
Structued Sequence Modeling with GCRN (2016)
Contents
- Abstract
- Preliminaries
- Structured sequence modeling
- LSTM
- CNN on graphs
- Proposed GCRN Models
- Model 1
- Model 2
0. Abstract
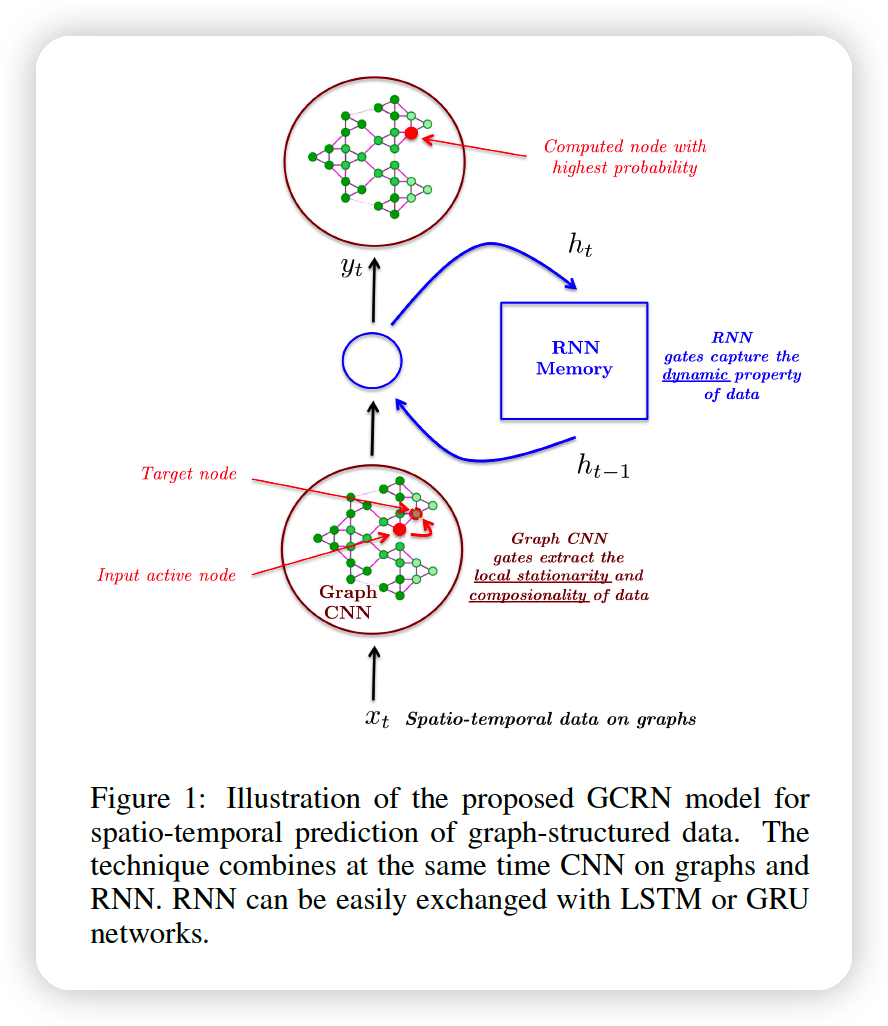
Introcues GCRN ( Graph Convolutional Recurrent Network )
- to predict structed sequences of data
- generalization of RNN to graph
- CNN + RNN
- combines CNN on graphs for spatial structures
- combines RNN on graph to find dynamic patterns
1. Preliminaries
(1) Structured sequence modeling
Sequence Modeling
= predicting the most likely future length \(k\) sequence, given past \(J\) observation
\(\rightarrow\) \(\hat{x}_{t+1}, \ldots, \hat{x}_{t+K}=\underset{x_{t+1}, \ldots, x_{t+K}}{\arg \max } P\left(x_{t+1}, \ldots, x_{t+K} \mid x_{t-J+1}, \ldots, x_{t}\right)\)
Example) n-gram LM ( with \(n= J+1\) )
- \(P\left(x_{t+1} \mid x_{t-J+1}, \ldots, x_{t}\right)\).
This paper
- special structued sequences, where \(x_t\) are NOT INDEPENDENT ( linked by pairwise relationship )
- \(x_{t}\) = graph signal
Notation :
-
\(\mathcal{G}=(\mathcal{V}, \mathcal{E}, A)\), where \(\mid \mathcal{V} \mid =n\)
- \(A \in \mathbb{R}^{n \times n}\) : weighted adjacency matrix
- \(x_{t} \in \mathbb{R}^{n \times d_{x}}\).
(2) LSTM
- pass
(3) CNN on graphs
Spectral formulation for the convolution operator
\(y=g_{\theta} *_{\mathcal{G}} x=g_{\theta}(L) x=g_{\theta}\left(U \Lambda U^{T}\right) x=U g_{\theta}(\Lambda) U^{T} x \in \mathbb{R}^{n \times d_{x}}\).
