
Patch Diffusion: Faster and More Data-Efficient Training of Diffusion Models
Contents
- Abstract
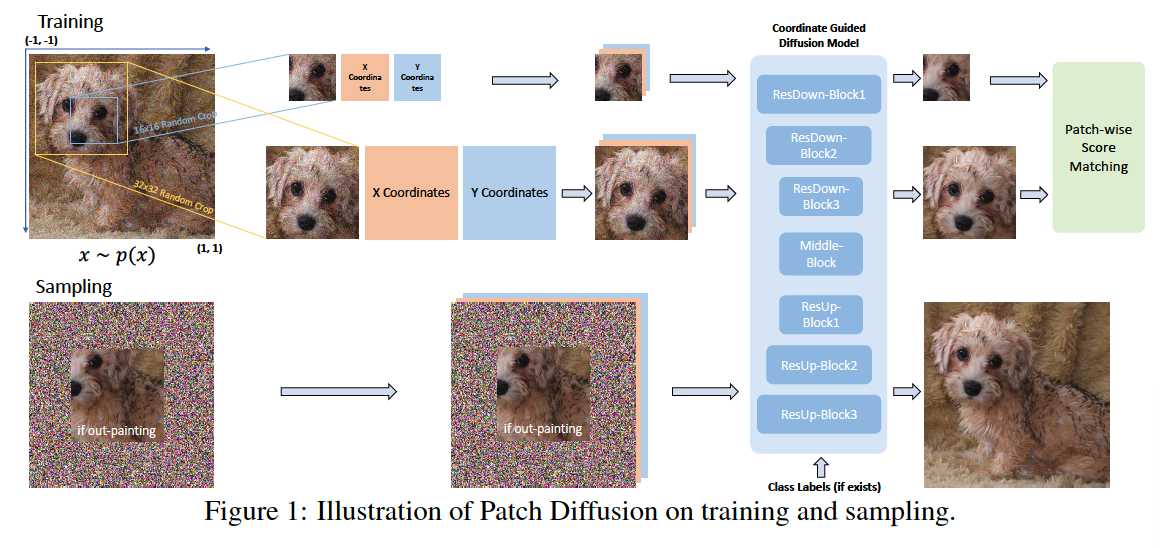
- Patch Diffusion Training
- Patch-wise Score Matching
- Progressive and Stochastic Patch Size Scheduling
- Conditional Coordinates for Patch Location
Abstract
Patch Diffusion
- Generic patch-wise training framework
- Improve data efficiency
- Conditional score function at the patch level
- Two conditions
- (1) Patch location is included as additional coordinate
- (2) Patch size is randomized and diversified
- to encode the cross-region dependency at multiple scales
- Achieve \(\gt\) 2x faster training
1. Patch Diffusion Training
Notation
- Dataset \(\left\{\boldsymbol{x}_n\right\}_{n=1}^N\), drawn from \(p(\boldsymbol{x})\).
- Perturbed distributions \(p_\sigma(\tilde{\boldsymbol{x}} \mid \boldsymbol{x})=\mathcal{N}(\tilde{\boldsymbol{x}} ; \boldsymbol{x}, \sigma \boldsymbol{I})\)
- sequence of positive noise scales \(\sigma_{\min }=\sigma_0<\cdots<\sigma_t<\cdots<\sigma_T=\sigma_{\max }\),
Generalize to an infinite number of noise scale, \(T \rightarrow \infty\),
Forward diffusion process = SDE ( further converted to ODE )
- Closed form of the reverse SDE:
- \(d \boldsymbol{x}=\left[\boldsymbol{f}(\boldsymbol{x}, t)-g^2(t) \nabla_{\boldsymbol{x}} \log p_{\sigma_t}(\boldsymbol{x})\right] d t+g(t) d \boldsymbol{w}\).
- Corresponding ODE of the reverse SDE ( = probability flow ODE )
- \(d \boldsymbol{x}=\left[\boldsymbol{f}(\boldsymbol{x}, t)-0.5 g^2(t) \nabla_{\boldsymbol{x}} \log p_{\sigma_t}(\boldsymbol{x})\right] d t\).
Need to learn a function \(s_{\boldsymbol{\theta}}\left(\boldsymbol{x}, \sigma_t\right)\)
- ex) Denoising score matching
- After learning \(s_{\boldsymbol{\theta}}\left(\boldsymbol{x}, \sigma_t\right)\), we can obtain an estimated reverse SDE or ODE to collect data samples from the estimated data distribution.
