
Temporal Fusion Transformers for Interpretable Multi-horizon Time Series Forecasting (2020)
Contents
- Abstract
- Introduction
- DeTSEC : Deep Time Series Embedding Clustering
0. Abstract
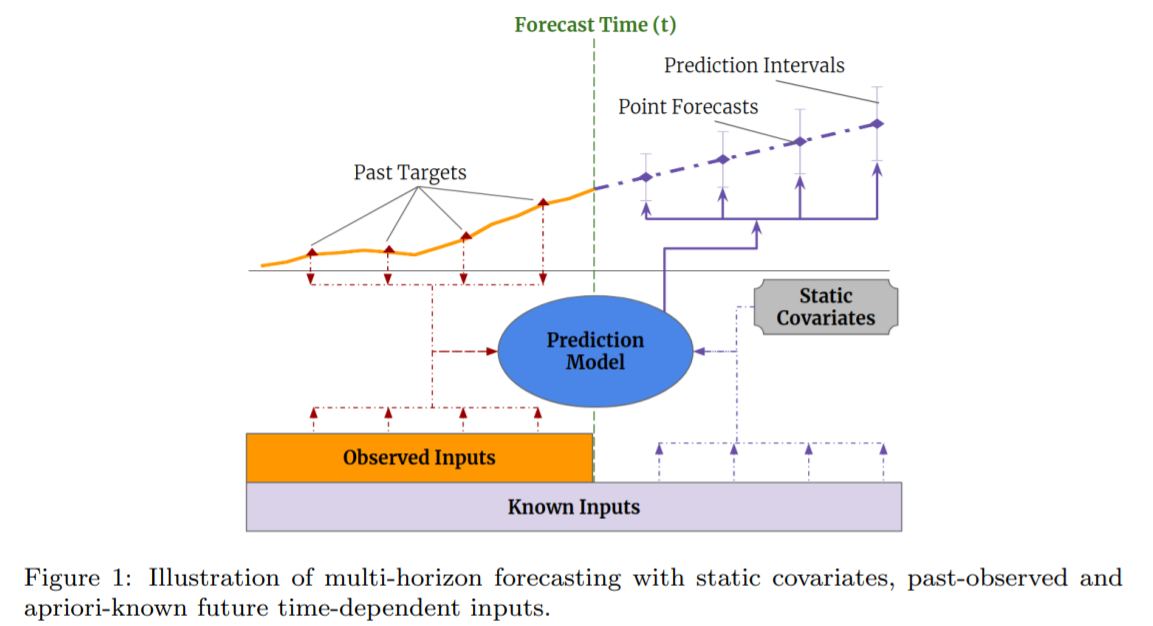
Multi-horizon forecasting
- often contains complex mix of inputs
Complex mix of Inputs
-
1) static covariates ( = time-invariant )
-
2) known future inputs
-
3) other exogenous time series
( = only observed in the past )
Most of DL = “black box”
Propose TFT ( = Temporal Fusion Transformer )
- novel attention-based architecture
- combines..
- 1) high-performance multi-horizon forecasting
- 2) with interpretable insights into temporal dynamics
- TFT uses..
- 1) recurrent layers for local processing
- 2) interpretable self-attention layers for long-term dependencies
1. Introduction
Multi-horizon forecasting
- prediction of multiple future time steps
have access to a variety of data
while, many architectures have focused on variants of RNN…. recent improvments have used ATTENTION-based methods ( ex. Transformer )
\(\rightarrow\) but fail to consider different types of inputs & assume that all exogenous inputs are known in the future
propose TFT
- an attention-based DNN architecture for multi-horizon forecasting
- achieves high performance while enabling new forms of interpretability
2. Related Work
2-1. DNNs for Multi-horizon Forecasting
categorized into..
- 1) [iterated approaches] using autoregressive models
- 2) [direct methods] based on seq2seq
[1] Iterated Approaches
- one-step ahead prediction models
- recursively feeding
- rely on assumption that all variables excluding target are known at forecast tiime
- [1] vs TFT
- TFT : explicitly accounts for diversity of inputs
[2] Direct methods
- expliclity generate forecasts for multiple PRE-defined horizons at each time step
- usually rely on seq2seq
- [2] vs TFT
- by interpreting attention patterns, TFT can provide insightful EXPLANATIONS about temporal dynamics
2-2. Time Series Interpretability with Attention
- attention : identify salient portions of input
- BUT… do not consider the IMPORTANCE of STATIC COVARIATES
TFT solves this by using SEPARATE encoder-decoder attention for static features
2-3. Instance-wise Variable Importances with DNNs
Instance-wise Variable Importances with DNNs :
- done by post-hoc explanations
- ex) LIME, SHAP, RL-LIM
TFT is able to analyze global temporal relationships and allows users to interpret global behaviors of the model on the whole dataset – specifically in the identification of any persistent patterns (e.g. seasonality or lag effects) and regimes present.