( meaning : signal \(x\) is filtered by \(g_{\theta}\) with an element-wise multiplication of its graph Fourier transform \(U^{T} x\) with \(g_{\theta}\) )
- graph signal : \(x \in \mathbb{R}^{n \times d_{x}}\)
- filter ( non-parametric kernel ) : \(g_{\theta}(\Lambda)=\operatorname{diag}(\theta)\)
- where \(\theta \in \mathbb{R}^{n}\) is a vector of Fourier coefficients
- \(U \in \mathbb{R}^{n \times n}\) : matrix of eigen vectors
- \(\Lambda \in \mathbb{R}^{n \times n}\) : diagonal matrix of eigenvalues of the \(L\)
- \(L=I_{n}-D^{-1 / 2} A D^{-1 / 2}=U \Lambda U^{T} \in \mathbb{R}^{n \times n}\).
\(\rightarrow\) evaluating above : \(O(n^2)\)
Truncation up to \(K-1\) ( ChebNet )
Idea : parameterize \(g_{\theta}\) as a TRUNCATED expansion
- up to order \(K-1\) of Chebyshev polynomials \(T_{k}\)
- \(g_{\theta}(\Lambda)=\sum_{k=0}^{K-1} \theta_{k} T_{k}(\tilde{\Lambda})\).
- (1) \(\theta \in \mathbb{R}^{K}\) is a vector of Chebyshev coefficients
- (2) \(T_{k}(\tilde{\Lambda}) \in \mathbb{R}^{n \times n}\) is the Chebyshev polynomial of order \(k\), where \(\tilde{\Lambda}=2 \Lambda / \lambda_{\max }-I_{n}\)
Graph Filtering Operation :
\(y=g_{\theta} *_{\mathcal{G}} x=g_{\theta}(L) x=\sum_{k=0}^{K-1} \theta_{k} T_{k}(\tilde{L}) x\).
-
where \(T_{k}(\tilde{L}) \in \mathbb{R}^{n \times n}\) is the Chebyshev polynomial of order \(k\) ,
evaluated at scaled Laplacian \(\tilde{L}=2 L / \lambda_{\max }-I_{n}\)
\(\rightarrow\) complexity reduction : \(\mathcal{O}(K \mid \mathcal{E} \mid )\) … linearly with the number of edges
\(\rightarrow\) meaining : \(K\)-neighborhood
2. Proposed GCRN Models
propose 2 GCRN architectures.
(1) Model 1
Idea = stack a graph CNN & LSTM
\(\begin{aligned} x_{t}^{\mathrm{CNN}} &=\mathrm{CNN}_{\mathcal{G}}\left(x_{t}\right) \\ i &=\sigma\left(W_{x i} x_{t}^{\mathrm{CNN}}+W_{h i} h_{t-1}+w_{c i} \odot c_{t-1}+b_{i}\right), \\ f &=\sigma\left(W_{x f} x_{t}^{\mathrm{CNN}}+W_{h f} h_{t-1}+w_{c f} \odot c_{t-1}+b_{f}\right), \\ c_{t} &=f_{t} \odot c_{t-1}+i_{t} \odot \tanh \left(W_{x c} x_{t}^{\mathrm{CNN}}+W_{h c} h_{t-1}+b_{c}\right), \\ o &=\sigma\left(W_{x o} x_{t}^{\mathrm{CNN}}+W_{h o} h_{t-1}+w_{c o} \odot c_{t}+b_{o}\right), \\ h_{t} &=o \odot \tanh \left(c_{t}\right) . \end{aligned}\).
(2) Model 2
Idea = replace CNN to GCN in Model 1
\(\begin{aligned} i &=\sigma\left(W_{x i} *_{\mathcal{G}} x_{t}+W_{h i} *_{\mathcal{G}} h_{t-1}+w_{c i} \odot c_{t-1}+b_{i}\right), \\ f &=\sigma\left(W_{x f} *_{\mathcal{G}} x_{t}+W_{h f} *_{\mathcal{G}} h_{t-1}+w_{c f} \odot c_{t-1}+b_{f}\right), \\ c_{t} &=f_{t} \odot c_{t-1}+i_{t} \odot \tanh \left(W_{x c} *_{\mathcal{G}} x_{t}+W_{h c} *_{\mathcal{G}} h_{t-1}+b_{c}\right), \\ o &=\sigma\left(W_{x o} *_{\mathcal{G}} x_{t}+W_{h o} *_{\mathcal{G}} h_{t-1}+w_{c o} \odot c_{t}+b_{o}\right), \\ h_{t} &=o \odot \tanh \left(c_{t}\right) . \end{aligned}\).