
Learning to Propagate Labels : Transductive Propagation Network for Few shot Learning
Contents
- Abstract
- Introduction
- Related Works
- Meta Learning
- Embedding & Metric Learning approaches
- Transduction
- Main Approach
- Problem Definition
- Transductive Propagation Network (TPN)
- Feature Embedding
- Graph Construction
- Label Propagation
- Classification Loss Generation
0. Abstract
Few-shot learning의 목표 :
- learn a (1) classifier
- that (2) generalizes well
- even when trained with a (3) limited number of training instances per class
이 논문에서는 이를 풀기 위한 TPN을 제안
Transductive Propagation Network (TPN)
-
classify entire test set AT ONCE
-
learn to propagate labels
-
labeled instances \(\rightarrow\) unlabeled test instances
( 방법 : graph construction module …. 데이터의 manifold structure를 찾아내! )
-
-
jointly learn (1) & (2)
- (1) parameters of feature embedding
- (2) graph construction
-
end-to-end
1. Introduction
DL은 large amount of labeled data에 매우 의존적
- 그렇지 않으면, over-fitting issue
- Vinyal et al (2016)
- propose meta-learning strategy
- learns over diverse classification tasks, over large number of episodes
- 각 episode :
- Support set으로 embedding 학습
- Unlabeled 데이터인 Query set으로 prediction
- episode training 방식으로 하는 이유 : test & train 상황 맞추기 위해!
Fundamental difficulty
-
아무리 episode training 방식이 few-shot learning에 맞춤형이라 하더라도, 본질적인 scarce data problem은 어쩔 수 없다.
-
이를 해결하기 위해, consider relationships between instances in the test set
\(\rightarrow\) 이들을 통채로(as a whole) 예측한다! 이를 TRANSDUCTION (혹은 transductive inference)라고 한다
Transductive inference
-
outperform inductive method
( inductive : one-by-one prediction )
-
대표적 방법 : construct network on BOTH labeled & unlabeled data
그런 뒤, propagate labels!
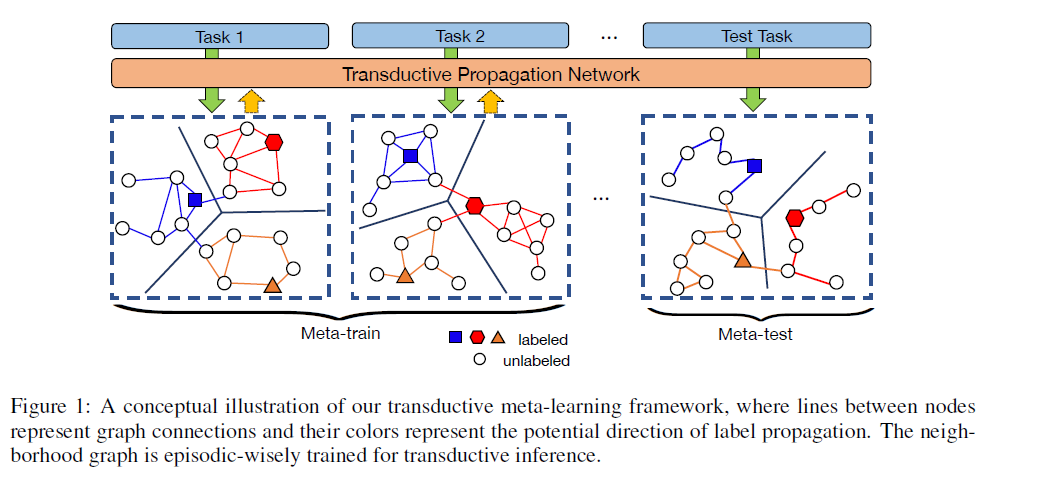
Transductive Propagation Network (TPN)
핵심 특징들
- deal with low-data problem
- transductive inference를 위해 ENTIRE query set을 사용한다
알고리즘 개요
- step 1) DNN 사용하여 embedding space로 input을 mapping
- step 2) graph construction module을 사용하여 manifold structure를 잡아낸다
Main Contribution
-
1) few-shot learning에 transductive inference를 expliclitly하게 model한 최초 알고리즘
( 기존에 Nichol et al (2018)에서 제안했던 방법 : only share information between text examples by BN )
-
2) propose to learn to propagate labels
2. Related Works
(a) Meta-learning
- tries to optimize over..
