
MAGNN ( Multi-Scale Adaptive GNN ) for MTS Forecasting (2022)
Contents
- Abstract
- Introduction
- Related Works
- Graph Learning for MTS
- Preliminaries
- Problem Formulation
- GNN
- Methodology
- Framework
- Multi-scale Pyramid Network
- Adaptive Graph Learning
- Multi-scale Temporal GNN
- Scale-wise Fusion
- Output module & Objective function
0. Abstract
Backgound
-
need to consider both complex intra-variable & inter-variable dependencies
-
multi-scale temporal patterns in many real-world MTS
MAGNN
Multi-Scale Adaptive GNN
-
Multi-scale pyramid network
- preserve the underlying temporal dependencies at different time scale
-
Adaptive graph learning module
- to infer the scale specific inter-variable dependencies
-
With (1) & (2)
- (1) multi-scale feature representation
- (2) scale-specific inter-variable dependencies
use MAGNN to jointly model “inter” & “intra” variable dependencies
-
Scale-wise fusion module
- collaboration across different time scales
- automatically capture the importance of contributed temporal patterns
1. Introduction
Exisiting works
(1) only consider temporal dependencies on a SINGLE time scale
-
(reality) daily / weekly /monthly …
-
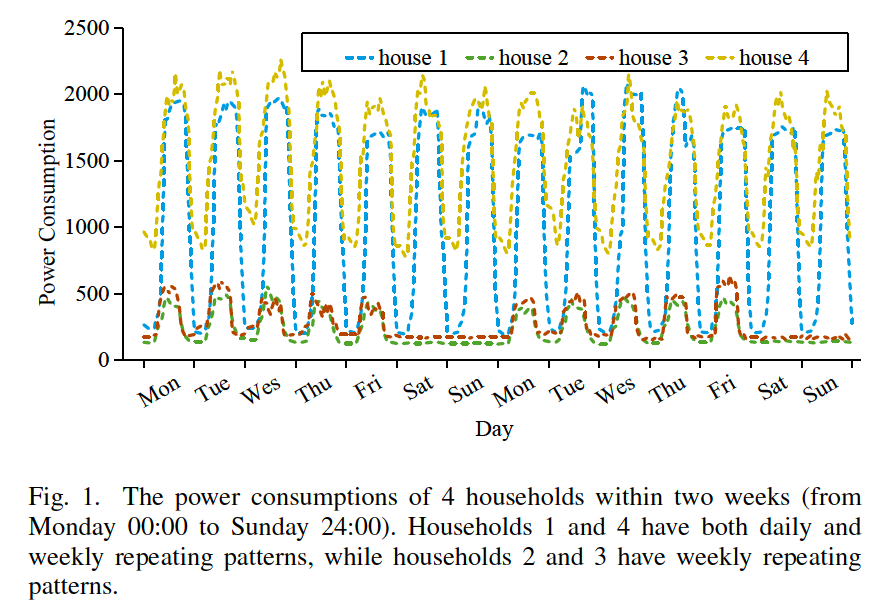
ex) Power Consumption
-
mixture of SHORT & LONG term repeating patterns
( = multi-scale temporal patterns )
-
(2) learn a shared \(A\) matrix to reprsent rich inter-variable dependencies
- makes the models be BIASED to learn 1 type of prominent & shared temporal patterns
\(\rightarrow\) the complicated inter-variable dependencies need to be fully considered! ( when modeling multi-scale temporal patterns )
2. Related Works
(1) Graph Learning for MTS
Challenges of the GNNs-based MTS forecasting
- Obtaining a well-defined graph structure as the inter-variable dependencies
- solution (3 categories) :
- prior-knowledge-based
- rule-based
- learning-based
a) Prior-knowledge based
use extra information ( ex. road networks / physical structures )
problem : require domain knowledge
b) Rule-based
provide data-driven manner to construct the graph structure
ex) causal discovery , entropy-based method, similarity based method
problem : non-parameterized methods \(\rightarrow\) limited flexibility,
( can only learn a kind of specific inter-variable dependency )
c) Learning-based
parameterized moudle to learn pairwise inter-variable
problem : existing works only learn “single inter-variable” dependencies
( make the models biased to learn one type of prominent and
shared temporal patterns among MTS )
3. Preliminaries
(1) Problem Formulation
Notation
- ts : \(\boldsymbol{X}=\left\{\boldsymbol{x}_{1}, \boldsymbol{x}_{2}, \ldots, \boldsymbol{x}_{t}, \ldots, \boldsymbol{x}_{T}\right\}\)
- \(\boldsymbol{X} \in \mathbb{R}^{N \times T}\).
