related Work
1) Structured Losses for image modeling
image-to-image translation
- often formulated as per-pixel classification / regression
- learn a structured loss
- penalize the “joint configuration of the output”
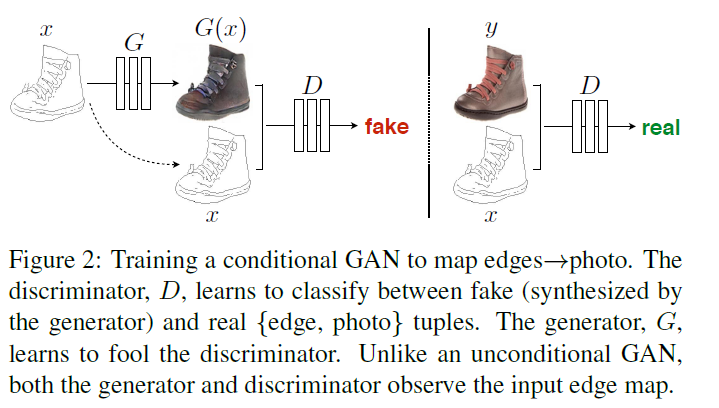
2) Conditional GANs
several other papers have also used GANs for image-to-image mapping…
but only applied the GAN “unCONDITIONALLY”
3) Pix2Pix
-
generator : “U-net”
-
discriminator : convolutional “PatchGAN” classifier
( only penalizes structure at the scale of image patches )
3. Method
GANs vs CGANs
- GANs = \(G : z \rightarrow y\)
- conditional GANs = \(G : {x,z} \rightarrow y\)
1) Objective
(a) objective of conditional GAN
- \(\mathcal{L}_{c G A N}(G, D)= \mathbb{E}_{x, y}[\log D(x, y)]+ \mathbb{E}_{x, z}[\log (1-D(x, G(x, z))]\).
(b) objective of original GAN
- \(\mathcal{L}_{G A N}(G, D)= \mathbb{E}_{y}[\log D(y)]+\mathbb{E}_{x, z}[\log (1-D(G(x, z))]\).
(c) L1 distance
- beneficial to mix GAN objective with more traditional loss
- L1 encourages less blurring than L2
- \(\mathcal{L}_{L 1}(G)=\mathbb{E}_{x, y, z}\left[ \mid \mid y-G(x, z) \mid \mid _{1}\right]\).
FINAL OBJECTIVE :
- \(G^{*}=\arg \min _{G} \max _{D} \mathcal{L}_{c G A N}(G, D)+\lambda \mathcal{L}_{L 1}(G)\).
without \(z\), can still learn mapping from \(x\) to \(y\)… BUT deterministic output!
\(\rightarrow\) provide noise only by dropout ( both at train + test )
BUT…minor stochasticity
2) Network Architectures
module :
- convolution - BatchNorm - ReLU
a) Generator with skips
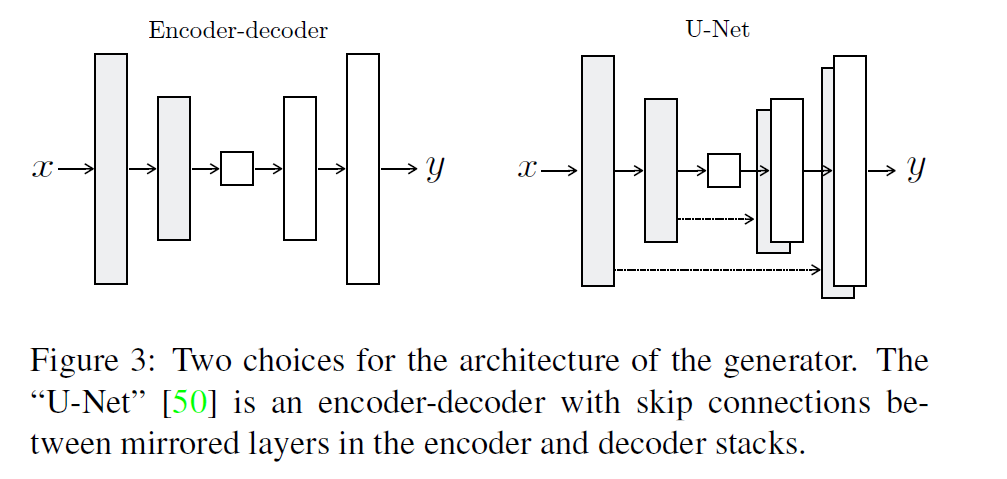
- add skip connections, following the general shape of a “U-Net”
b) Markovian discriminator (PatchGAN)
L1 & L2 loss : produce blurry results…
but in many cases, they capture low frequencies!
By using both…
- restrict \(D\) to only model high-frequency structure
- relying on an L1-term to force low-frequency correctness
3) Optimization and Inference
rather than training \(G\) to minimize \(\log (1-D(x, G(x, z))\)…
maximize \(\log D(x, G(x, z))\) !
At inference time…
- apply BN using stat of test batch, rathern than training batch