
DYffusion: A Dynamics-informed Diffusion Model for Spatio-temporal Forecasting
Contents
- Abstract
- Introduction
- Background
- Problem Setup
- Diffusion processes
- DYffusion: Dynamics-Informed Diffusion Model
Abstract
Dyffusion
-
Efficiently training diffusion models for probabilistic spatio-temporal forecasting
-
Train a stochastic, time-conditioned interpolator & forecaster network
-
Facilitates multi-step & long-range forecasting
-
Imposes strong inductive bias & improves computational efficiency
( compared to traditional Gaussian noise-based diffusion models )
1. Introduction
Dynamics forecasting = predicting the future behavior of a dynamic system
Generative modeling = promising avenue for probabilistic dynamics forecasting
Challenges in generative modeling
- (1) Computational cost: sequential sampling
- (2) Few methodsd apply diffusion models beyond static images (i.e. Video)
Dyffusion
- Train a dyanmics-informed diffusion model for multi-step probabilistic forecasting
- Non-Gaussian diffusion process
- relies on temporal interpolation
- implemented via time-conditioned NN
- Inductive bias by coupling …
- (1) the diffusion process steps
- (2) the time steps in the dynamical system
\(\rightarrow\) Reduces the computational complexitiy, data efficiency, # of diffusion steps
Contributions
- Investiage probabilistic spatio-temporal forecasting from the perspective of diffusion
- Propose DYffusion
- flexible framework for multi-step forecasting & long-range horizons
- leverages temporal inductive bias to accelerate training & lower memory needs
2. Background
(1) Problem Setup
Probabilistic spatio-temporal forecasting
Notation
- Dataset of \(\left\{\mathrm{x}_t\right\}_{t=1}^T\) snapshots with \(\mathrm{x}_t \in \mathcal{X}\).
- Task of probabilistic forecasting
- learn a conditional distribution \(P\left(\mathrm{x}_{t+1: t+h} \mid \mathrm{x}_{t-l+1: t}\right)\)
- Task of forecasting from a single initial condition
- learn \(P\left(\mathrm{x}_{t+1: t+h} \mid \mathrm{x}_t\right)\).
(2) Diffusion processes
Diffusion step states, \(\mathbf{s}^{(n)}\)
- \(n\) : diffusion step (O), time step (X)
Degradation operator \(D\)
- Add noises
- Input: data point \(\mathbf{s}^{(0)}\)
- Output: \(\mathbf{s}^{(n)}=D\left(\mathbf{s}^{(0)}, n\right)\)
- for varying degrees of degradation proportional to \(n \in\{1, \ldots, N\}\)
- ex) \(D\) adds Gaussian noise
- with increasing levels of variance so that \(\mathbf{s}^{(N)} \sim \mathcal{N}(\mathbf{0}, \mathbf{I})\).
Denoising network \(R_\theta\)
- Trained to restore \(\mathbf{s}^{(0)}\), i.e. such that \(R_\theta\left(\mathbf{s}^{(n)}, n\right) \approx \mathbf{s}^{(0)}\).
Diffusion model can be conditioned on the input dynamics by considering \(R_\theta\left(\mathbf{s}^{(n)}, \mathbf{x}_t, n\right)\).
Dynamics forecasting: the diffusion model can be trained to minimize the objective
\(\min _\theta \mathbb{E}_{n \sim \mathcal{U} [ 1, N ], \mathbf{x}_t, \mathbf{s}^{(0)} \sim \mathcal{X}}\left[ \mid \mid R_\theta\left(D\left(\mathbf{s}^{(0)}, n\right), \mathbf{x}_t, n\right)-\mathbf{s}^{(0)} \mid \mid ^2\right]\)…. Eq (1)
- \(\mathbf{s}^{(0)}=\mathbf{x}_{t+1: t+h}\).
