
Gated Graph Sequence NN (2015, 2251)
Contents
- Abstract
- Introduction
- GNN
- Propagation Model
- Output Model & Learning
- GGNN (Gated GNN)
- Node Annotations
- Propagation Model
- Output Models
- GGSNN (Gated Graph Sequence NN)
Abstract
GNN : feature learning technique for graph-structured inputs
this paper : GNN + GRU
1. Introduction
Main Contribution : extension of GNN that outputs SEQUENCES
2 settings for feature learning on graphs
- (1) learning represetnation of INPUT GRAPH
- (2) learning representaiton of INTERNAL SATE during the process of *producing a sequence of outputs8
propose GGS-NNS ( Gated Graph Sequence Neural Networks )
2. GNN
Notation
- graph : \(\mathcal{G}=(\mathcal{V}, \mathcal{E})\)
- node vector : \(\mathbf{h}_{v} \in \mathbb{R}^{D}\)
- node labels : \(l_{v} \in\left\{1, \ldots, L_{\mathcal{V}}\right\}\)
- edge labels : \(l_{e} \in\left\{1, \ldots, L_{\mathcal{E}}\right\}\)
Function
- \(\operatorname{In}(v)=\left\{v^{\prime} \mid\left(v^{\prime}, v\right) \in \mathcal{E}\right\}\) :
- returns the set of predecessor nodes \(v^{\prime}\) with \(v^{\prime} \rightarrow v\)
- \(\operatorname{OuT}(v)=\left\{v^{\prime} \mid\left(v, v^{\prime}\right) \in \mathcal{E}\right\}\) :
- returns the set of successor nodes \(v\) with \(v^{\prime} \rightarrow v\)
GNN maps “graphs” to “outputs”, via 2 steps
[1] Propagation step
- computes node representations for each node
[2] Output model
- output model = \(o_{v}=g\left(\mathbf{h}_{v}, l_{v}\right)\)
- maps from node representations and corresponding labels to an output \(o_{v}\)
(1) Propagation Model
- iterative procedure
