PatchMixer: A Patch-Mixing Architecture for Long-term Time Series Forecasting (ICLR, 2024 (?))
Contents
-
Abstract
-
Introduction
-
Related Work
-
Proposed Method
-
Experiments
Abstract
Transformer vs. CNN
-
Transformer: permutation-invariant \(\rightarrow\) PatchTST
-
CNN: permutation-variant \(\rightarrow\) PatchMixer
PatchMixer
-
only uses depthwise separable CNN
-
allows to extract
- local featurers
- global correlations
using a single-scale architecture
-
dual forecasting heads
- encompass both “linear & nonlinear” components
1. Introduction
Effectiveness of Transformers in LTSF…??
PatchTST = (1) Patching + (2) TST (=Transformer)
- recent works also adopt this “patching” (Zhang & Yan, 2023; Lin et al., 2023)
Contribution
- (1) propose PatchMixer, based on CNN
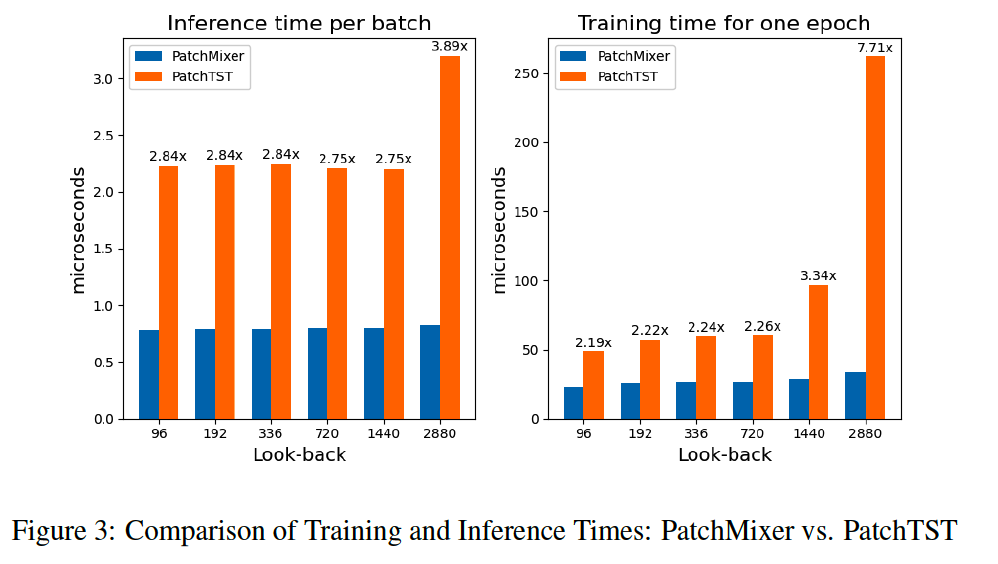
- (2) Efficient
- 3 times faster for inference
