
Predicting Path Failure in Time-Evolving Graphs (2019)
Contents
- Abstract
- Problem Definition
- Methodology
- Framework
- Time-Evolving Graph Modeling
0. Abstract
Time-evolving graph
- sequence of graph snapshots (\(G_1, \cdots G_t\) )
- used to solve path classification
to capture temporal dependency & graph structure dynamics
\(\rightarrow\) design a novel DNN named LRGCN ( = LSTM R-GCN )
LRGCN
-
considers temporal dependency between time-adjacenct graph snapshots,
as a spetial relation with memory
-
use R-GCN to jointly process (1) intra & (2) inter time relations
-
Propose “new path representation method”, named SAPE
( SAPE = Self-Attentive Path Embedding )
\(\rightarrow\) embed paths of arbitrary length, into fixed-length vectors
1. Problem Definition
Notation of Time Evolving Graph
- nodes : \(V=\left\{v_{1}, v_{2}, \ldots, v_{N}\right\}\)
- \(\boldsymbol{A}=\left\{A^{0}, A^{1}, \ldots, A^{t}\right\}\);
- \(A^t\) : \(N\times N\) adjacency matrix at time \(t\)
- \(\boldsymbol{X}=\left\{X^{0}, X^{1}, \ldots, X^{t}\right\}\).
- \(X^{t}=\left\{x_{1}^{t}, x_{2}^{t}, \ldots, x_{N}^{t}\right\}\) : observation of each node, at time \(t\)
- \(x_{i}^{t} \in \mathbb{R}^{d}\) ( ex. temperature, power, signals … )
- \(X^{t}=\left\{x_{1}^{t}, x_{2}^{t}, \ldots, x_{N}^{t}\right\}\) : observation of each node, at time \(t\)
