
( Skip the basic parts + not important contents )
11.Sampling Methods
For most probabilsitic models, exact inference is INTRACTABLE!
\(\rightarrow\) Ch11 : approximate inference based on numerical sampling, known as Monte Carlo techniques
Goal : evaluate \(\mathbb{E}[f]=\int f(\mathbf{z}) p(\mathbf{z}) \mathrm{d} \mathbf{z}\)
- using finite sum : \(\widehat{f}=\frac{1}{L} \sum_{l=1}^{L} f\left(\mathbf{z}^{(l)}\right)\)
- variance of the estimator : \(\operatorname{var}[\widehat{f}]=\frac{1}{L} \mathbb{E}\left[(f-\mathbb{E}[f])^{2}\right]\)
However, samples \(\mathbf{z}^{(l)}\) may not be independent!
( thus, effective sample size might be much smaller than the apparent sample size )
11-1. Basic Sampling Algorithms
11-1-1. Standard distributions
skip
11-1-2. Rejection Sampling
sample from complex distn
wish to sample from \(p(z)\), which \(p(z)=\frac{1}{Z_{p}} \widetilde{p}(z)\)
- sampling is hard
- evaluation is easy
1) use “proposal distribution” \(q(z)\)
- more simple distribution
2) introduce constant \(k\)
- where \(k q(z) \geqslant \widetilde{p}(z)\)
- \(k q(z)\) : comparison function
Algorithm
-
[step 1] generate \(z_0\) from \(q(z)\)
-
[step 2] generate \(u_0\) from \(\text{Unif}(0,kq(z_0))\)
-
[step 3] if $u_{0}>\widetilde{p}\left(z_{0}\right)$ : reject
( o.w : accept )
11-1-3. Adaptive rejection sampling
skip
11-1-4. Importance sampling
Finite sum approximation to expectation
(1) discrete \(z\) space into a uniform grid
(2) evaluate the integrand as a sum : \(\mathbb{E}[f] \simeq \sum_{l=1}^{L} p\left(\mathbf{z}^{(l)}\right) f\left(\mathbf{z}^{(l)}\right)\).
Problem : summation grows exponentially with the dim of \(z\)
Normalized case
finite sum over samples \(\left\{\mathbf{z}^{(l)}\right\}\) drawn from \(q(\mathbf{z})\) :
\(\begin{aligned} \mathbb{E}[f] &=\int f(\mathbf{z}) p(\mathbf{z}) \mathrm{d} \mathbf{z} \\ &=\int f(\mathbf{z}) \frac{p(\mathbf{z})}{q(\mathbf{z})} q(\mathbf{z}) \mathrm{d} \mathbf{z} \\ & \simeq \frac{1}{L} \sum_{l=1}^{L} \frac{p\left(\mathbf{z}^{(l)}\right)}{q\left(\mathbf{z}^{(l)}\right)} f\left(\mathbf{z}^{(l)}\right) \end{aligned}\).
we call \(r_{l}=p\left(\mathbf{z}^{(l)}\right) / q\left(\mathbf{z}^{(l)}\right)\), importance weights
Unnormalized case
\(p(\mathrm{z})\) can only be evaluated up to a normalization constant
( \(p(\mathrm{z})=\widetilde{p}(\mathrm{z}) / Z_{p}\) )
\(\begin{aligned} \mathbb{E}[f] &=\int f(\mathbf{z}) p(\mathbf{z}) \mathrm{d} \mathbf{z} \\ &=\frac{Z_{q}}{Z_{p}} \int f(\mathbf{z}) \frac{\widetilde{p}(\mathbf{z})}{\widetilde{q}(\mathbf{z})} q(\mathbf{z}) \mathrm{d} \mathbf{z} \\ & \simeq \frac{Z_{q}}{Z_{p}} \frac{1}{L} \sum_{l=1}^{L} \widetilde{r}_{l} f\left(\mathbf{z}^{(l)}\right) \end{aligned}\).