- 2 times faster during training
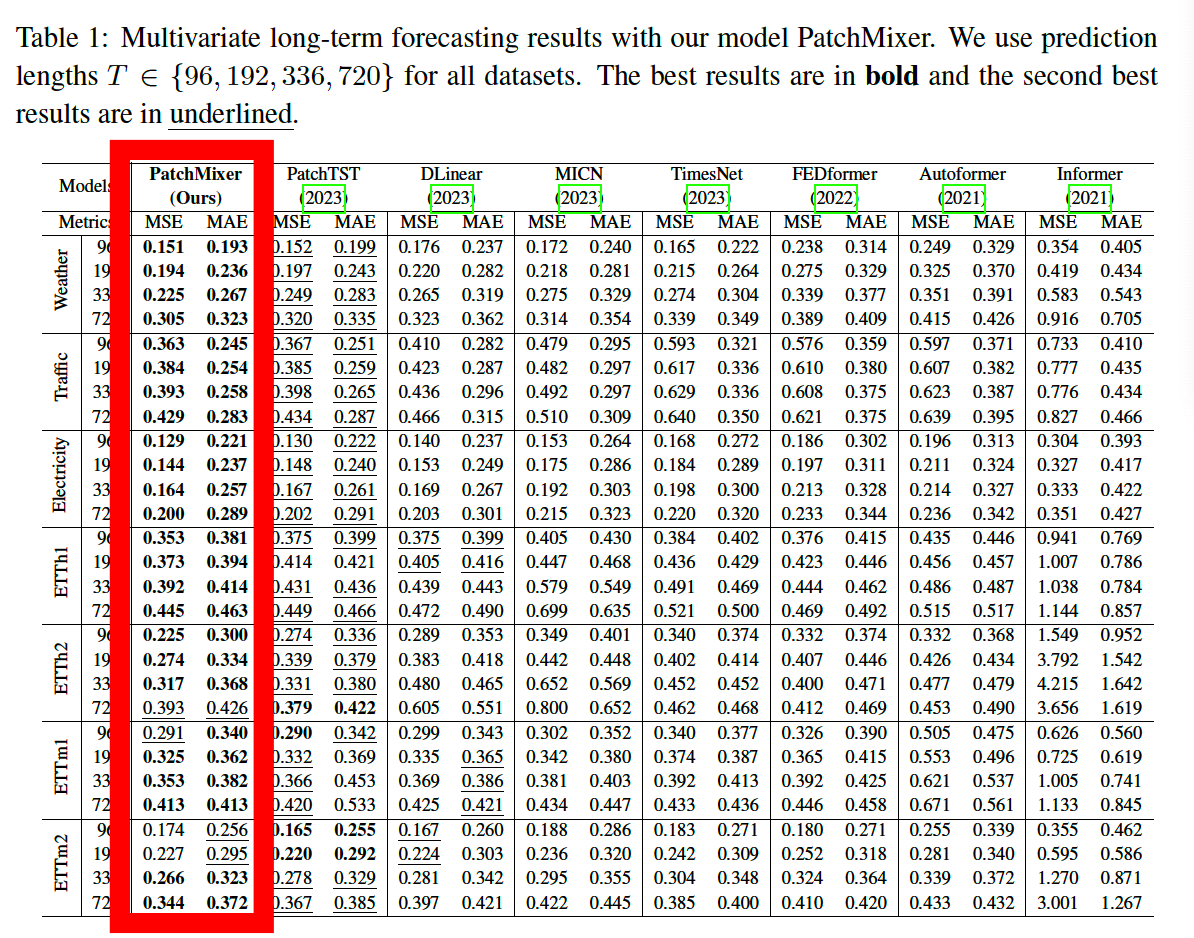
- (3) SOTA
2. Related Work
(1) CNN
TCN: dilated causal CNN
SCINet: extract multi-resolutions via binary tree structure
MICN: multi-scale hybrid decomposition & isometric convolution from both local & global perspective
TimesNet: segment sequences into patches
S4: use structured state space model
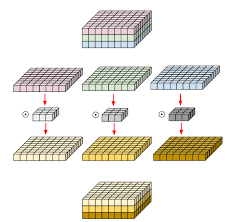
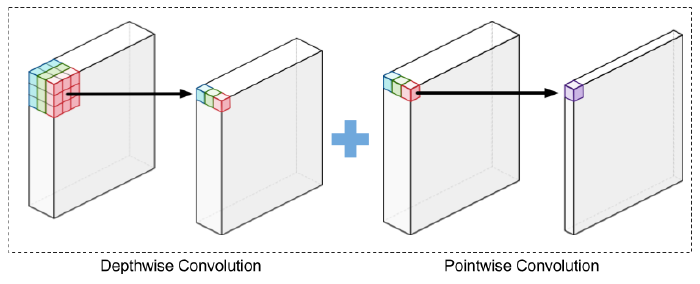
(2) Depthwise Separable Convolution
(3) Channel Independence
CI ise more effective than channel mixing methods for forecasting tasks
3. Proposed Method
(1) Problem Formulation
Look-back window \(L:\left(\boldsymbol{x}_1, \ldots, \boldsymbol{x}_L\right)\),
- \(\boldsymbol{x}_t\) : vector of \(M\) variables
Prediction sequence : \(\left(\boldsymbol{x}_{L+1}, \ldots, \boldsymbol{x}_{L+T}\right)\).