Introduce our patch diffusion training in 3 subsections
- (1) Conditional score matching
- On randomly cropped image patches
- Condition: patch location & patch
- (2) Pixel coordinate systems
- To provide better guidance on patch-level score matching
- (3) Sampling
- w/o the need to explicitly sample separate local patches and merge them afterwards.
(1) Patch-wise Score Matching
Denoising score-matching
- Denoiser \(D_{\boldsymbol{\theta}}\left(\boldsymbol{x} ; \sigma_t\right)\)
- Minimizes \(\mathbb{E}_{\boldsymbol{x} \sim p(\boldsymbol{x})} \mathbb{E}_{\boldsymbol{\epsilon} \sim \mathcal{N}\left(\mathbf{0}, \sigma_t^2 \boldsymbol{I}\right)} \mid \mid D_{\boldsymbol{\theta}}\left(\boldsymbol{x}+\boldsymbol{\epsilon} ; \sigma_t\right)-\boldsymbol{x} \mid \mid _2^2\).
- Score function : \(s_{\boldsymbol{\theta}}\left(\boldsymbol{x}, \sigma_t\right)=\left(D_{\boldsymbol{\theta}}\left(\boldsymbol{x} ; \sigma_t\right)-\boldsymbol{x}\right) / \sigma_t^2\)
Denoising score-matching + Patchify
- Step 1) Randomly crop small patches \(\boldsymbol{x}_{i, j, s}\),
- \((i, j)\) : location of patch & \(s\) : patch size
- Step 2) Minimize
- \(\mathbb{E}_{\boldsymbol{x} \sim p(\boldsymbol{x}), \boldsymbol{\epsilon} \sim \mathcal{N}\left(\mathbf{0}, \sigma_t^2 \boldsymbol{I}\right),(i, j, s) \sim \mathcal{U}} \mid \mid D_{\boldsymbol{\theta}}\left(\tilde{\boldsymbol{x}}_{i, j, s} ; \sigma_t, i, j, s\right)-\boldsymbol{x}_{i, j, s} \mid \mid _2^2\).
- where \(\tilde{\boldsymbol{x}}_{i, j, s}=\boldsymbol{x}_{i, j, s}+\boldsymbol{\epsilon}\) and \(\mathcal{U}\) denotes the uniform distn
- \(\mathbb{E}_{\boldsymbol{x} \sim p(\boldsymbol{x}), \boldsymbol{\epsilon} \sim \mathcal{N}\left(\mathbf{0}, \sigma_t^2 \boldsymbol{I}\right),(i, j, s) \sim \mathcal{U}} \mid \mid D_{\boldsymbol{\theta}}\left(\tilde{\boldsymbol{x}}_{i, j, s} ; \sigma_t, i, j, s\right)-\boldsymbol{x}_{i, j, s} \mid \mid _2^2\).
-
Conditional score function : \(s_{\boldsymbol{\theta}}\left(\boldsymbol{x}, \sigma_t, i, j, s\right)\), is defined on each local patch
\(\rightarrow\) Learn the scores for pixels within each image patch
- conditioning on its location and patch size
Challenge : score function \(s_{\boldsymbol{\theta}}\left(\boldsymbol{x}, \sigma_t, i, j, s\right)\) has only seen local patches
( may have not captured the global cross-region dependency between local patches )
Solution:
- (1) Random patch sizes
- sampled from a mixture of small and large patch sizes
- cropped large patch could be seen as a sequence of small patches
- (2) Involving a small ratio of full-size images
- in some iterations during training, full-size images are required to be seen.
(2) Progressive and Stochastic Patch Size Scheduling
Propose patch-size scheduling
\(s \sim p_s:= \begin{cases}p & \text { when } s=R, \\ \frac{3}{5}(1-p) & \text { when } s=R / / 2, \\ \frac{2}{5}(1-p) & \text { when } s=R / / 4 .\end{cases}\).
Two patch-size schedulings
- (1) Stochastic:
- randomly sample \(s \sim p_s\) for each mini-batch
- (2) Progressive
- from small patches to large patches
(3) Conditional Coordinates for Patch Location
( Motivated by COCO-GAN )
Incorporate and simplify the conditions of patch locations in the score function
\(\rightarrow\) Pixel-level coordinate system
-
normalize the pixel coordinate values to \([-1,1]\)
-
concatenate the two coordinate channels with the original image channels
( = input of our denoiser \(D_{\boldsymbol{\theta}}\). )
When computing the loss … ignore the reconstructed coordinate channels
( = only minimize the loss on the image channels )