Balanced Graph Structure Learning for MTS Forecasting (2022)
Contents
- Abstract
- Introduction
- Graph Structure Learning
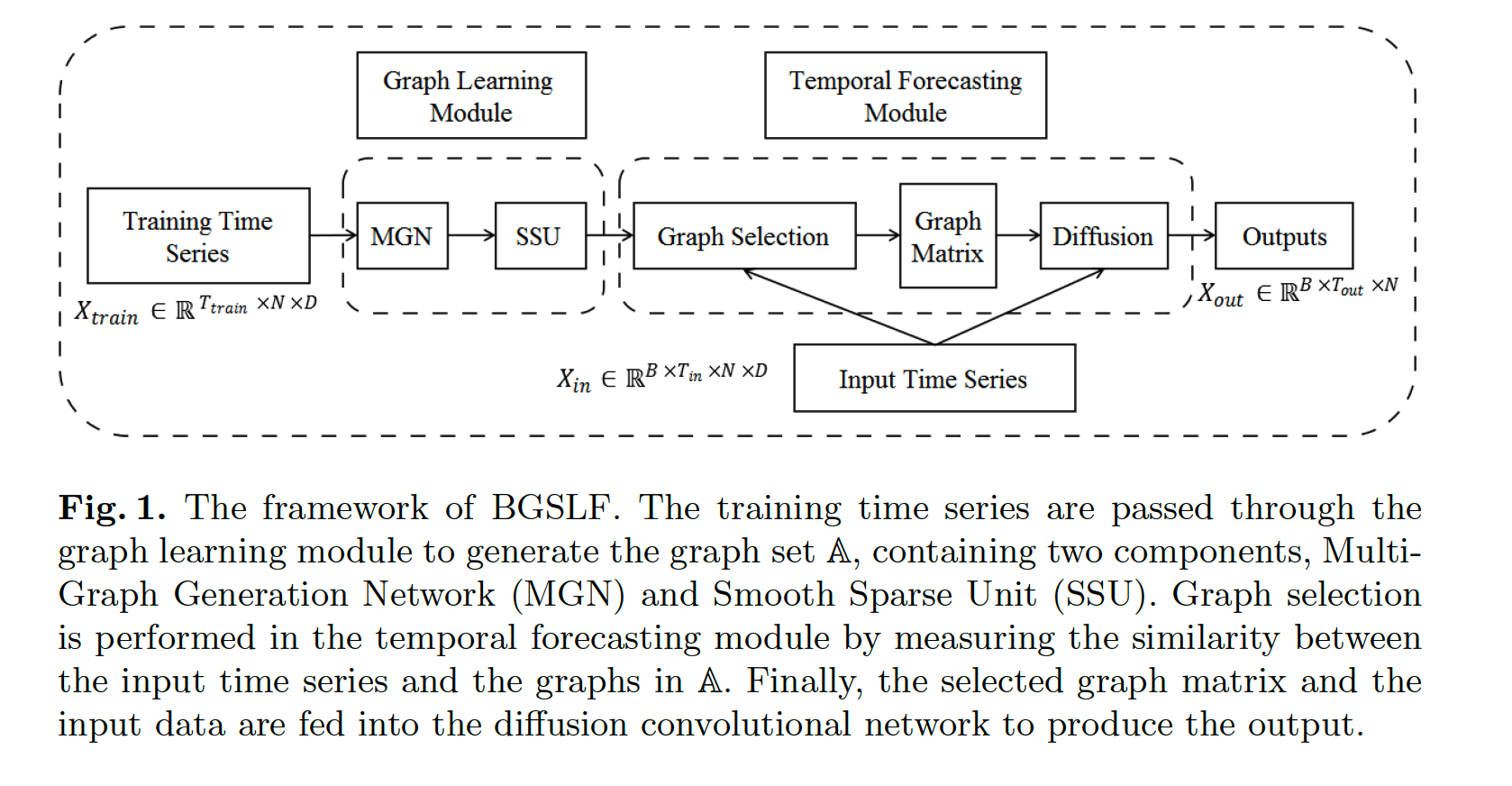
- Methodology
- Graph Structure Learning module
- MGN
- SSU
- Temporal Forecasting module
- Graph Selection
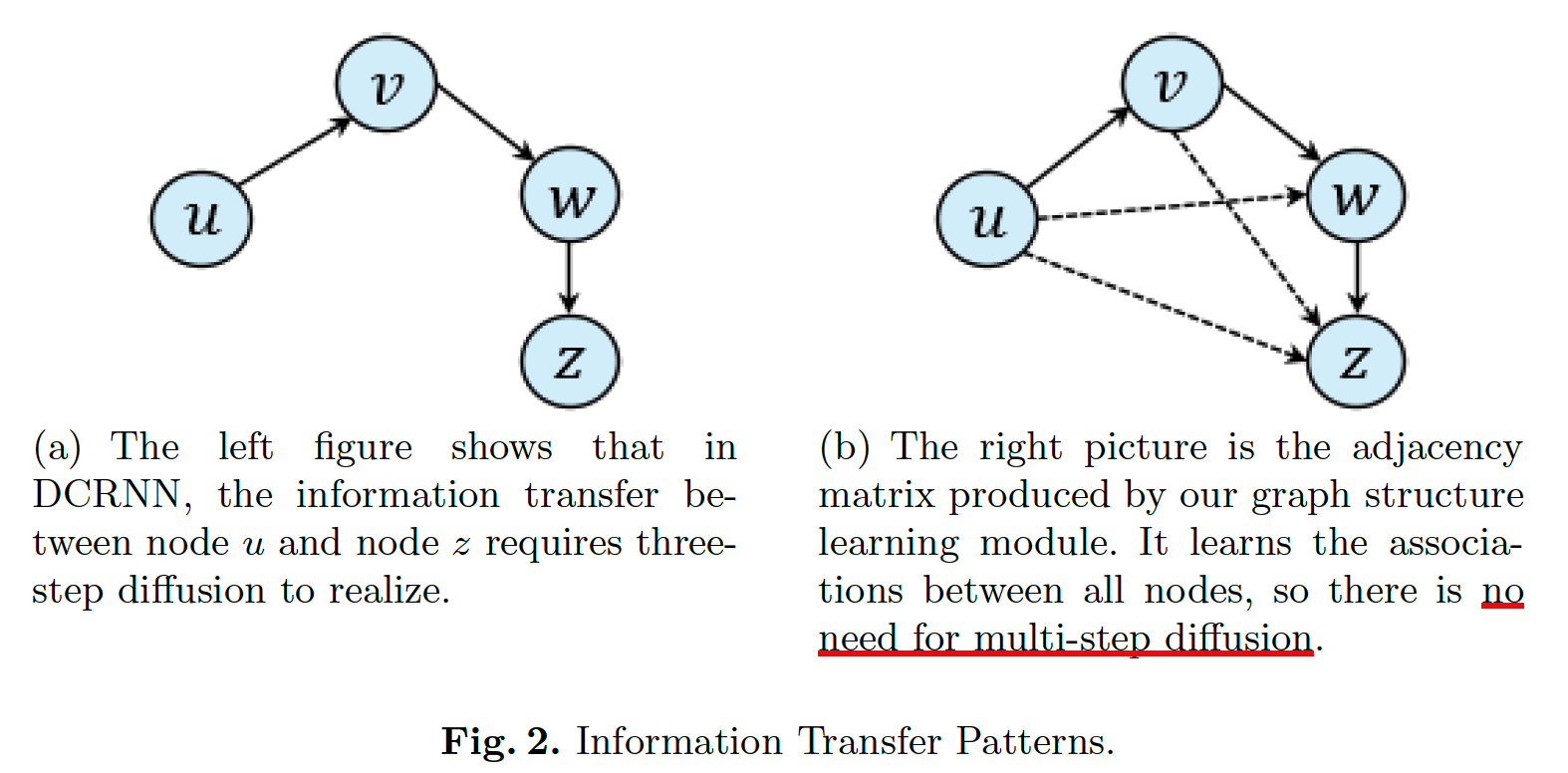
- DCRNN
- Graph Structure Learning module
0. Abstract
Propose
-
without the need of pre-defined graphs
-
balance the trade-off between efficiency & flexibility
BGSLF (Baalnced Graph Structure Learning for MTS Forecasting)
Modules
- (1) MGN (Multi-Graph Generation Network)
- (2) Graph Selection Module
- (1) & (2) \(\rightarrow\) to balance the trade-off
- (3) SSU (Smooth Sparse Unit)
- to design sparse graph structure
1. Introduction
Contributions
-
Propose BGSLF
- aim of learning smooth & sparse dependencies between variables
- can generate a specified number of graphs
- then, can select BEST graph per input
-
Graph Structure Learning module
-
incorporate domain knowledge
\(\rightarrow\) save lots of parameters
-
-
SSU (Smooth Sparse Unit)
- to infer continuous & sparse dependencies
- no need of non-differentiable functions
- ex) Top-K, Regularization
2. Graph Stucture Learning
Recent works
- consider spatial & temporal SEPERATELY
GWN (Graph Wave Net)
- use adaptive \(A\)
STAWnet
-
attention to get self-learned node embedding