- Can be viewed as a generalized version of the standard diffusion models
- (In practice, \(R_\theta\) may be trained to predict the Gaussian noise)
3. DYffusion: Dynamics-Informed Diffusion Model
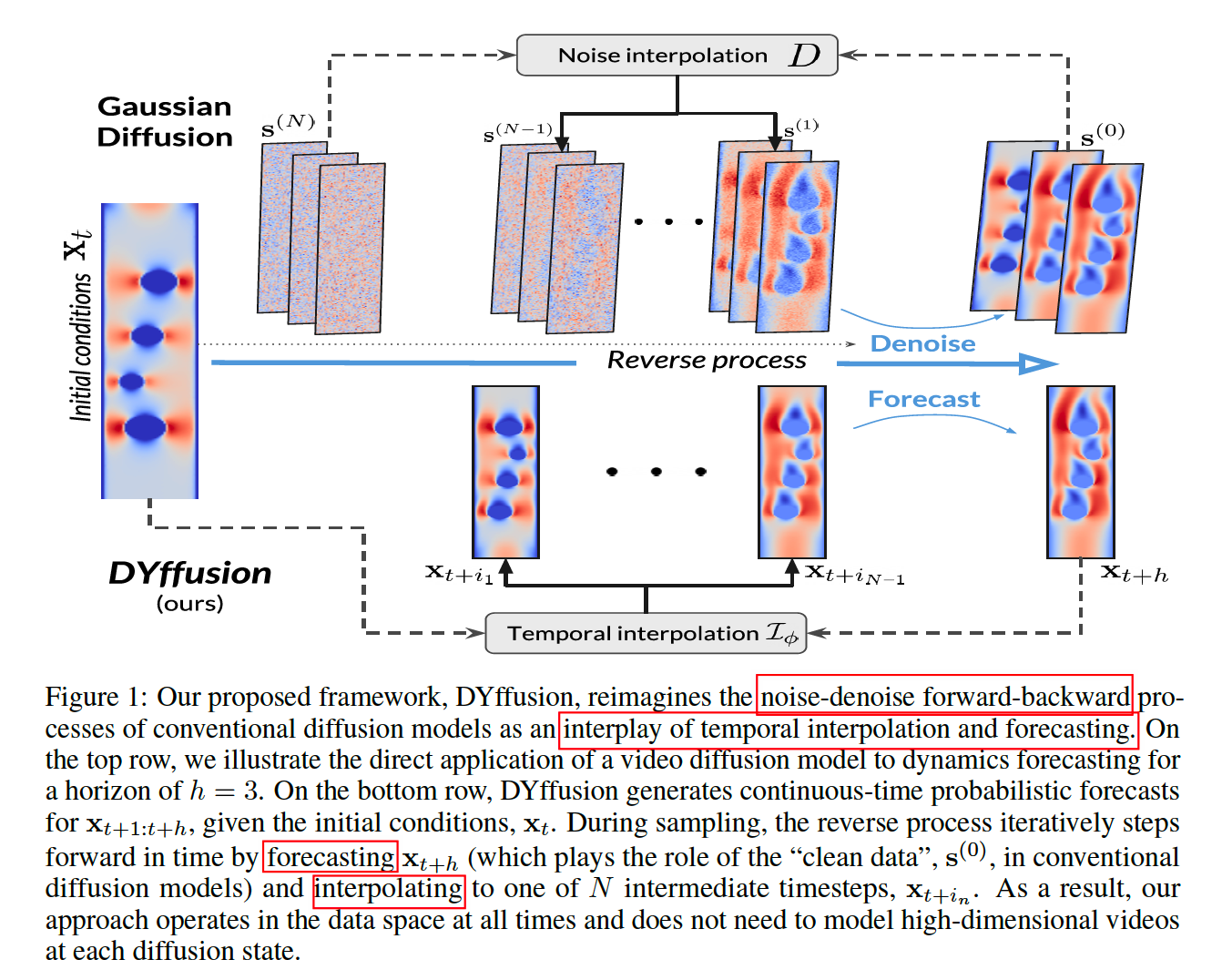
Replace the …
- Degradation operator \(D\) \(\rightarrow\) Stochastic interpolator network \(\mathcal{I}_\phi\)
- Restoration network \(R_\theta\), \(\rightarrow\) Deterministic forecaster network \(F_\theta\).
HIGH level: time step (temporal dynamics in data)
LOW level: diffusion step
- intermediate steps in the diffusion process can be reused as forecasts for actual timesteps in multi-step forecasting
Advantage
- Diffusion) initialized with the initial conditions of the dynamics
- Standard) designed for unconditional generation & reverse from WN … more diffusion steps!