Channel Indepdendence
- Input: multivariate TS \(\left(\boldsymbol{x}_1, \ldots, \boldsymbol{x}_L\right)\) is split to \(M\) univariate TS \(\boldsymbol{x}^{(i)} \in \mathbb{R}^{1 \times L}\).
- \(i\)-th univariate TS : \(x_{1: L}^{(i)}=\) \(\left(\boldsymbol{x}_1^{(i)}, \ldots, \boldsymbol{x}_L^{(i)}\right)\) where \(i=1, \ldots, M\).
- independently fed into the mode
- Output: \(\hat{\boldsymbol{x}}^{(i)}=\left(\hat{\boldsymbol{x}}_{L+1}^{(i)}, \ldots, \hat{\boldsymbol{x}}_{L+T}^{(i)}\right) \in \mathbb{R}^{1 \times T}\)
(2) Model Structure
(1) (single-scale) Depthwise separable convolutional block
- to capture both the global receptive field & local positional features
(2) Dual forecasting heads
-
a) one linear flatten head and
-
b) one MLP flatten head
\(\rightarrow\) jointly incorporate nonlinear and linear features to model future sequences independently
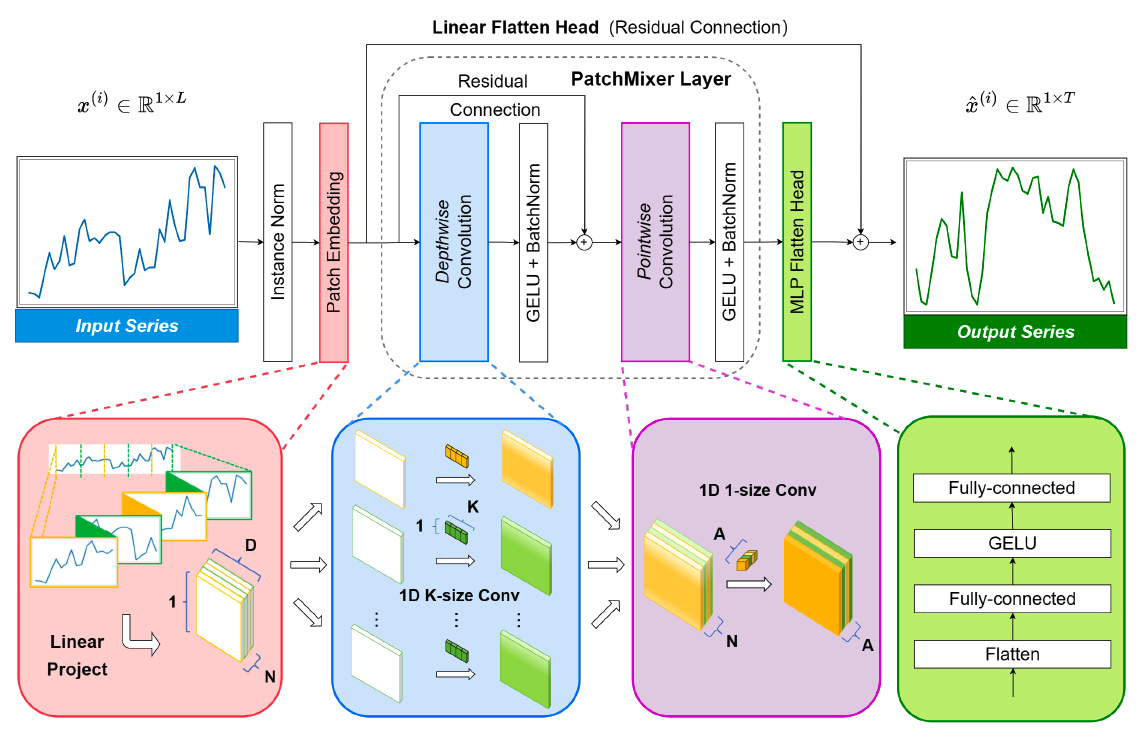
(3) Patch Embedding
( Inspired by PatchTST )
- \(\hat{\mathbf{X}}_{2 \mathrm{D}}=\operatorname{Unfold}\left(\text { ReplicationPad }\left(\mathbf{X}_{1 \mathrm{D}}\right), \text { size }=P, \text { step }=S\right)\).