- Path : sequence \(p=\left\langle v_{1}, v_{2}, \ldots, v_{m}\right\rangle\) of length \(m\)
- observations of the path nodes at time \(t\) : \(s^{t}=\left\langle x_{1}^{t}, x_{2}^{t}, \ldots, x_{m}^{t}\right\rangle\)
( focus on Directed graph )
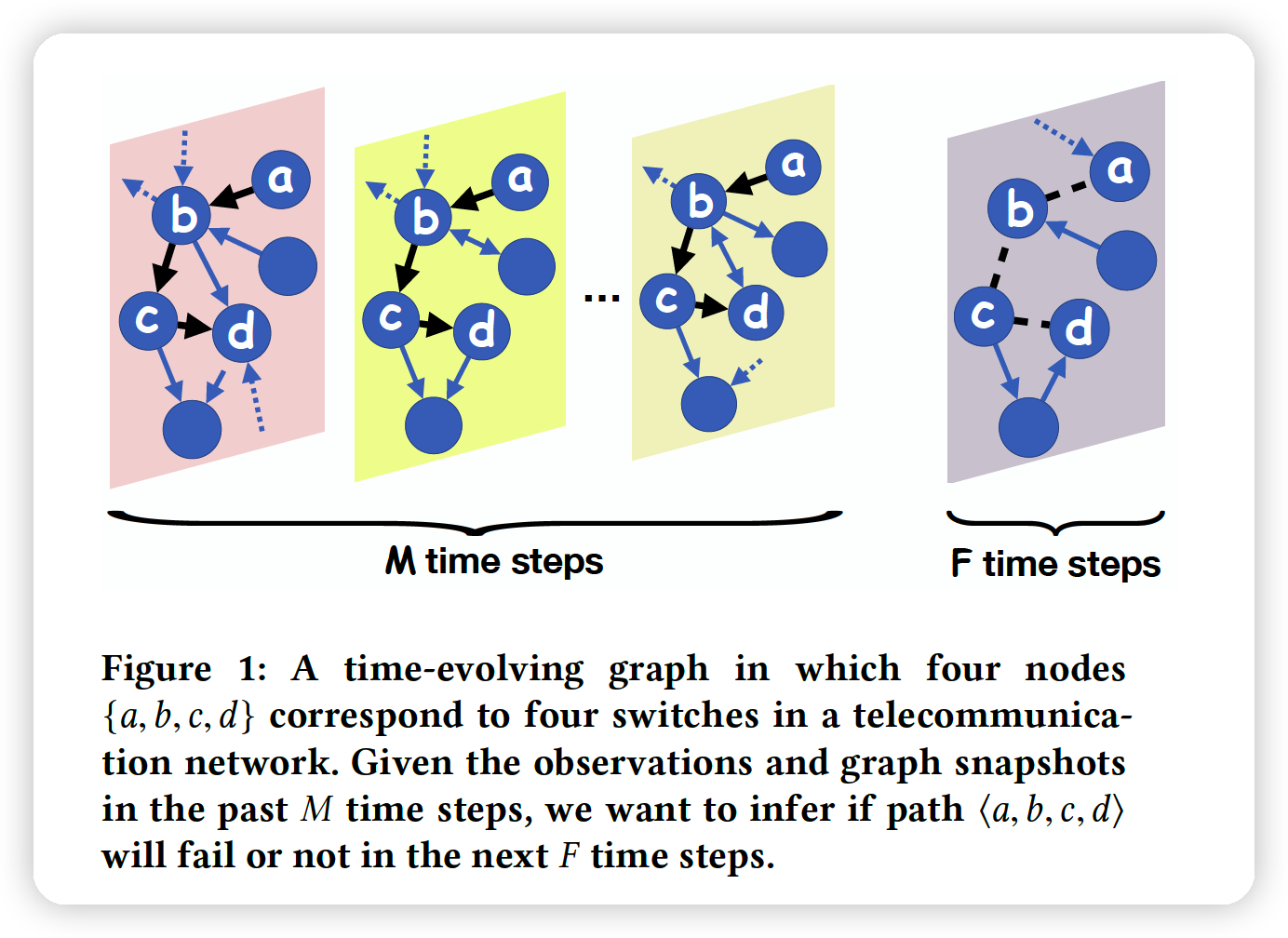
Goal : predict if a given path is available or not in the future
-
For a given path \(p\) at time \(t\),
use past \(M\) time steps
to predict the availability of this path in the next \(F\) time steps.\
-
formulate it as classification problem
-
ex) path failure in telecommunication network
Loss Function :
\(\arg \min \mathcal{L}=-\sum_{\boldsymbol{P}_{j} \in D} \sum_{c=1}^{C} Y_{j c} \log f_{c}\left(\boldsymbol{P}_{j}\right)\).
- train data : \(\boldsymbol{P}_{j}=\left(\left[s_{j}^{t-M+1}, \ldots, s_{j}^{t}\right], p_{j},\left[A^{t-M+1}, \ldots, A^{t}\right]\right)\).
- train label : \(Y_{j} \in\{0,1\}^{C}\) …….. availability of this path
2. Methodology
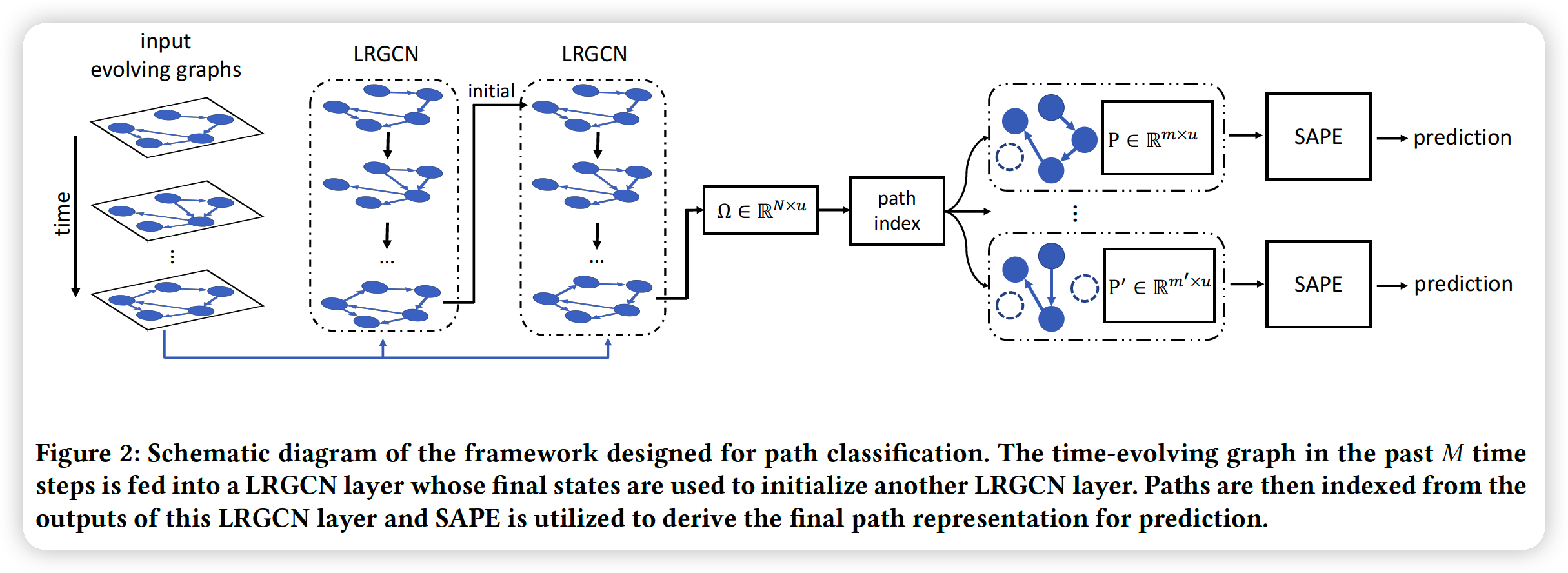
(1) Framework
3 important properties in time-evolving graph
- node correlation
- influence of graph structure dynamics
- node features are influenced by change of graph structure
- temporal dependency
(2) Time-Evolving Graph Modeling
new time-evolving NN
-
to capture “graph structure dynamics” & “temporal dependency” jointly
-