( to capture spatial embedding )
GWN & STAWnet : use Dilated Causal Convolution
MTGNN
- learn 2 embedding vectors per node
- then obtain \(A\)
GDN
- node embedding per node
- then build k\(NN\) graph
AGCRN
- 2 adaptive modules for enhancing GCN
- infer dynamic spatial relations
3. Methodology
(1) Graph Structure Learning module
a) MGN (Multi-Graph Generation Network)
- extract dynamic spatial relationships
- use difference operation
\(\begin{aligned} \operatorname{Diff}\left(\mathbf{X}_{:, 1}, \mathbf{X}_{i:, 2}, \mathbf{X}_{i, 3}, \cdots, \mathbf{X}_{i, T}\right) &=\left\{\mathbf{X}_{:, 2}-\mathbf{X}_{:, 1}, \mathbf{X}_{:, 3}-\mathbf{X}_{i, 2}, \cdots, \mathbf{X}_{i, T}-\mathbf{X}_{i, T-1}\right\} \\ & \triangleq\left\{\hat{\mathbf{X}}_{:, 1}, \hat{\mathbf{X}}_{i, 2}, \ldots, \hat{\mathbf{X}}_{:, T-1}\right\} \end{aligned}\).
Considering periodicity of TS, set period \(P\) to segment MTS
\(\rightarrow\) \(S=\left\lfloor T_{\text {train }} / P\right\rfloor\)
- then, concatenate them!
- \(\mathcal{O}=\left[\hat{\mathbf{X}}_{\mathbf{1}}, \hat{\mathbf{X}}_{\mathbf{2}} \ldots \ldots \hat{\mathbf{X}}_{\mathbf{S}}\right] \in \mathbb{R}^{S} \times N \times D \times P\).
Then, use 2d-conv & FC layer to obtain \(R\) graphs
\(\rightarrow\) These constitute the graph set \(\mathbb{A}\).
b) SSU (Smooth Sparse Unit)
- to learn continuous & sparse graphs