- P = 16 and S = 8 ( half-overlap between each patch )
Strong predictive performance observed in TS forecasting
- Transformer (X)
- Patching (O)
\(\rightarrow\) Design PatchMixer based on CNN architectures
Embedding w/o Positional Encoding
Candidate
- a) Traditional Transformer based models
-
b) PatchTST (Transformer based)
- c) PatchMixer (CNN)
a) \(\operatorname{Embedding}(\mathbf{X})=\operatorname{sum}(T F E+P E+V E): x^L \rightarrow x^D\).
b) \(\operatorname{Embedding}(\mathbf{X})=\operatorname{sum}(P E+V E): x^{N \times S} \rightarrow x^{N \times D}\)
c) \(\operatorname{Embedding}(\mathbf{X})=V E: x^{N \times S} \rightarrow x^{N \times D}\).
TFE: Temporal Feature Encoding
- ex) MinuteOfHour, HourOfDay, …
PE: Positional Embedding
VE: Value Embedding
(4) PatchMixer Layer
Previous CNNs
- often modeled global relationships within TS across multiple scales or numerous branches
PatchMixer
-
only employs single scale depthwise separable convolution
-
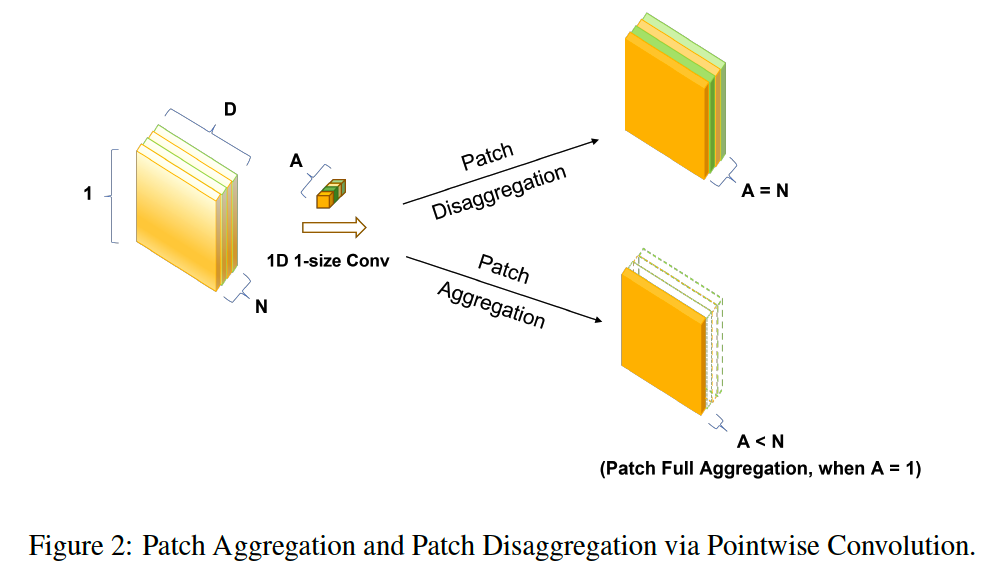
patch-mixing: separates
- per-location (intra-patch) operations with depthwise convolution
- cross-location (inter-patch) operations with pointwise convolution