- initial node representation \(\mathbf{h}_{v}^{(1)}\) : arbitrary values
- recurrence :
- \(\mathbf{h}_{v}^{(t)}=f^{*}\left(l_{v}, l_{\operatorname{CO}(v)}, l_{\operatorname{NBR}(v)}, \mathbf{h}_{\operatorname{NBR}(v)}^{(t-1)}\right)\).
(2) Output Model & Learning
- pass
3. GGNN (Gated GNN)
GNN + GRU
- unroll the recurrence for a fixed number of steps \(T\)
(1) Node Annotations
Unlike GNN…
-
incorporate nodel labels as additional inputs
( = call them “node annotation” ( \(\boldsymbol{x}\) ) )
How is node annotation used?
- ex) predict wheter node \(t\) can be reached from node \(s\)
(2) Propagation Model

Notation
( \(D\) : dimension of node vector )
( \(\mid \mathcal{V} \mid\) : number of nodes )
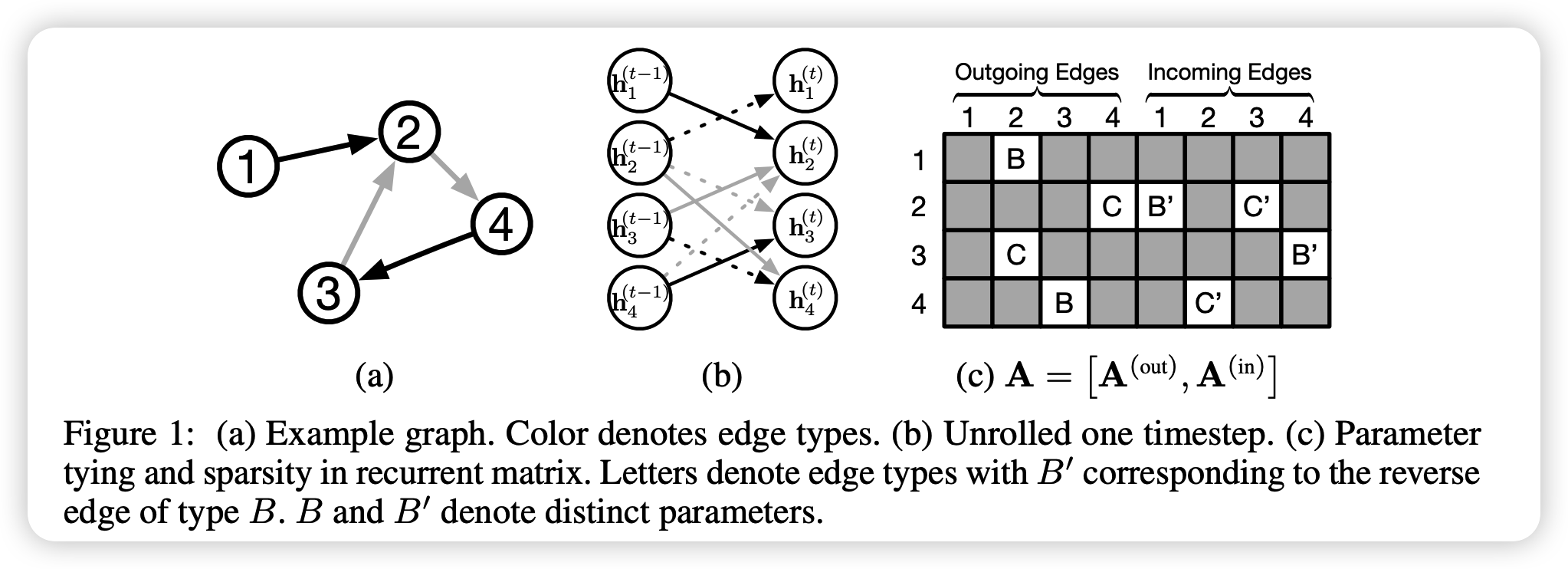
- \(\mathbf{A} \in \mathbb{R}^{D \mid \mathcal{V} \mid \times 2 D \mid \mathcal{V} \mid }\) :
- determines how nodes in the graph communicate with each other
- \(\mathbf{A}_{v:} \in \mathbb{R}^{D \mid V \mid \times 2 D}\) :
- two columns of blocks in \(\mathbf{A}^{(\text {out })}\) and \(\mathbf{A}^{(\mathrm{in})}\) corresponding to node \(v\)
- \(\mathbf{a}_{v}^{(t)} \in \mathbb{R}^{2 D}\) :
- contains activations from edges in both directions
(3) Output Models
( can be several types of one-step outputs )
-
node selection tasks
- \(o_{v}=g\left(\mathbf{h}_{v}^{(T)}, \boldsymbol{x}_{v}\right)\) for each node \(v\)
- apply softmax over node scores
-
graph level representation vector :
-
\(\mathbf{h}_{\mathcal{G}}=\tanh \left(\sum_{v \in \mathcal{V}} \sigma\left(i\left(\mathbf{h}_{v}^{(T)}, \boldsymbol{x}_{v}\right)\right) \odot \tanh \left(j\left(\mathbf{h}_{v}^{(T)}, \boldsymbol{x}_{v}\right)\right)\right)\).