- \(\boldsymbol{x}_{t} \in \mathbb{R}^{N}\).
- predict \(\widehat{\boldsymbol{x}}_{T+h} \in \mathbb{R}^{N}\)
- model : \(\widehat{\boldsymbol{x}}_{T+h}=\mathcal{F}\left(\boldsymbol{x}_{1}, \boldsymbol{x}_{2}, \ldots, \boldsymbol{x}_{T} ; \theta\right)\)
Graph \((V, E)\)
- number of nodes : \(N\)
- \(i\)th node : \(v_{i} \in V\)
- \(\left\{\boldsymbol{x}_{1, i}, \boldsymbol{x}_{2, i}, \ldots, \boldsymbol{x}_{T, i}\right\}\).
-
Edge : \(\left(v_{i}, v_{j}\right) \in E\)
- model : \(\widehat{\boldsymbol{x}}_{T+h}=\mathcal{F}\left(\boldsymbol{x}_{1}, \boldsymbol{x}_{2}, \ldots, \boldsymbol{x}_{T} ; G ; \theta\right) .\)
Weighted Adjacency matrix \(\boldsymbol{A} \in \mathbb{R}^{N \times N}\)
- \(\boldsymbol{A}_{i, j}>0\) if \(\left(v_{i}, v_{j}\right) \in E\)
- \(\boldsymbol{A}_{i, j}=0\) if \(\left(v_{i}, v_{j}\right) \notin E\)
(2) GNN
GCN operation :
- \(\boldsymbol{x} *_{G} \theta=\sigma\left(\theta\left(\widetilde{\boldsymbol{D}}^{-\frac{1}{2}} \widetilde{\boldsymbol{A}} \widetilde{\boldsymbol{D}}^{-\frac{1}{2}}\right) \boldsymbol{x}\right)\).
- \(\widetilde{\boldsymbol{A}}=\boldsymbol{I}_{n}+\boldsymbol{A}\).
- \(\widetilde{\boldsymbol{D}}_{i i}=\sum_{j} \widetilde{\boldsymbol{A}}_{i j}\).
by stacking GCN operations…can aggregate info of multi-order neighbors
4. Methodology
(1) Framework
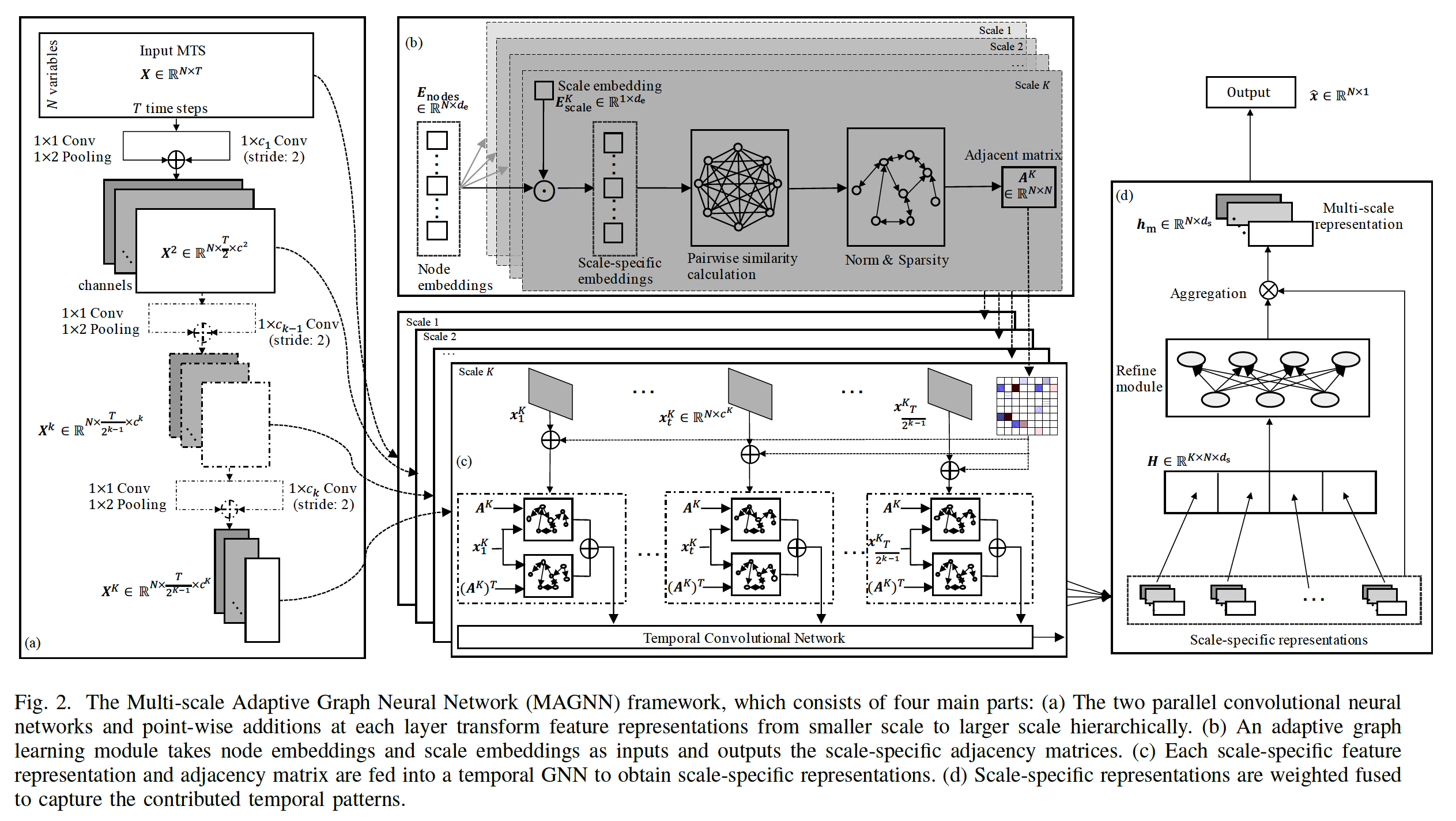