3. Multi-horizon Forecasting
Notation
- 1) static covariates : \(s_{i} \in \mathbb{R}^{m_{s}}\)
- 2) inputs : \(\chi_{i, t} \in \mathbb{R}^{m_{\chi}}\)
- 3) scalar targets : \(y_{i, t} \in \mathbb{R}\) at each time-step \(t \in\left[0, T_{i}\right]\). T
Time-dependent input features are subdivided into 2 categories
\(\chi_{i, t}=\left[\boldsymbol{z}_{i, t}^{T}, \boldsymbol{x}_{i, t}^{T}\right]^{T}\).
- \(\boldsymbol{z}_{i, t} \in \mathbb{R}^{\left(m_{z}\right)}\) : observed input
- only be measured at each step & unknown beforehand
- \(\boldsymbol{x}_{i, t} \in \mathbb{R}^{m_{x}}\) : known inputs
- can be predetermined
Prediction intervals
- adopt quantile regression to our multi-horizon forecasting setting
- (e.g. outputting the \(10^{t h}\), \(50^{t h}\) and \(90^{t h}\) percentiles at each time step)
Each quantile forecast takes the form :
\(\hat{y}_{i}(q, t, \tau)=f_{q}\left(\tau, y_{i, t-k: t}, \boldsymbol{z}_{i, t-k: t}, \boldsymbol{x}_{i, t-k: t+\tau}, s_{i}\right)\).
- \(q^{t h}\)sample quantile
- \(\tau\) step ahead forecast at time \(t\)
- \(f_{q}(.)\): prediction model
Simulatenously output forecasts for \(\tau_{max}\) time steps!
- i.e. \(\tau \in\) \(\left\{1, \ldots, \tau_{\max }\right\}\).
- incorporate all past information within a finite look-back window \(k\)
4. Model Architecture
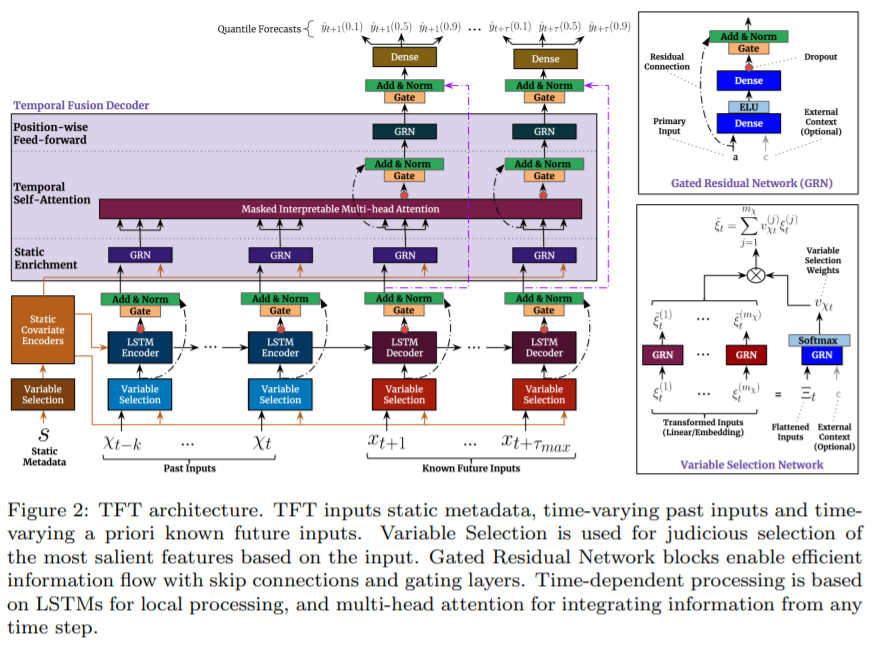
design TFT to use canonical components
-
efficiently build feature representations for each input type
( static / known / observed )
4 major constituents of TFTS :
- 1) Gating mechanism
- 2) Variable selection networks
- 3) Static covariate encoders
- 4) Temporal processing
- 5) Prediction Intervals
4-1. Gating Mechanism
- relationship between exogenous inputs and targets
- propose GRN ( Gated Residual Network ) as building block of TFT
- input 1) primary input \(\mathbf{a}\)
- input 2) optional context vector \(c\)
\(\begin{aligned} \operatorname{GRN}_{\omega}(\boldsymbol{a}, \boldsymbol{c}) &=\text { LayerNorm }\left(\boldsymbol{a}+\operatorname{GLU}_{\omega}\left(\boldsymbol{\eta}_{1}\right)\right) \\ \boldsymbol{\eta}_{1} &=\boldsymbol{W}_{1, \omega} \boldsymbol{\eta}_{2}+\boldsymbol{b}_{1, \omega} \\ \boldsymbol{\eta}_{2} &=\operatorname{ELU}\left(\boldsymbol{W}_{2, \omega} \boldsymbol{a}+\boldsymbol{W}_{3, \omega} \boldsymbol{c}+\boldsymbol{b}_{2, \omega}\right) \end{aligned}\).