-
\(\sigma\left(i\left(\mathbf{h}_{v}^{(T)}, \boldsymbol{x}_{v}\right)\right)\) : soft attention,
( that decides which nodes are relevant to the current graph-level task )
-
-
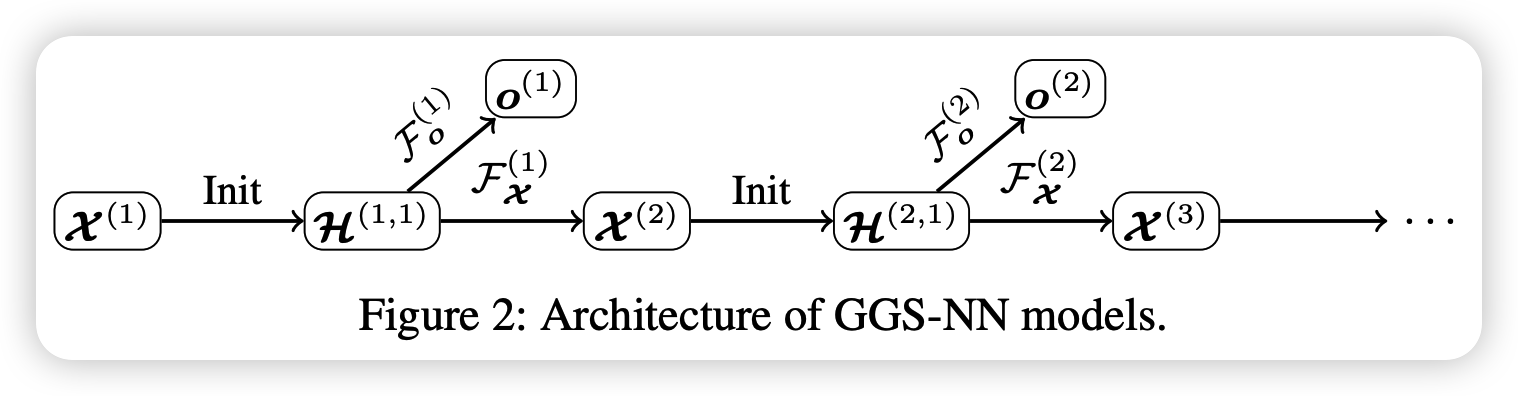
4. GGSNN (Gated Graph Sequence NN)
several GG-NNs operate in sequence, to produce an output sequence \(\boldsymbol{o}^{(1)} \ldots \boldsymbol{o}^{(K)}\)
( for \(k^{th}\) output step )
- matrix of node annotations : \(\mathcal{X}^{(k)}=\left[\boldsymbol{x}_{1}^{(k)} ; \ldots ; \boldsymbol{x}_{ \mid \mathcal{V} \mid }^{(k)}\right]^{\top} \in \mathbb{R}^{ \mid \mathcal{V} \mid \times L_{\mathcal{V}}}\)
use 2 GG-NNs : \(\mathcal{F}_{\boldsymbol{o}}^{(k)}\) & \(\mathcal{F}_{\mathcal{X}}^{(k)}\)
- \(\mathcal{F}_{\boldsymbol{o}}^{(k)}\) : for predicting \(\boldsymbol{o}^{(k)}\) from \(\mathcal{X}^{(k)}\)
- \(\mathcal{F}_{\mathcal{X}}^{(k)}\) : for predicting \(\mathcal{X}^{(k+1)}\) from \(\mathcal{X}^{(k)}\)
( both contain (1) propagation model & (2) output model )
Propagation model
-
\(\mathcal{H}^{(k, t)}=\) \(\left[\mathbf{h}_{1}^{(k, t)} ; \ldots ; \mathbf{h}_{ \mid \mathcal{V} \mid }^{(k, t)}\right]^{\top} \in \mathbb{R}^{ \mid \mathcal{V} \mid \times D}\)
- matrix of node vectors at the \(t^{t h}\) propagation step of the \(k^{t h}\) output step
-
\(\mathcal{F}_{\boldsymbol{o}}^{(k)}\) & \(\mathcal{F}_{\mathcal{X}}^{(k)}\) can have single propagation model, and a separate output models
( much faster to train & evaluate than full model )
Output model ( Node Annotation output model )
Goal : predict \(\mathcal{X}^{(k+1)}\) from \(\mathcal{H}^{(k, T)}\)
- prediction is done for each node independently,
- using neural network \(j\left(\mathbf{h}_{v}^{(k, T)}, \boldsymbol{x}_{v}^{(k)}\right)\)
Final output : \(\boldsymbol{x}_{v}^{(k+1)}=\sigma\left(j\left(\mathbf{h}_{v}^{(k, T)}, \boldsymbol{x}_{v}^{(k)}\right)\right) .\)
2 training settings
-
specifying all intermediate annotations \(\mathcal{X}^{(k)}\)
( = Sequence outputs with observed annotations )
-
training the full model end-to-end, given only \(\mathcal{X}^{(1)}\), graphs and target sequences
( = Sequence outputs with latent annotations
-
when intermediate node annotations \(\mathcal{X}^{(k)}\) are not available,
treat them as hidden units in the network )
-