4 main parts
- Multi-scale pyramid networrk
- Adaptive Graph Learning module
- to automatically infer inter-variable dependencies
- Multi-scale temporal GNN
- to capture all kinds of scale-specific temporal patterns
- Scale-wise fusion module
- to effectively promote the collaboration across different scale
(2) Multi-scale Pyramid Network
to preserve the underlying temporal dependencies at different time scales
- small scale : more fine-grained details
- large scale : slow-varying trends
generates multi-scale feature representations ( from each layer )
Input : \(\boldsymbol{X} \in \mathbb{R}^{N \times T}\)
Output : feature representations of \(K\) scales
- \(k\) th scale : \(\boldsymbol{X}^{k} \in \mathbb{R}^{N \times \frac{T}{2^{k-1}} \times c^{k}}\)
- \(\frac{T}{2^{k-1}}\) : sequence length
- \(c^{k}\) : channel size
Model :
- use CNN to capture local patterns
- different filter size in different layer
- beginning layer : LARGE filter
- end layer : SMALL filter
- stride size of convolution is set to 2 to increase the time scale
Details : \(\boldsymbol{X}^{k}=\boldsymbol{X}_{\text {rec }}^{k}+\boldsymbol{X}_{\text {norm }}^{k}\)
- (1) \(\boldsymbol{X}_{\mathrm{rec}}^{k}=\operatorname{ReLU}\left(\boldsymbol{W}_{\mathrm{rec}}^{k} \otimes \boldsymbol{X}^{k-1}+\boldsymbol{b}_{\mathrm{rec}}^{k}\right)\)
- using only 1 CNN … not flexible!