\(\rightarrow\) allows our model to capture both the global receptive field and local positional features
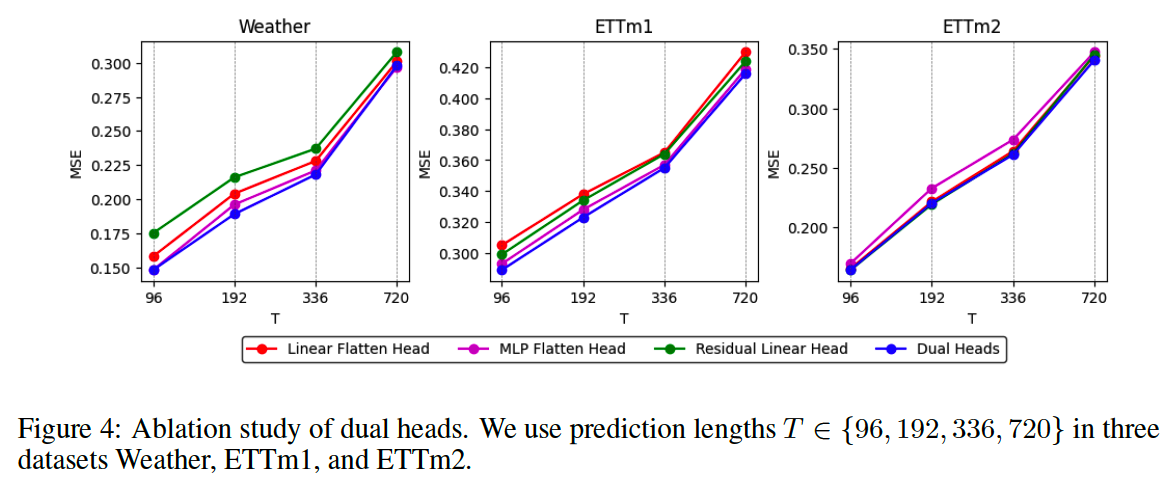
(5) Dual Forecasting Heads
Previous LTSF methods
- a) decomposing inputs (i.e. DLinear)
- b) multi-head attention mechanism in Transformers: decomposing & aggregating multiple outputs.
\(\rightarrow\) prropose novel dual-head mechanism based on the decomposition-aggregation concept
Dual-head mechanism
- Capture linear features and the other focuses on capturing nonlinear variations
- extracts the …
- (1) overall trend of temporal changes
- via a linear residual connection spanning the convolution
- (2) nonlinear part
- Via an MLP forecasting head after a fully convolutional layer
- (1) overall trend of temporal changes
- prediction results = sum of the two
(6) Normalization & Loss Function
Instance Norm
Loss function
- \(\begin{gathered} \mathcal{L}_{\mathcal{M S E}}=\frac{1}{M} \sum_{i=1}^M \mid \mid \hat{\boldsymbol{x}}_{L+1: L+T}^{(i)}-\boldsymbol{x}_{L+1: L+T}^{(i)} \mid \mid _2^2, \\ \mathcal{L}_{\mathcal{M A E}}=\frac{1}{M} \sum_{i=1}^M \mid \mid \hat{\boldsymbol{x}}_{L+1: L+T}^{(i)}-\boldsymbol{x}_{L+1: L+T}^{(i)} \mid \mid . \end{gathered}\).