where \(\tilde{r}_{l}=\tilde{p}\left(\mathbf{z}^{(l)}\right) / \widetilde{q}\left(\mathbf{z}^{(l)}\right) .\)
since \(\begin{aligned} \frac{Z_{p}}{Z_{q}} &=\frac{1}{Z_{q}} \int \tilde{p}(\mathbf{z}) \mathrm{d} \mathbf{z}=\int \frac{\tilde{p}(\mathbf{z})}{\widetilde{q}(\mathbf{z})} q(\mathbf{z}) \mathrm{d} \mathbf{z} \simeq \frac{1}{L} \sum_{l=1}^{L} \widetilde{r}_{l} \end{aligned}\)
\(\mathbb{E}[f] \simeq \sum_{l=1}^{L} w_{l} f\left(\mathbf{z}^{(l)}\right)\), where \(w_{l}=\frac{\tilde{r}_{l}}{\sum_{m} \tilde{r}_{m}}=\frac{\tilde{p}\left(\mathbf{z}^{(l)}\right) / q\left(\mathbf{z}^{(l)}\right)}{\sum_{m} \tilde{p}\left(\mathbf{z}^{(m)}\right) / q\left(\mathbf{z}^{(m)}\right)}\)
11-1-5. Sampling-importance-resampling
skip
11-1-6. Sampling and the EM algorithm
skip
11-2. MCMC
Metropolis algorithm
- when proposal distribution is symmetric
- acceptance probability : \(A\left(\mathrm{z}^{\star}, \mathrm{z}^{(\tau)}\right)=\min \left(1, \frac{\tilde{p}\left(\mathrm{z}^{\star}\right)}{\widetilde{p}\left(\mathrm{z}^{(\tau)}\right)}\right)\).
Metropolis Hastings algorithm
-
when proposal distribution does not need to be symmetric
-
acceptance probability : \(A_{k}\left(\mathrm{z}^{\star}, \mathrm{z}^{(\tau)}\right)=\min \left(1, \frac{\tilde{p}\left(\mathrm{z}^{\star}\right) q_{k}\left(\mathrm{z}^{(\tau)} \mid \mathrm{z}^{\star}\right)}{\tilde{p}\left(\mathrm{z}^{(\tau)}\right) q_{k}\left(\mathrm{z}^{\star} \mid \mathrm{z}^{(\tau)}\right)}\right)\)
-
pf) detailed balance is satisfied!
\(\begin{aligned} p(\mathbf{z}) q_{k}\left(\mathbf{z} \mid \mathbf{z}^{\prime}\right) A_{k}\left(\mathbf{z}^{\prime}, \mathbf{z}\right) &=\min \left(p(\mathbf{z}) q_{k}\left(\mathbf{z} \mid \mathbf{z}^{\prime}\right), p\left(\mathbf{z}^{\prime}\right) q_{k}\left(\mathbf{z}^{\prime} \mid \mathbf{z}\right)\right) \\ &=\min \left(p\left(\mathbf{z}^{\prime}\right) q_{k}\left(\mathbf{z}^{\prime} \mid \mathbf{z}\right), p(\mathbf{z}) q_{k}\left(\mathbf{z} \mid \mathbf{z}^{\prime}\right)\right) \\ &=p\left(\mathbf{z}^{\prime}\right) q_{k}\left(\mathbf{z}^{\prime} \mid \mathbf{z}\right) A_{k}\left(\mathbf{z}, \mathbf{z}^{\prime}\right) \end{aligned}\).
11-3. Gibbs sampling
- Initialize \(\left\{z_{i}: i=1, \ldots, M\right\}\)
- For \(\tau=1, \ldots, T:\) \(-\) Sample \(z_{1}^{(\tau+1)} \sim p\left(z_{1} \mid z_{2}^{(\tau)}, z_{3}^{(\tau)}, \ldots, z_{M}^{(\tau)}\right)\) \(-\) Sample \(z_{2}^{(\tau+1)} \sim p\left(z_{2} \mid z_{1}^{(\tau+1)}, z_{3}^{(\tau)}, \ldots, z_{M}^{(\tau)}\right)\) : \(-\) Sample \(z_{j}^{(\tau+1)} \sim p\left(z_{j} \mid z_{1}^{(\tau+1)}, \ldots, z_{j-1}^{(\tau+1)}, z_{j+1}^{(\tau)}, \ldots, z_{M}^{(\tau)}\right)\) : Sample \(z_{M}^{(\tau+1)} \sim p\left(z_{M} \mid z_{1}^{(\tau+1)}, z_{2}^{(\tau+1)}, \ldots, z_{M-1}^{(\tau+1)}\right)\)