- (2) \(\boldsymbol{X}_{\mathrm{norm}}^{k}=\operatorname{Pooling}\left(\operatorname{ReLU}\left(\boldsymbol{W}_{\mathrm{norm}}^{k} \otimes \boldsymbol{X}^{k-1}+\boldsymbol{b}_{\mathrm{norm}}^{k}\right)\right)\)
- use 1 more (parallel) CNN ( kernel size 1x1 & 1x2 pooling layer )
Summary : the learned multi-scale feature representations are flexible and comprehensive to preserve various kinds of temporal dependencies
( to avoid the interaction between the variables of MTS, the convolutional operations are performed on the time dimension )
(3) Adaptive Graph Learning
Automatically generates \(A\) matrix
- existing methods ) only learrns SHARED \(A\)
- essential to learn MULTIPLE SCALE-SPECIFIC \(A\)
But, directly learning a unique \(A\) … to costly! ( too many parameters )
\(\rightarrow\) propose a AGL (Adaptive Graph Learning) module!
AGL initializes 2 parameters
- (1) shared node embeddings : \(\boldsymbol{E}_{\text {nodes }} \in \mathbb{R}^{N \times d_{\mathrm{e}}}\)
- SAME across all scales & \(d_{\mathrm{e}} \ll N ; 2\)
- (2) scale embeddings : \(\boldsymbol{E}_{\text {scale }} \in \mathbb{R}^{K \times d_{e}}\)
- DIFFERENT across all scales
AGL module includes…
- (1) shared node embeddings
- (2) \(K\) scale-specific layers
Procedure
-
step 1) \(\boldsymbol{E}_{\text {nodes }}\) are randomly initialized
-
step 2) \(\boldsymbol{E}_{\text {nodes }}\) are fed into scale-specific layer
-
( for \(k^{th}\) layer ) \(\boldsymbol{E}_{\text {scale }}^{k} \in \mathbb{R}^{1 \times d_{e}}\) are randomly initiailized
-
then, \(\boldsymbol{E}_{\text {spec }}^{k}=\boldsymbol{E}_{\text {nodes }} \odot \boldsymbol{E}_{\text {scale }}^{k}\), where \(\boldsymbol{E}_{\text {spec }}^{k} \in \mathbb{R}^{N \times d_{\mathrm{e}}}\)
-
\(\boldsymbol{E}_{\text {spec }}^{k}\) : scale-specific embedding in \(k^{th}\) layer
( contains both node & scale-spcific information )
-
-
-
step 3) calculate pairwise node similarities
- \(\begin{aligned} \boldsymbol{M}_{1}^{k} &=\left[\tanh \left(\boldsymbol{E}_{\mathrm{spec}}^{k} \theta^{k}\right)\right]^{T} \\ \boldsymbol{M}_{2}^{k} &=\tanh \left(\boldsymbol{E}_{\mathrm{spec}}^{k} \varphi^{k}\right) \\ \boldsymbol{A}_{\text {full }}^{k} &=\operatorname{Re} L U\left(\boldsymbol{M}_{1}^{k} \boldsymbol{M}_{2}^{k}-\left(\boldsymbol{M}_{2}^{k}\right)^{T}\left(\boldsymbol{M}_{1}^{k}\right)^{T}\right) \end{aligned}\).
- \(\boldsymbol{A}_{\text {full }}^{k} \in \mathbb{R}^{N \times N}\) are then normalized to \(0-1\)
-
step 4) make adjacency matrix SPARSE
- \(\boldsymbol{A}^{k}=\operatorname{Sparse}\left(\operatorname{Softmax}\left(\boldsymbol{A}_{\text {full }}^{k}\right)\right)\).
- Sparse function :
- \(\boldsymbol{A}_{i j}^{k}=\left\{\begin{array}{ll} \boldsymbol{A}_{i j}^{k}, & \boldsymbol{A}_{i j}^{k} \in \operatorname{Top} K\left(\boldsymbol{A}_{i *}^{k}, \tau\right) \\ 0, & \boldsymbol{A}_{i j}^{k} \notin \operatorname{Top} K\left(\boldsymbol{A}_{i *}^{k}, \tau\right) \end{array}\right.\).
-
step 5) get SCALE-SPECIFIC \(A\)
- \(\left\{\boldsymbol{A}^{1}, \ldots, \boldsymbol{A}^{k}, \ldots, \boldsymbol{A}^{K}\right\}\).