GCN : can not take both \(X\) and evolving structures \(A\) as input
\(\rightarrow\) LRGCN focus on “how to generalize GCN to process TS & evolving graph structures simultaneoulsy”
a) Static Graph modeling
WITHIN on graph snapshot
-
structure does not change = “static”
-
GCN & R-GCN
-
original GCN : deals with “static” graph
-
R-GCN : deal with “multi-relational graph”
- ex) directed graph
-
This paper
-
use R-GCN to model the node correlation in “static & directed graph”
- R-GCN ( ex. for “directed graph” )
- \(Z=\sigma\left(\sum_{\phi \in R}\left(D_{\phi}^{t}\right)^{-1} A_{\phi}^{t} X^{t} W_{\phi}+X^{t} W_{0}\right)\).
- where \(R=\{\) in, out }
- \(A_{i n}^{t}=A^{t}\) & \(A_{o u t}^{t}=\left(A^{t}\right)^{T}\)
- \(\left(D_{\phi}^{t}\right)_{i i}= \sum_{j}\left(A_{\phi}^{t}\right)_{i j} . \sigma(\cdot)\).
- \(Z=\sigma\left(\sum_{\phi \in R}\left(D_{\phi}^{t}\right)^{-1} A_{\phi}^{t} X^{t} W_{\phi}+X^{t} W_{0}\right)\).
- Generalization of R-GCN
- \(Z_{s}=\sigma\left(\sum_{\phi \in R} \tilde{A}_{\phi}^{t} X^{t} W_{\phi}\right)\).
- \[\tilde{A}_{\phi}^{t}=\left(\hat{D}_{\phi}^{t}\right)^{-1} \hat{A}_{\phi}^{t}\]
- \[\hat{A}_{\phi}^{t}=A_{\phi}^{t}+I_{N}\]
- \[\left(\hat{D}_{\phi}^{t}\right)_{i i}=\sum_{j}\left(\hat{A}_{\phi}^{t}\right)_{i j}\]
- \(Z_{s}=\sigma\left(\sum_{\phi \in R} \tilde{A}_{\phi}^{t} X^{t} W_{\phi}\right)\).