2 function : \(f\) & \(\varphi\)
- [smooth function 1] \(f: \mathbb{R} \rightarrow \mathbb{R}\)
- \(f(x)= \begin{cases}e^{-\frac{1}{x}} & (x>0) \\ 0 & (x \leq 0)\end{cases}\).
- [smooth function 2] \(\varphi: \mathbb{R} \rightarrow[0,1]\)
- \(\varphi(x)=\frac{\alpha f(x)}{\alpha f(x)+f(1-x)}\left(\alpha \in \mathbb{R}_{+}\right)\).
- \(\varphi(x) \equiv\) 0 for \(x \leq 0\)
- \(\varphi(x) \in(0,1)\) for \(0<x<1\)
- \(\varphi(x) \equiv 1\) for \(x \geq 1\).
- \(\varphi(x)=\frac{\alpha f(x)}{\alpha f(x)+f(1-x)}\left(\alpha \in \mathbb{R}_{+}\right)\).
Output adjacency matrix : \(A=\frac{\alpha f(G)}{\alpha f(G)+f(\mathbf{1}-G)}\)
- \(G \in \mathbb{R}^{N \times N}\) : output of FC layer in (a)
(2) Temporal Forecasting module
a) Graph Selection
- from \(R\) graphs, select the best one ( finding optimal graph structure )
- for each TS \(X_{\text {in }} \in \mathbb{R}^{B \times T_{\mathrm{in}} \times N \times D}\),
- select the best graph!
Optimal graph : \(A=\underset{A_{i} \in \mathbb{A}}{\arg \max } \cos \left\langle\mathcal{X}^{T} \mathcal{X}, A_{i}\right\rangle\)
- \(\cos \langle\mathcal{X}, \mathcal{Y}\rangle=\frac{\sum_{i, j} x_{i j} y_{i j}}{\sqrt{\sum_{i, j} x_{i j}^{2} \cdot \sum_{i, j} y_{i j}^{2}}}\),
- \(\mathcal{X}=\sum_{i=1}^{B} \sum_{j=1}^{D} X_{\text {in }[i,:,:, j]} \in \mathbb{R}^{T_{\mathrm{in}} \times N}\),