Acceptance ratio = (always) 1
pf) \(A\left(\mathrm{z}^{\star}, \mathrm{z}\right)=\frac{p\left(\mathrm{z}^{\star}\right) q_{k}\left(\mathrm{z} \mid \mathrm{z}^{\star}\right)}{p(\mathrm{z}) q_{k}\left(\mathrm{z}^{\star} \mid \mathrm{z}\right)}=\frac{p\left(z_{k}^{\star} \mid \mathrm{z}_{\backslash k}^{\star}\right) p\left(\mathrm{z}_{\backslash k}^{\star}\right) p\left(z_{k} \mid \mathrm{z}_{\backslash k}^{\star}\right)}{p\left(z_{k} \mid \mathrm{z} \backslash k\right) p(\mathrm{z} \backslash k) p\left(z_{k}^{\star} \mid \mathrm{z} \backslash k\right)}=1\)
11-4. Slice Sampling
difficulties of Metropolis : “sensitive to step size”
- too small : slow decorrelation
- too large : inefficiency due to high rejection rate
Slice sampling : provides an “adaptive step size”
Involves augmenting \(z\) with an additional variable \(u\)
then, draw samples from joint \((z,u)\) space
Goal : sample from \(\hat{p}(z, u)=\left\{\begin{array}{ll} 1 / Z_{p} & \text { if } 0 \leqslant u \leqslant \tilde{p}(z) \\ 0 & \text { otherwise } \end{array}\right.\)
where \(Z_{p}=\int \tilde{p}(z) \mathrm{d} z .\)
It is okay to sample from \(\hat{p}(z, u)\) and then just discard \(u\)
\(\int \hat{p}(z, u) \mathrm{d} u=\int_{0}^{\widetilde{p}(z)} \frac{1}{Z_{p}} \mathrm{~d} u=\frac{\tilde{p}(z)}{Z_{p}}=p(z)\).
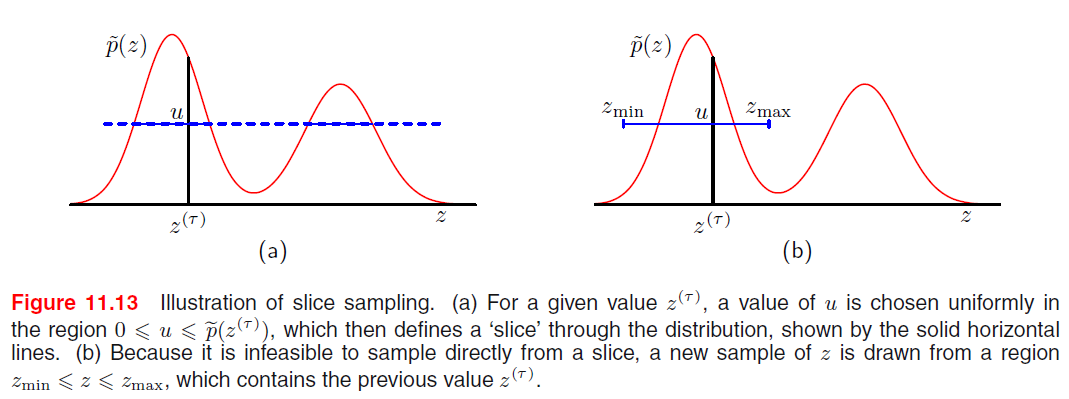
Algorithm : alternately sample \(z\) and \(u\)
- step 1) given \(z\), evaluate \(\tilde{p(z)}\)
- step 2) sample \(u\) from \(\text{Unif}(0,\tilde{p(z)})\)
- step 3) fix \(u\) and sample \(z\) , distribution defined by \(\{z: \tilde{p}(z)>u\}\)
11-5. The Hybrid MC algorithm
limitation of Metropolis : “random walk”
introduce a sophisticated class of transition, based on physical system
Applicable to..
- distributions over continuous variables
- for which we can readily evaluate the gradient of log probability w.r.t state variable
11-5-1. Dynamic Systems
dynamics : \(\tau\)
state variable : \(z\)
momentum variable : \(r\)
\(r_{i}=\frac{\mathrm{d} z_{i}}{\mathrm{~d} \tau}\).
Hamiltonian function \(H\) : \(H(\mathbf{z}, \mathbf{r})=E(\mathbf{z})+K(\mathbf{r})\)
- \(p(\mathbf{z})=\frac{1}{Z_{p}} \exp (-E(\mathbf{z}))\).
- \(E(\mathbf{z})\) : potential energy
- \(K(\mathbf{r})=\frac{1}{2}\|\mathbf{r}\|^{2}=\frac{1}{2} \sum_{i} r_{i}^{2}\).