- can impose multi-hop normalization by stacking multiple R-GCN
- ex) 2 layer R-GCN : \(\Theta_{s} \star g X^{t}=\sum_{\phi \in R} \tilde{A}_{\phi}^{t} \sigma\left(\sum_{\phi \in R} \tilde{A}_{\phi}^{t} X^{t} W_{\phi}^{(0)}\right) W_{\phi}^{(1)}\)
LR-GCN
- Extend R-GCN to take as inputs 2 adjacent graph snapshots
b) Adjacent Graph Snapshots modeling
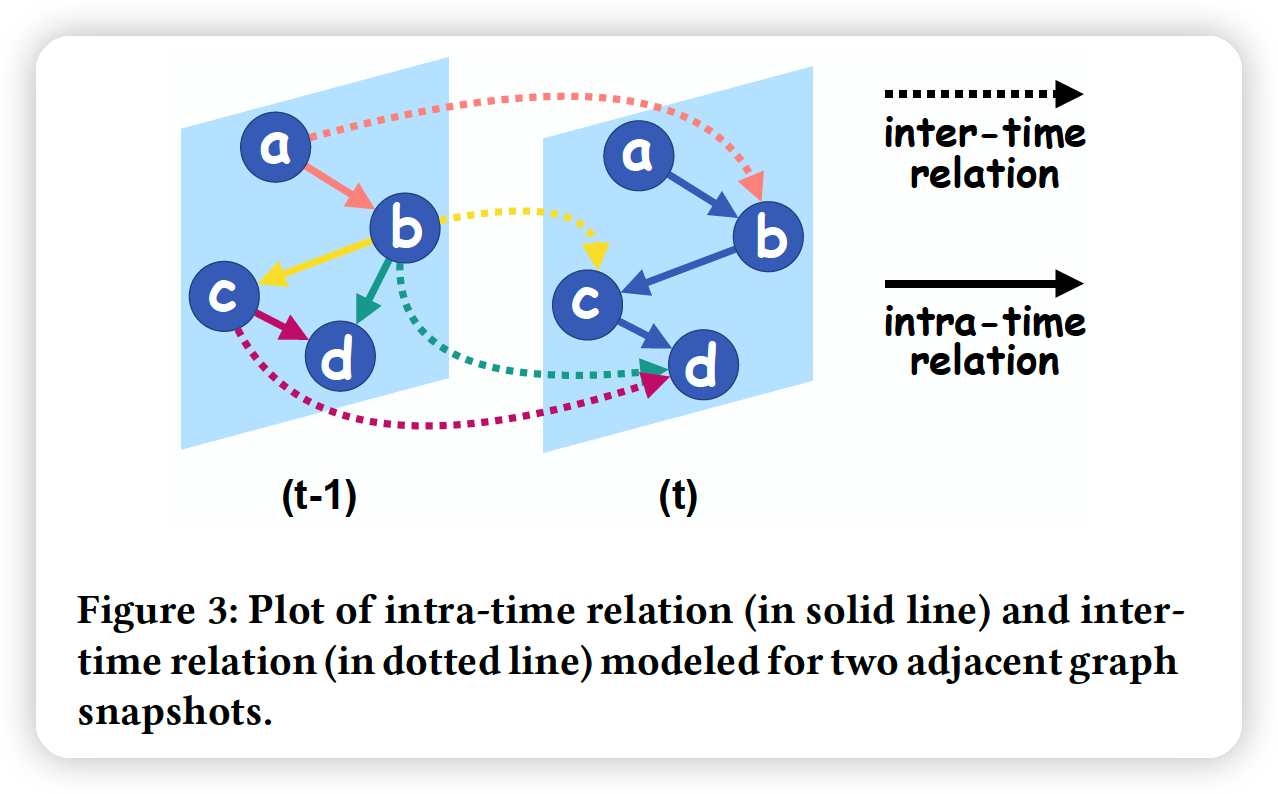
- 2 adjacent time steps ( \(t-1\) & \(t\) )
INTER-time relation
- relationship with nodes in time \(t-1\)
INTRA-time relation
- relationship with nodes in time \(t\)
( both are “asymmetric & directed” relations )
4 types of relations to model in R-GCN
- (1) intra-incoming
- (2) intra-outgoing
- (3) inter-incoming
- (4) inter-outgoing
\(G_{-} \text {unit }\left(\Theta,\left[X^{t}, X^{t-1}\right]\right)=\sigma\left(\Theta_{S} \star g X^{t}+\Theta_{h} \star g X^{t-1}\right)\).
-
\(\Theta_{h}\) : parameters for “inter-time” modeling
( does not change over time )
-
similar role as RNN
c) LRGCN
-
use a \(H^{t-1}\) to memorize the transformed features in the previous snapshots
-
feed \(H^{t-1}\) & \(X^{t}\) into the unit & get \(H^t\)
- \(H^{t}=\sigma\left(\Theta_{H} \star g\left[X^{t}, H^{t-1}\right]\right)\).
-
still problem …… gradient exploding/vanishing
\(\rightarrow\) use LSTM … that is LR-GCN