- batches of tasks (O)
- batches of data points (X)
- [alg 1] MAML
- find more transferable representations with “sensitive” parameters
- [alg 2] Reptile
- first-order meta-learning approach
- FOMAML (first-order MAML) 와 유사, but train-test split 안해
위 두 알고리즘에 비해, TPN는 closed-form solution for label propagation on query points
\(\rightarrow\) inner update에서 gradient computation 불필요
(b) Embedding & Metric Learning approaches
few-shot learning을 푸는 또 다른 방법 : metric learning approaches
-
[alg 1] Matching Networks
-
support set 사용하여 weighted nearest neighbor classifier 학습
-
adjust feature embedding
( according to the performance on the query set )
-
-
[alg 2] Prototypical Networks
- class 별 prototype을 계산 ( = mean of support set)
-
[alg 3] Relation Network
- learn a deep distance metric to compare a small number of images within episodes
(c) Transduction
- [alg 1] Transductive Support Vector Machines (TSVMs)
- margin-based classification
- minimize errors of particular test set
- [alg 2] Label Propagation
- transfer labels ( labeled \(\rightarrow\) unlabeled )
- guided by weighted graph
- [alg 3] NIchol et al (2018)
- few shot learning에 transductive setting 적용
- BUT, only share information between “test examples” via BN
3. Main Approach
주어진 few-shot classification task의 manifold structure를 활용한다!
3-1. Problem Definition
Dataset
- \(\mathcal{C}_{\text {train }}\) : Large + Labeled
- \(\mathcal{C}_{\text {test }}\) : 오직 일부만이 Labeled ( 대부분 Unlabeled )
Episode
-
step 1) sample small subset of \(N\) classes from \(\mathcal{C}_{\text {train }}\)
-
step 2) 여기서 뽑힌 데이터를 support & query set으로 나눔
-
(1) support set : \(K\) examples from \(N\) classes ( = N-way K-shot learning )
\[\mathcal{S}=\left\{\left(\mathbf{x}_{1}, y_{1}\right),\left(\mathbf{x}_{2}, y_{2}\right), \ldots,\left(\mathbf{x}_{N \times K}, y_{N \times K}\right)\right\}.\]- episode 내에서 training set의 역할을 함
-
(2) query set : support set과는 다른 데이터 ( class는 똑같아 )
\(\mathcal{Q}=\left\{\left(\mathrm{x}_{1}^{*}, y_{1}^{*}\right),\left(\mathrm{x}_{2}^{*}, y_{2}^{*}\right), \ldots,\left(\mathrm{x}_{T}^{*}, y_{T}^{*}\right)\right\}\).
- episode 내에서 query set에 대한 loss를 minimize하도록 학습
-
episodic training을 사용한 Meta-learning 방법들은 few-shot classification 문제에서 잘 작동한다.
하지만, 여전히 lack of labeled instances! (\(K\)로는 부족해….)
\(\rightarrow\) Transductive setting을 사용하게끔 하는 배경!
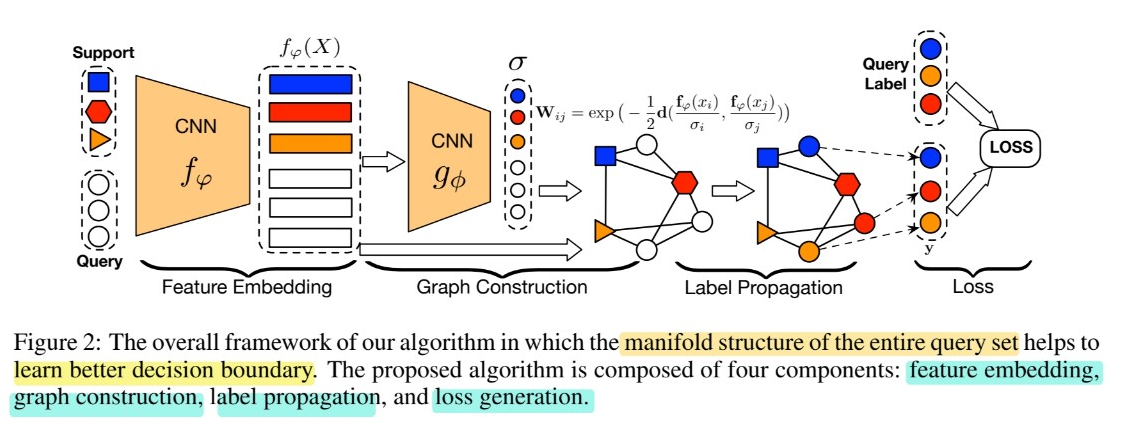
3-2. Transductive Propagation Networks (TPN)
4개의 구성 요소
- Feature embedding ( with CNN )
- Graph construction
- example-wise parameters to exploit manifold structure
- Label propagation : \(\mathcal{S} \rightarrow \mathcal{Q}\)
- Loss generation
- \(\mathcal{Q}\)에 대해, propagated label & ground 사이의 Cross Entropy loss 계산
(a) Feature Embedding
- feature extraction 위해 CNN \(f_{\varphi}\) 사용
- \(f_{\varphi}\left(\mathrm{x}_{i} ; \varphi\right)\) : feature map
- SAME embedding function \(f_{\varphi}\) for both \(\mathcal{S}\) & \(\mathcal{Q}\).
(b) Graph Construction
(1) Manifold learning이란?
-
discovers the embedded LOW-dimensional subspace in the data
-
critical to choose an appropriate neighborhood graph.