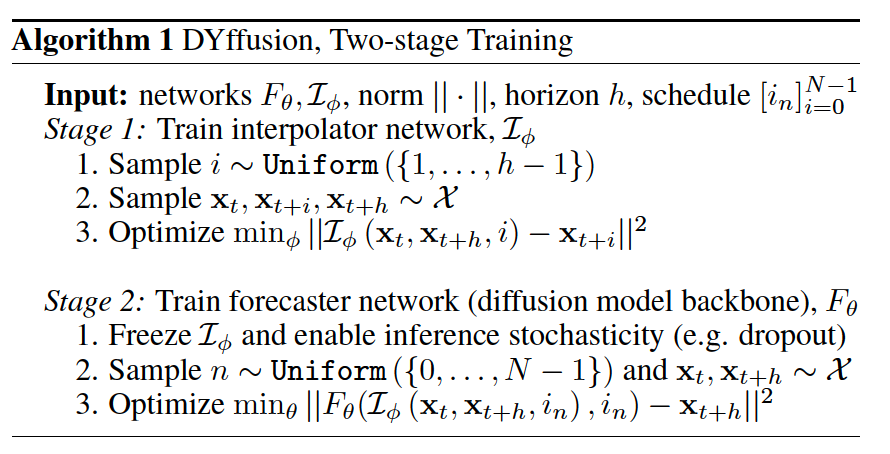
a) “Temporal Interpolation” = FORWARD process
To impose temporal bias, train a time-conditioned network \(\mathcal{I}_\phi\) to interpolate between snapshots of data.
Goal
- given a horizon \(h\)
- train \(\mathcal{I}_\phi\) so that \(\mathcal{I}_\phi\left(\mathbf{x}_t, \mathbf{x}_{t+h}, i\right) \approx \mathbf{x}_{t+i}\) for \(i \in\{1, \ldots, h-1\}\)
Loss function
- \(\min _\phi \mathbb{E}_{i \sim \mathcal{U} [ 1, h-1 ], \mathbf{x}_{t, t+i, t+h} \sim \mathcal{X}}\left[ \mid \mid \mathcal{I}_\phi\left(\mathbf{x}_t, \mathbf{x}_{t+h}, i\right)-\mathbf{x}_{t+i} \mid \mid ^2\right]\).
Interpolation = Easier task than forecasting
\(\rightarrow\) Use the interpolator \(\mathcal{I}_\phi\) during inference to interpolate beyond the temporal resolution of the data
Stochastic interpolator
- To generate probabilistic forecasts
- Produce stochastic outputs within the diffusion model and during inference time
- by Monte Carlo dropout at inference time.
b) “Forecasting” = REVERSE process
Interpolator network, \(\mathcal{I}_\phi\), is frozen with inference stochasticity enabled
Loss function
- \(\min _\theta \mathbb{E}_{n \sim \mathcal{U} [] 0, N-1 ], \mathbf{x}_{t, t+h} \sim \mathcal{X}}\left[ \mid \mid F_\theta\left(\mathcal{I}_\phi\left(\mathbf{x}_t, \mathbf{x}_{t+h}, i_n \mid \xi\right), i_n\right)-\mathbf{x}_{t+h} \mid \mid ^2\right]\).
To include the setting where \(F_\theta\) learns to forecast the initial conditions, we define \(i_0:=0\) and \(\mathcal{I}_\phi\left(\mathrm{x}_t, \cdot, i_0\right):=\mathbf{x}_t\).
Additional loss
- Problem) \(\mathcal{I}_\phi\) is frozen in the second stage & imperfect forecasts \(\hat{\mathbf{x}}_{t+h}=\) \(F_\theta\left(\mathcal{I}_\phi\left(\mathrm{x}_t, \mathrm{x}_{t+h}, i_n\right), i_n\right)\) may degrade accuracy when sequential sampling
- Solution) introduce a one-step look-ahead loss term
- \(\mid \mid F_\theta\left(\mathcal{I}_\phi\left(\mathbf{x}_t, \hat{\mathbf{x}}_{t+h}, i_{n+1}\right), i_{n+1}\right)-\mathbf{x}_{t+h} \mid \mid ^2\) whenever \(n+1<N\) .
- Weight the two loss terms equally.
