
Discrete Graph Structure Learning for Forecasting Multiple Time Series (2021, 11)
Contents
- Abstract
- Introduction
- Related Work
- Method
- Graph Structure Parameterization
- GNN Forecasting
- Training, optionally with a Priori Knowledge of the graph
0. Abstract
pairwise information among MTS
\(\rightarrow\) use GNN to capture!
Propose
-
learning the “STRUCTURE” simultaneously with “GNN”
-
cast the problem as..
-
learning a probabilistic graph model,
through optimizing the mean performance over the graph distribution
-
1. Introduction
MTS forecasting
- “interdependency” among variables are imporatnt!
- GNN approaches
- 1) GCRN
- Structured sequence modeling with graph convolutional recurrent networks
- 2) DCRNN
- Diffusion convolutional recurrent neural network: Data-driven traffic forecasting
- 3) STGCN
- Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting
- 4) T-GCN
- T-GCN: A temporal graph convolutional network for traffic prediction
- 1) GCRN
But, graphs structures are not always available!
\(\rightarrow\) LDS ( solve ase bilevel program )
Problems of LDS
- 1) computationally expensive ( inner & outer objective )
- 2) challenging to scale
\(\rightarrow\) this paper uses “UNI-level optimization”
proposes GTS (Graph for Time Series)
- (LDS) inner optimization \(w(\theta)\)
- (GTS) paramterization \(w(\theta)\)
2. Related Work
GNN for time series
- GCRN, DCRNN, STGCN, T-GCN
- combine “temporal recurrent processing” with GCN to augment representation learning of individual TS
-
MTGNN
-
parameterizes the graph as a degree-\(k\) graph,
learned end-to-end with a GNN for TS forecasting
-
-
NRI
- adopts a latent-variable approach
- learns a latent graph for forecasting system dynamics
3. Method
Notation
- \(X\) : training data
- 3 dimensional tensor
- 1) feature
- 2) time
- 3) \(n\) series
- \(X^i\) : \(i\)-th series
- 3 dimensional tensor
- \(S\) : total time steps
- \(T\) : window size
- \(\tau\) : forecasting horizon
- \(\widehat{X}_{t+T+1: t+T+\tau}=f\left(A, w, X_{t+1: t+T}\right)\).
- training objective :
- \(\sum_{t} \ell\left(f\left(A, w, X_{t+1: t+T}\right), X_{t+T+1: t+T+\tau}\right)\).
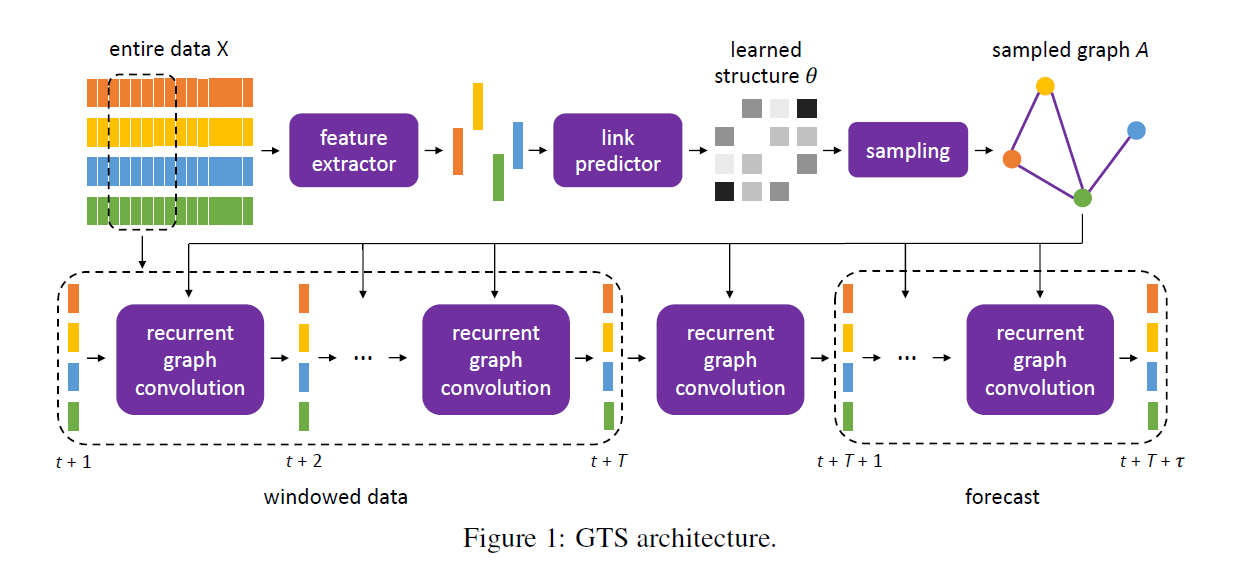
(1) Graph Structure Parameterization
Binary matrix \(A \in\{0,1\}^{n \times n}\)
\(\rightarrow\) let \(A\) be a r.v of matrix Bernoulli distn
- parameterized by \(\theta \in[0,1]^{n \times n}\)
- \(A_{i j}\) is independent for all the \((i, j)\) pairs with \(A_{i j} \sim \operatorname{Ber}\left(\theta_{i j}\right) .\)
Training Objective
- (before) \(\sum_{t} \ell\left(f\left(A, w, X_{t+1: t+T}\right), X_{t+T+1: t+T+\tau}\right)\)
- (after) \(\mathrm{E}_{A \sim \operatorname{Ber}(\theta)}\left[\sum_{t} \ell\left(f\left(A, w, X_{t+1: t+T}\right), X_{t+T+1: t+T+\tau}\right)\right]\).