(4) Multi-scale Temporal GNN
2 inputs
- (1) \(\left\{\boldsymbol{X}^{1}, \ldots, \boldsymbol{X}^{k}, \ldots, \boldsymbol{X}^{K}\right\}\) ( from multi-scale pyramid network)
- (2) \(\left\{\boldsymbol{A}^{1}, \ldots, \boldsymbol{A}^{k}, \ldots, \boldsymbol{A}^{K}\right\}\) ( from AGL module )
MTG (Multi-scale Temporal GNN)
- capture scale-specific temporal patterns across time steps & variables
Existing works
- GRU + GNN : gradient vanishing/exploding
- TCNs : very good!
\(\rightarrow\) combine GNN & TCNs ( insead of GRU )
details of MTG
-
\(K\) temporal GNN ( TCN + GNN )
-
for \(k^{th}\) scale, split \(\mathbf{X}^{k}\) at time dimension
\(\rightarrow\) obtain \(\left\{\boldsymbol{x}_{1}^{k}, \ldots, \boldsymbol{x}_{t}^{k}, \ldots, \boldsymbol{x}_{\frac{T}{2 k-1}}^{k}\right\}\left(\boldsymbol{x}_{t}^{k} \in \mathbb{R}^{N \times c^{k}}\right)\)
-
use 2 GNNs, to capture both IN & OUT coming information
- \(\widetilde{\boldsymbol{h}}_{t}^{k}=G N N_{\mathrm{in}}^{k}\left(\boldsymbol{x}_{t}^{k}, \boldsymbol{A}^{k}, \boldsymbol{W}_{\mathrm{in}}^{k}\right)+G N N_{\mathrm{out}}^{k}\left(\boldsymbol{x}_{t}^{k},\left(\boldsymbol{A}^{k}\right)^{T}, \boldsymbol{W}_{\mathrm{out}}^{k}\right)\).
-
then, obtain \(\left\{\widetilde{\boldsymbol{h}}_{1}^{k}, \ldots, \widetilde{\boldsymbol{h}}_{t}^{k}, \ldots, \widetilde{\boldsymbol{h}}_{\frac{T}{2^{k}}}^{k}\right\}\)
\(\rightarrow\) fed into TCN & obtain \(\tilde{\mathbf{h}}\)
\(\boldsymbol{h}^{k}=\operatorname{TCN} N^{k}\left(\left[\widetilde{\boldsymbol{h}}_{1}^{k}, \ldots, \widetilde{\boldsymbol{h}}_{t}^{k}, \ldots, \widetilde{\boldsymbol{h}}_{\frac{T}{2^{k}}}^{k}\right], \boldsymbol{W}_{\mathrm{tcn}}^{k}\right)\).
Advantages of using MTG
- (1) capture SCALE-SPECIFIC temporal patterns
- (2) GCN operators enables the model to consider INTER-variable dependencies
(5) Scale-wise Fusion
Input : scale-specific representations
- \(\left\{\boldsymbol{h}^{1}, \ldots, \boldsymbol{h}^{k}, \ldots, \boldsymbol{h}^{K}\right\}\), where \(\boldsymbol{h}^{k} \in \mathbb{R}^{N \times d_{\mathrm{s}}}\)
- \(d_{\mathrm{s}}\) : output dimension of TCN
Intuitive solution : concatenate them / global pooling
\(\rightarrow\) problem : treats them equally!