Additionally, providing a clean or noised form of the initial conditions \(\mathbf{x}_t\) as an additional input to the forecaster net can improve performance
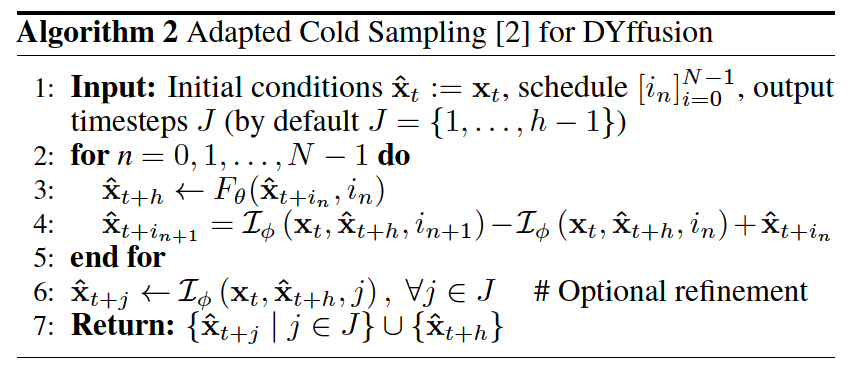
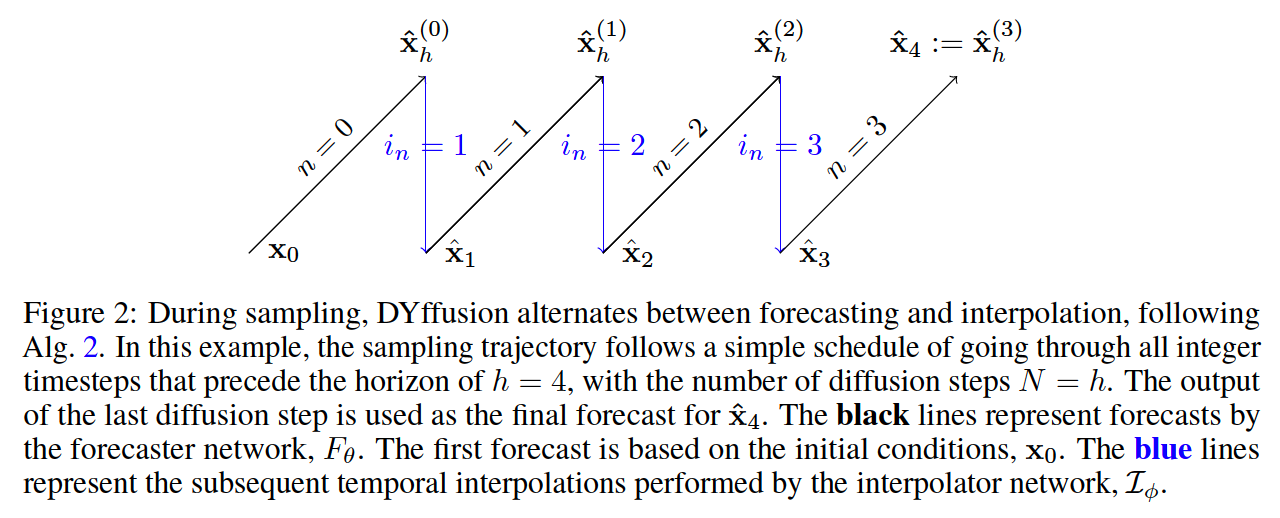
c) Sampling
\(p_\theta\left(\mathbf{s}^{(n+1)} \mid \mathbf{s}^{(n)}, \mathbf{x}_t\right)= \begin{cases}F_\theta\left(\mathbf{s}^{(n)}, i_n\right) & \text { if } n=N-1 \\ \mathcal{I}_\phi\left(\mathbf{x}_t, F_\theta\left(\mathbf{s}^{(n)}, i_n\right), i_{n+1}\right) & \text { otherwise, }\end{cases}\).
- \(\mathbf{s}^{(0)}=\mathbf{x}_t\) : initial conditions
- \(\mathbf{s}^{(n)} \approx \mathbf{x}_{t+i_n}\) : predictions of intermediate steps
\(n=0\) : Start of the reverse process (i.e. \(\mathbf{x}_t\) ),
\(n=N\) : Final output of the reverse process (here, \(\mathbf{x}_{t+h}\) )
d) Memory Footprint
DYffusion
- requires only \(\mathbf{x}_t\) and \(\mathbf{x}_{t+h}\) (plus \(\mathbf{x}_{t+i}\) during the first stage) to train
Direct multi-step prediction models
-
require \(\mathbf{x}_{t: t+h}\) to compute the loss
( must fit \(h+1\) timesteps of data into memory, which scales poorly with the forecasting horizon \(h\) )
e) Reverse process as ODE.
DYffusion models the dynamics as
- \(\frac{d \mathbf{x}(s)}{d s}=\frac{d \mathcal{I}_\phi\left(\mathbf{x}_t, F_\theta(\mathbf{x}, s), s\right)}{d s}\).
During prediction,
- \(\mathbf{x}(s)=\mathbf{x}(t)+\int_t^s \frac{d \mathcal{I}_\phi\left(\mathbf{x}_t, F_\theta(\mathbf{x}, s), s\right)}{d s} d s \quad \text { for } s \in(t, t+h]\).
- The initial condition is given by \(\mathbf{x}(t)=\mathbf{x}_t\).