- kinetic energy
Hamiltonian Equation
- \(\begin{aligned} \frac{\mathrm{d} z_{i}}{\mathrm{~d} \tau} &=\frac{\partial H}{\partial r_{i}} \\ \frac{\mathrm{d} r_{i}}{\mathrm{~d} \tau} &=-\frac{\partial H}{\partial z_{i}} \end{aligned}\).
Properties
-
1) during the evolution of this dynamical system \(H\) is constant
\(\begin{aligned} \frac{\mathrm{d} H}{\mathrm{~d} \tau} &=\sum_{i}\left\{\frac{\partial H}{\partial z_{i}} \frac{\mathrm{d} z_{i}}{\mathrm{~d} \tau}+\frac{\partial H}{\partial r_{i}} \frac{\mathrm{d} r_{i}}{\mathrm{~d} \tau}\right\} \\ &=\sum_{i}\left\{\frac{\partial H}{\partial z_{i}} \frac{\partial H}{\partial r_{i}}-\frac{\partial H}{\partial r_{i}} \frac{\partial H}{\partial z_{i}}\right\}=0 \end{aligned}\).
-
2) Liouville’s Theorem : preserve volume in phase space
\[\mathbf{V}=\left(\frac{\mathrm{d} \mathbf{z}}{\mathrm{d} \tau}, \frac{\mathrm{d} \mathbf{r}}{\mathrm{d} \tau}\right)\]\(\begin{aligned} \operatorname{div} \mathbf{V} &=\sum_{i}\left\{\frac{\partial}{\partial z_{i}} \frac{\mathrm{d} z_{i}}{\mathrm{~d} \tau}+\frac{\partial}{\partial r_{i}} \frac{\mathrm{d} r_{i}}{\mathrm{~d} \tau}\right\} \\ &=\sum_{i}\left\{-\frac{\partial}{\partial z_{i}} \frac{\partial H}{\partial r_{i}}+\frac{\partial}{\partial r_{i}} \frac{\partial H}{\partial z_{i}}\right\}=0 \end{aligned}\).
Joint pdf
- total energy = Hamiiltonian
- \(p(\mathbf{z}, \mathbf{r})=\frac{1}{Z_{H}} \exp (-H(\mathbf{z}, \mathbf{r}))\).
Due to 2 properties : Hamiltonian dynamics will leave \(p(z,r)\) invariant
- volume of this region will remain unchanged
- thus, \(H\), and probability density will remain unchanged
Althoough \(H\) is invariant, \(z\) and \(r\) will vary
In order to arrive at an ergodic sampling…
\(\rightarrow\) introduce additional moves
\(\rightarrow\) change the value of \(H\) while leaving \(p(z,r)\) unchanged!
By “replacing \(z\) with one drawn from its distribution conditioned on \(z\) “
( \(z\) and \(r\) are independent in \(p(z,r)\), so conditional \(p(r\mid z)\) is a Gaussian )
Leapfrog discretization
successive updates to position (\(z\)) and momentum \((r)\)
\[\begin{aligned} \widehat{r}_{i}(\tau+\epsilon / 2) &=\widehat{r}_{i}(\tau)-\frac{\epsilon}{2} \frac{\partial E}{\partial z_{i}}(\widehat{\mathbf{z}}(\tau)) \\ \widehat{z}_{i}(\tau+\epsilon) &=\widehat{z}_{i}(\tau)+\epsilon \widehat{r}_{i}(\tau+\epsilon / 2) \\ \widehat{r}_{i}(\tau+\epsilon) &=\widehat{r}_{i}(\tau+\epsilon / 2)-\frac{\epsilon}{2} \frac{\partial E}{\partial z_{i}}(\widehat{\mathbf{z}}(\tau+\epsilon)) \end{aligned}.\]- time interval : \(\tau\) \(\rightarrow\) need \(\tau/\epsilon\) steps
Summary
Hamiltonian dynamical approach invloves alternating between
- series of leapfrog updates
- re-sampling of the momentum variables
Unlike Metropolis, able to make use of “gradient of log prob”
11-5-2. Hybrid MC
Hybrid MC = Hamiltonian dynamics + Metropolis
After each application of leapfrog…
-
resulting candidate state is ACCEPTED/REJECTED according to the Metropolis criterion
( based on the value of Hamiltonian \(H\) )
\(\min \left(1, \exp \left\{H(\mathbf{z}, \mathbf{r})-H\left(\mathbf{z}^{\star}, \mathbf{r}^{\star}\right)\right\}\right)\).
-
perfect : \(H\) unchanged \(\rightarrow\) 100% accept
-
numerical errors : \(H\) may sometimes decrease