Gumbel reparameterization trick
-
\(A_{i j}=\operatorname{sigmoid}\left(\left(\log \left(\theta_{i j} /\left(1-\theta_{i j}\right)\right)+\left(g_{i j}^{1}-g_{i j}^{2}\right)\right) / s\right)\),
where \(g_{i j}^{1}, g_{i j}^{2} \sim \operatorname{Gumbel}(0,1)\) for all \(i\), \(j\)
For parameterization of \(\theta\)…use
- 1) feature extractor ( \(X^{i}\) \(\rightarrow\) \(z^{i}\) )
- make feature vector for each TS
- \(z^{i}=\operatorname{FC}\left(\operatorname{vec}\left(\operatorname{Conv}\left(X^{i}\right)\right)\right)\).
- 2) link predictor ( \(\left(z^{i}, z^{j}\right) \rightarrow \text{scalar} \theta_{i j} \in[0,1]\) )
- input : pair of feature vectors
- output : link probability
- \(\theta_{i j}=\operatorname{FC}\left(\operatorname{FC}\left(z^{i} \mid \mid z^{j}\right)\right)\).
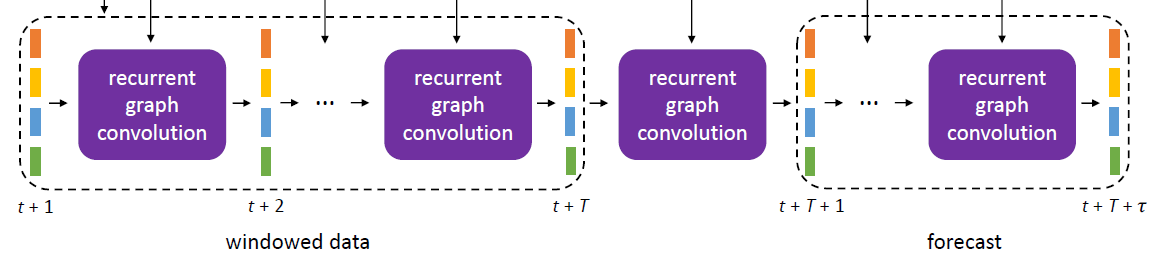
(2) GNN Forecasting
-
use “seq2seq”
- for each TS \(i\) … map \(X_{t+1: t+T}^{i}\) to \(X_{t+T+1: t+T+\tau}^{i}\)
- with “GCN” version
-
Encoder
- Encoder Input : \(X_{t^{\prime}}\) for all series
- Process : updates the internal hidden state from \(H_{t^{\prime}-1}\) to \(H_{t^{\prime}}\)
- Encoder output : \(H_{t+T}\) ( = summary of input )
-
Decoder
- Decoder Input : \(H_{t+T}\)
- Process : evolves the hidden state for another \(\tau\) steps
- Decoder Outputs :
- Each hidden state \(H_{t^{\prime}}, t^{\prime}=t+T+1: t+T+\tau\), simultaneously serves as the output \(\widehat{X}_{t^{\prime}}\)
- becomes input to the next time step
-
use “diffusion convolutional GRU” in DCRNN
( = designed for “directed graphs” )
(3) Training, optionally with a Priori Knowledge of the graph
(a) Base Training Loss
- per window
- use MAE
- \(\ell_{\text {base }}^{t}\left(\widehat{X}_{t+T+1: t+T+\tau}, X_{t+T+1: t+T+\tau}\right)=\frac{1}{\tau} \sum_{t^{\prime}=t+T+1}^{t+T+\tau} \mid \widehat{X}_{t^{\prime}}-X_{t^{\prime}} \mid\).
(b) Regularization
-
sometimes, actual graph among TS is known ( ex. Traffic Network )
-
also, “neighborhood graph” ( ex. kNN ) may still serve as a reasonable knowledge
\(\rightarrow\) can be prior graph \(A^a\)
-
use CE loss, between \(\theta\) & \(A^a\)
-
\(\ell_{\text {reg }}=\sum_{i j}-A_{i j}^{\mathrm{a}} \log \theta_{i j}-\left(1-A_{i j}^{\mathrm{a}}\right) \log \left(1-\theta_{i j}\right) \text {. }\).
Overall Training Loss = \(\sum_{t} \ell_{\text {base }}^{t}+\lambda \ell_{\text {reg }}\).