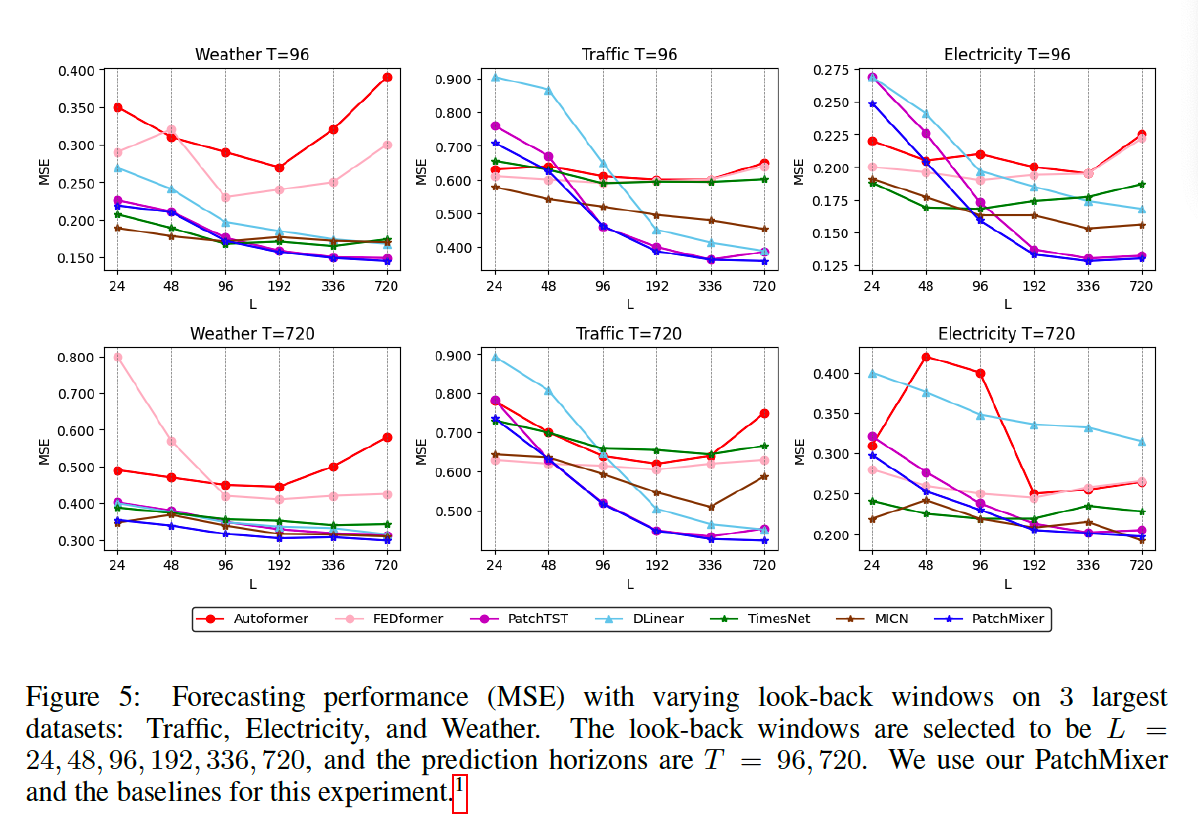
4. Experiments
(1) LTSF task
(2) Ablation Study
a) Efficiency analysis
b) Conv vs. Attention
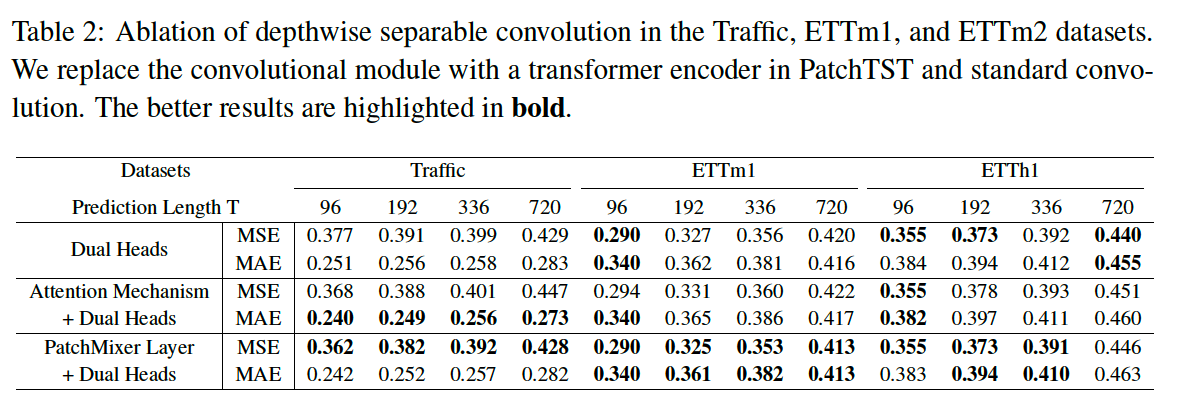
c) Dual Forecasting head
d) Varying Lookback Window