-
자주 사용하는 function :
Gaussian similarity function : \(W_{i j}=\exp \left(-\frac{d\left(\mathrm{x}_{i}, \mathrm{x}_{j}\right)}{2 \sigma^{2}}\right)\)
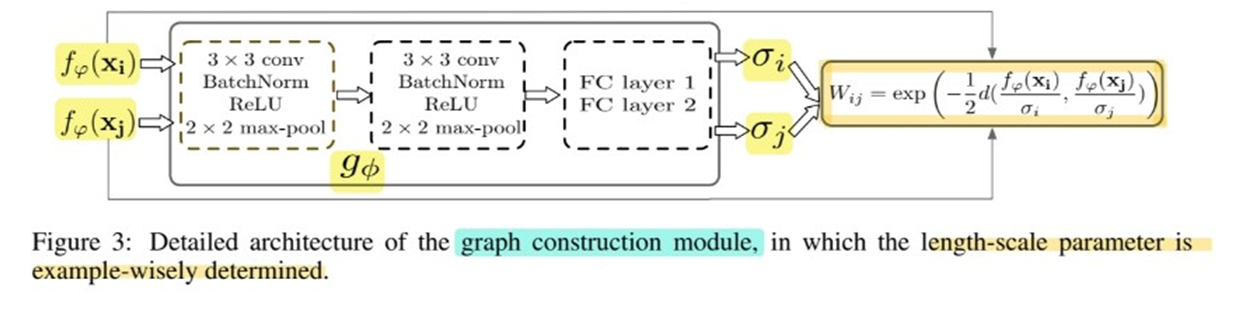
(2) Example-wise length-scale parameter, $\sigma_i$.
-
proper neighborhood graph를 얻기 위해, UNION set of \(\mathcal{S} \& \mathcal{Q}\)를 사용한다
-
\(\sigma_{i}=g_{\phi}\left(f_{\varphi}\left(\mathrm{x}_{i}\right)\right)\).
- \(g_{\phi}\) : CNN
- \(f_{\varphi}\left(\mathrm{x}_{i}\right)\) : input으로 들어가는 feature map
-
이렇게 생성된 example-wise length-scale parameter인 \(\sigma_i\)는,
아래 similarity function에 input!
\(W_{i j}=\exp \left(-\frac{1}{2} d\left(\frac{f_{\varphi}\left(\mathrm{x}_{\mathrm{i}}\right)}{\sigma_{i}}, \frac{f_{\varphi}\left(\mathrm{x}_{\mathrm{j}}\right)}{\sigma_{j}}\right)\right)\)….. \(W \in R^{(N \times K+T) \times(N \times K+T)}\).
-
이렇게 해서 나온 \(W\)에 normalized graph Laplacians을 적용 ( \(S=D^{-1/2}WD^{-1/2}\) )
(3) Graph Construction structure
(4) Graph Construction in each episode
-
graph is INDIVIDUALLY constructed for EACH TASK in EACH EPISODE
( 위의 figure 1 참조 )
-
ex) 5-way 5-shot training ( \(N=5, K=5, T=75\) )
\(\rightarrow\) \(W\)는 고작 100 x 100 차원 ( 꽤 efficient )
(c) Label Propagation
How to get predictions for \(\mathcal{Q}\) using label propagation?
Notation
- \(\mathcal{F}\) : \((N \times K+T) \times N\) matrix with non-neg entries
- \(N \times K\) 개의 Support Set & \(T\)개의 Query Set
- label matrix \(Y \in \mathcal{F}\)
- \(Y_{i j}=1\) ……… if \(\mathbf{x}_{i}\) is from the support set & labeled as \(y_{i}=j\),
- \(Y_{i j}=0\) ……… otherwise ( = label이 없거나, 틀리거나 )
\(Y\)에서 시작해서, iterative하게 determine
-
\[F_{t+1}=\alpha S F_{t}+(1-\alpha) Y\]
- \(S\)는 normalized weight
- \(\alpha\)는 얼마나 propagate 조절할지 결정
- [최종] closed form solution : \(F^{*}=(I-\alpha S)^{-1} Y\)
Time complexity :
- matrix inversion : \(O(n^3)\)
- 하지만, 여기서 \(n = N \times K + T\) … 매우 작다! efficient
(d) Classification Loss Generation
다음 둘 ( \(F^{*}\) & ground truth )의 차이를 loss로 계산
- 1) \(F^{*}\) : predictions of the \(\mathcal{S} \cup \mathcal{Q}\) ( via label propagation )
- 2) ground truth
\(F^{*}\)는 softmax를 통해 probabilistic score로 변환된다.
- \(P\left(\tilde{y}_{i}=j \mid \mathbf{x}_{i}\right)=\frac{\exp \left(F_{i j}^{*}\right)}{\sum_{j=1}^{N} \exp \left(F_{i j}^{*}\right)}\).
Loss Function :
- \(J(\varphi, \phi)=\sum_{i=1}^{N \times K+T} \sum_{j=1}^{N}-\mathbb{I}\left(y_{i}==j\right) \log \left(P\left(\tilde{y}_{i}=j \mid \mathbf{x}_{i}\right)\right)\).