\(\rightarrow\) propose a scalewise fusion module
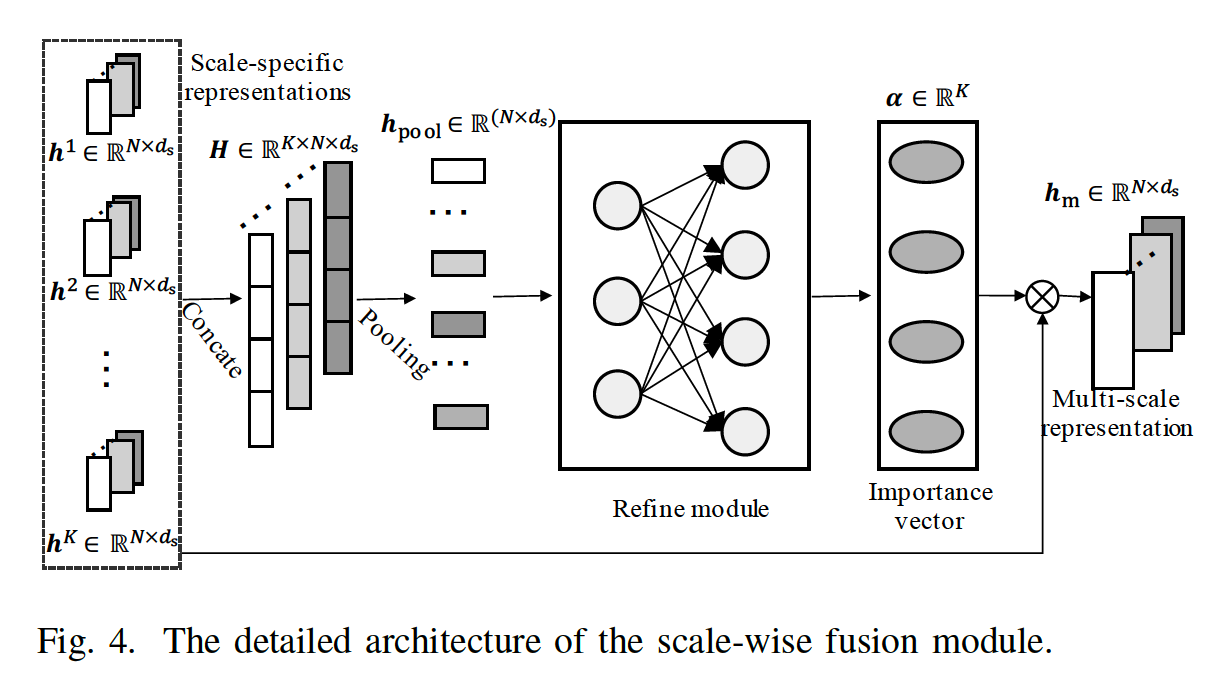
Details
-
step 1) concatenate
- \(\boldsymbol{H}=\operatorname{Concat}\left(\boldsymbol{h}^{1}, \ldots, \boldsymbol{h}^{k}, \ldots, \boldsymbol{h}^{K}\right)\)….\(\boldsymbol{H} \in \mathbb{R}^{K \times N \times d_{s}}\)
-
step 2) average pooling ( on scale dimension)
- \(\boldsymbol{h}_{\mathrm{pool}}=\frac{\sum_{k=1}^{K} \boldsymbol{H}^{k}}{K}\)………. \(h_{\text {pool }} \in \mathbb{R}^{1 \times N \times d_{\mathrm{s}}}\)
-
step 3) flatten
-
step 4) fed into refining module
-
\(\begin{aligned} &\boldsymbol{\alpha}_{1}=\operatorname{ReLU}\left(\boldsymbol{W}_{1} \boldsymbol{h}_{\mathrm{pool}}+\boldsymbol{b}_{1}\right) \\ &\boldsymbol{\alpha}=\operatorname{Sigmoid}\left(\boldsymbol{W}_{2} \boldsymbol{\alpha}_{1}+\boldsymbol{b}_{2}\right) \end{aligned}\).
( = importance score ( importance of scale-specific representation ) )
-
-
step 5) weighted average & ReLU
-
\(\boldsymbol{h}_{\mathrm{m}}=\operatorname{ReLU}\left(\sum_{k=1}^{K} \boldsymbol{\alpha}[k] \times \boldsymbol{h}^{k}\right)\).
( = final multi-scale representation)
-
(6) Output Module & Objective function
Output layer : 1\(\times d_s\) CNN & \(1\times1\) CNN
-
Input : \(\boldsymbol{h}_{\mathrm{m}} \in \mathbb{R}^{N \times d_{\mathrm{s}}}\)
-
Output : \(\widehat{\boldsymbol{x}} \in \mathbb{R}^{N \times 1}\)
Loss Function : \(\mathcal{L}_{2}=\frac{1}{\mathcal{T}_{\text {train }}} \sum_{i=1}^{\mathcal{T}_{\text {rain }}} \sum_{j=1}^{N}\left(\widehat{\boldsymbol{x}}_{i, j}-\boldsymbol{x}_{i, j}\right)^{2}\).