- use component gating layers, based on GLU (Gated Linear Units) to provide flexibility
- \(\mathrm{GLU}_{\omega}(\boldsymbol{\gamma})=\sigma\left(\boldsymbol{W}_{4, \omega} \boldsymbol{\gamma}+\boldsymbol{b}_{4, \omega}\right) \odot\left(\boldsymbol{W}_{5, \omega} \boldsymbol{\gamma}+\boldsymbol{b}_{5, \omega}\right)\).
- allows TFT to control the extent to which the GRN contributs to the original input \(\mathbf{a}\)
4-2. Variable Selection Networks
-
multiple variables may be available
- instance wise variable selection
- applied both to “static covariates” & “time-dependent covariates”
- learning capacity only on the most salient ones
(1) categorical variables : entity embeddings
(2) continuous variables : linear transformations
all static/past/future inputs make use of separate variable selection networks
\(\boldsymbol{\Xi}_{t}=\left[\boldsymbol{\xi}_{t}^{(1)^{T}}, \ldots, \boldsymbol{\xi}_{t}^{\left(m_{\chi}\right)^{T}}\right]^{T}\).
- \(\boldsymbol{\xi}_{t}^{(j)} \in \mathbb{R}^{d_{\text {model }}}\) : transformed input of the \(j\)-th variable at time \(t\).
Variable selection weights :
\(\boldsymbol{v}_{\chi_{t}}=\operatorname{Softmax}\left(\operatorname{GRN}_{v_{\chi}}\left(\boldsymbol{\Xi}_{t}, \boldsymbol{c}_{s}\right)\right)\).
( where \(\boldsymbol{v}_{\chi_{t}} \in \mathbb{R}^{m_{\chi}}\) is a vector of variable selection weights, )
- external context vector \(\boldsymbol{c}_{s}\)
additional layer of non-linear processing :
- \(\tilde{\boldsymbol{\xi}}_{t}^{(j)}=\operatorname{GRN}_{\tilde{\xi}(j)}\left(\boldsymbol{\xi}_{t}^{(j)}\right)\).
processed features : weighted average
- \(\tilde{\boldsymbol{\xi}}_{t}=\sum_{j=1}^{m_{\chi}} v_{\chi_{t}}^{(j)} \tilde{\boldsymbol{\xi}}_{t}^{(j)}\).
4-3. Static Covariate Encoders
integrate additional information! using separate GRN encoders
-
4 different context vectors : \(\mathbf{c}_s,\mathbf{c}_e,\mathbf{c}_c,\mathbf{c}_h\)
( wired into various locations in the temporal fusion decoder )
-
\(\mathbf{c}_s\) : context for temporal variable selection
-
\(\mathbf{c}_c,\mathbf{c}_h\) : context for local processing of temporal features
-
\(\mathbf{c}_e\) : context for enriching of temporal features with static information
4-4. Interpretable Multi-head Attention
( 기존 )
\(\operatorname{MultiHead}(\boldsymbol{Q}, \boldsymbol{K}, \boldsymbol{V})=\left[\boldsymbol{H}_{1}, \ldots, \boldsymbol{H}_{m_{H}}\right] \boldsymbol{W}_{H}\).
- \(\boldsymbol{H}_{h}=\operatorname{Attention}\left(\boldsymbol{Q} \boldsymbol{W}_{Q}^{(h)}, \boldsymbol{K} \boldsymbol{W}_{K}^{(h)}, \boldsymbol{V} \boldsymbol{W}_{V}^{(h)}\right)\).
( 제안 )
\(\text { InterpretableMultiHead }(\boldsymbol{Q}, \boldsymbol{K}, \boldsymbol{V})=\tilde{\boldsymbol{H}} \boldsymbol{W}_{H}\).
- \(\begin{aligned} \tilde{\boldsymbol{H}}=& \tilde{A}(\boldsymbol{Q}, \boldsymbol{K}) \boldsymbol{V} \boldsymbol{W}_{V} \\ =&\left\{1 / H \sum_{h=1}^{m_{H}} A\left(\boldsymbol{Q} \boldsymbol{W}_{Q}^{(h)}, \boldsymbol{K} \boldsymbol{W}_{K}^{(h)}\right)\right\} \boldsymbol{V} \boldsymbol{W}_{V} \\ =& 1 / H \sum_{h=1}^{m_{H}} \operatorname{Attention}\left(\boldsymbol{Q} \boldsymbol{W}_{Q}^{(h)}, \boldsymbol{K} \boldsymbol{W}_{K}^{(h)}, \boldsymbol{V} \boldsymbol{W}_{V}\right) \end{aligned}\).
- where \(\boldsymbol{W}_{V} \in \mathbb{R}^{d_{\text {model }} \times d_{V}}\) are value weights shared across all heads
4-5. Temporal Fusion Decoder
(1) Locality Enhancement with seq2seq layer
- \(\tilde{\boldsymbol{\phi}}(t, n)=\text { LayerNorm }\left(\tilde{\boldsymbol{\xi}}_{t+n}+\operatorname{GLU}_{\tilde{\phi}}(\boldsymbol{\phi}(t, n))\right)\).
(2) static enrichment layer
- \(\boldsymbol{\theta}(t, n)=\operatorname{GRN}_{\theta}\left(\tilde{\boldsymbol{\phi}}(t, n), \boldsymbol{c}_{e}\right)\).
- \(c_e\) is a context vector from a static covariate encoder
(3) Temporal Self-attention layer
-
all static-enriched temporal features are first grouped into single matrix
\(\boldsymbol{\Theta}(t)=[\boldsymbol{\theta}(t,-k), \ldots,\).\(\boldsymbol{\theta}(t, \tau)]^{T}\)
-
Interpretable Multi-head attention
\(\boldsymbol{B}(t)=\operatorname{InterpretableMultiHead}(\boldsymbol{\Theta}(t), \boldsymbol{\Theta}(t), \boldsymbol{\Theta}(t))\).
-
Decoder masking ( only attend to features preceding it )
-
after self-attention layer…
additional gating layer : \(\boldsymbol{\delta}(t, n)=\operatorname{LayerNorm}\left(\boldsymbol{\theta}(t, n)+\operatorname{GLU}_{\delta}(\boldsymbol{\beta}(t, n))\right)\).
(4) Position-wise FFNN
-
\(\boldsymbol{\psi}(t, n)=\operatorname{GRN}_{\psi}(\boldsymbol{\delta}(t, n))\).
-
\(\tilde{\boldsymbol{\psi}}(t, n)=\text { LayerNorm }\left(\tilde{\boldsymbol{\phi}}(t, n)+\operatorname{GLU}_{\tilde{\psi}}(\boldsymbol{\psi}(t, n))\right)\)>
4-6. Quantile Outputs
-
simultaneous prediction of various percentiles (e.g. \(10^{\text {th }}, 50^{\text {th }}\) and \(\left.90^{t h}\right)\)
-
generated using linear transformation of the output from the temporal fusion decoder:
\(\hat{y}(q, t, \tau)=\boldsymbol{W}_{q} \tilde{\boldsymbol{\psi}}(t, \tau)+b_{q}\).
5. Loss Function
Quantile loss ( = summed across all quantile outputs )
\(\mathcal{L}(\Omega, \boldsymbol{W})=\sum_{y_{t} \in \Omega} \sum_{q \in \mathcal{Q}} \sum_{\tau=1}^{\tau_{\max }} \frac{Q L\left(y_{t}, \hat{y}(q, t-\tau, \tau), q\right)}{M \tau_{\max }}\).
- \(Q L(y, \hat{y}, q)=q(y-\hat{y})_{+}+(1-q)(\hat{y}-y)_{+}\).
- \(\Omega\) : the domain of training data containing \(M\) samples
- \(\boldsymbol{W}\) : weights of TFT
- \(\mathcal{Q}=\{0.1,0.5,0.9\}\).
for out-of-sample testing, evaluate the normalized quantile losses
\(q \text {-Risk }=\frac{2 \sum_{y_{t} \in \tilde{\Omega}} \sum_{\tau=1}^{\tau_{\max }} Q L\left(y_{t}, \hat{y}(q, t-\tau, \tau), q\right)}{\sum_{y_{t} \in \bar{\Omega}} \sum_{\tau=1}^{\tau_{\max }}\mid y_{t}\mid }\).